Afinná geometria
| Portál: | Virtuálna Univerzita Mateja Bela |
| Kurz: | Vybrané kapitoly z aritmetiky a analytickej geometrie |
| Kniha: | Afinná geometria |
| Vytlačil(a): | Hosťovský používateľ |
| Dátum: | streda, 3 júla 2024, 11:31 |
Úvod
Analytická geometria
je oblasť matematiky, v ktorej sa geometrické útvary študujú pomocou súradnicovej sústavy (pomocou analytických vyjadrení - rovníc).
Než pristúpime k takémuto štúdiu, tak si zopakujeme niektoré základné pojmy a vlastnosti vektorových priestorov. V záverečnej kapitole uvádzame dostatočný
počet e-verzií prác.
Dnes existujú vedľa seba dva spôsoby budovania geometrie:
Dnes existujú vedľa seba dva spôsoby budovania geometrie:
- Syntetický - bez súradníc
- názorná, v ktorej sa konštrukcie geometrických útvarov uskutočňujú v súlade s axiomatickým systémom; dôkazy tvrdení sa robia prevažne konštrukčne;
- vychádzame z euklidovského priestoru podľa (Euklidove Základy);
- potom zavádzame pojem vektora a následne vektorového priestoru;
- syntetická metóda neformuluje explicitne vzťah geometrie k základnému poľu priestoru (Čižmár, J., 2007);
- základná schéma budovania: najprv vybudujeme euklidovský priestor a potom skonštruujeme vektorový priestor nad daným poľom,
- s algebraickým pohľadom na štruktúru vektorových priestoroch ste sa oboznámili v kurze Lineárna algebra.
- Analytická – so súradnicami
- do hry vstupuje pole – najčastejšie ide pole reálnych čísel;
- v 19. storočí sa v analytickej metóde začali využívať vektory a začali sa skúmať afinné (polohové) vlastnosti vektorov – operácie s vektormi;
- pri tejto metóde sa v nej pracuje ľahšie, v súčasnosti významne pomáhajú aj počítače;
- viac príležitostí skĺznuť k mechanickému počítaniu namiesto porozumenia geometrickej podstate daného problému,
- základná schéma budovania: najprv skonštruujeme vektorový priestor nad daným poľom a potom afinný priestor resp. euklidovský priestor.
Pohľad na historický vývoj analytickej geometrie
- 300 rokov pred naším letopočtom: Euklides: euklidovská rovina
- 1635: Descartes, Fermat: zavedenie súradníc do euklidovskej roviny.
Zakladateľmi analytickej geometrie boli francúzski matematici Pierre de Fermat a René Descartes, ktorý v roku 1635 zaviedol súradnice bodov.
Karteziánska súradnicová sústava je pomenovaná podľa latinského prepisu mena Descartes, t. j. Cartesius. - 1804: Bolzano: operácie s bodmi a priamkami, v ktorých je badateľný koncept vektora
- 1843: Hamilton: kvaternióny ako lineárne kombinácie
- 1844: Grassmann: prvýkrát prišiel s konceptom vektorového priestoru
- 1888: Peano: moderná definícia vektorového priestoru
- 1920: Banach, Hilbert: axiomatická definícia vektorového priestoru
Informačné listy
Analytická geometria 1.
Stručná osnova predmetu
- Vektorový priestor. Skalárny súčin vektorov a jeho vlastnosti. Norma vektora, normovaný vektor. Schwartzova nerovnosť.
- Uhol dvoch vektorov. Ortogonálne a ortonormálne vektory. Schmidtov ortogonalizačný proces. Totálne kolmé a kolmé podpriestory.
- Vonkajší súčin v
 -rozmernom vektorovom priestore. Vektorový súčin v 3-rozmernom vektorovom priestore. Ortogonálny doplnok vektorov.
-rozmernom vektorovom priestore. Vektorový súčin v 3-rozmernom vektorovom priestore. Ortogonálny doplnok vektorov. - Afinný priestor a jeho vlastnosti. Lineárna sústava súradníc. Transformácia lineárnej sústavy súradníc. Deliaci pomer, stred dvojice bodov.
- Podpriestory afinného priestoru, parametrické vyjadrenie afinného podpriestoru, vzájomná poloha afinných podpriestorov.
- Priečka mimobežiek, určenie priečky daným bodom a daným smerom.
- Spojenie afinných podpriestorov. Všeobecná rovnica nadroviny. Zväzok priamok a zväzok rovín.
- Euklidovský priestor. Karteziánska súradnicová sústava. Normálový vektor nadroviny. Vzdialenosť dvoch bodov (bodu od podpriestoru).
- Vzájomná poloha podpriestorov v n-rozmernom euklidovskom priestore. Vzdialenosť dvoch mimobežných podpriestorov. Odchýlka dvoch podpriestorov.
- Afinné zobrazenie a jeho anylytické vyjadrenie.
Analytická geometria 2.
Stručná osnova predmetu
- Analytické vyjadrenie zhodného zobrazenia. Samodružné prvky zhodnosti. Grupa zhodností.
- Posunutie a rovnoľahlosť ako afinné zobrazenie.
- Zhodné zobrazenia v rovine, ich analytické vyjadrenie. Stredová súmernosť. Otočenie.
- Osová súmernosť, jej analytické vyjadrenie.
- Klasifikácia zhodností euklidovskej roviny a v euklidovskom priestore. Skladanie zhodných zobrazení.
- Podobné zobrazenie. Samodružné prvky podobnosti. Analytické vyjadrenie podobnosti euklidovskej roviny.
- Úlohy riešené s využitím programu GeoGebra.
- Zhodné a podobné zobrazenia v rovine a v priestore v učive ZŠ a SŠ.
- Rovnoľahlosť v školskej matematike. Rovnoľahlosť kružníc. Využitie rovnoľahlosti.
 \)
\)
Vektorový priestor
Syntetický (geometrický) prístup
- Orientovaná úsečka je úsečka, ktorej krajné body majú určené poradie (pripúšťame aj nulovú orientovanú úsečku).
Ak
 je orientovaná úsečka, bod
je orientovaná úsečka, bod  sa nazýva jej začiatočný bod, bod
sa nazýva jej začiatočný bod, bod  jej koncový bod.
jej koncový bod. - Hovoríme, že orientované úsečky
 sú súhlasne orientované (rovnobežné, majú ten istý smer),
ak polpriamky
sú súhlasne orientované (rovnobežné, majú ten istý smer),
ak polpriamky  incidujú s priamkami tej istej osnovy a zároveň:
incidujú s priamkami tej istej osnovy a zároveň:
- jedna z polpriamok je časťou druhej alebo
- obe polpriamky ležia v tej istej polrovine určenej priamkou
 .
. - V opačnom prípade sa orientované úsečky nazývajú nesúhlasne orientované. Symbolický zápis pre súhlasne orientované úsečky
 a nesúhlasne orientované
a nesúhlasne orientované  .
.
- Orientované úsečky sú ekvivalentné ak stredy úsečiek
 sú totožné.
sú totožné. - Množina všetkých orientovaných úsečiek ekvivalentných s
 sa nazýva geometrický vektor.
sa nazýva geometrický vektor. - Orientovaná úsečka
 sa nazýva reprezentant (umiestnenie) vektora
sa nazýva reprezentant (umiestnenie) vektora  ,
zapisujeme
,
zapisujeme  .
. - Geometrický vektor sa nazýva aj voľný vektor (množina všetkých orientovaných úsečiek) a konkrétna orientovaná úsečka sa nazýva viazaný vektor.
- Orientovaná úsečka
 je reprezentuje opačný vektor k vektoru a označujeme ho
je reprezentuje opačný vektor k vektoru a označujeme ho  .
.
Cvičenie - [Mon 1.1.16 b]. Nezabudnite na nulové vektory.
Východiskové definície
Vo všeobecnosti vektor je množina všetkých navzájom zhodných, súhlasne orientovaných úsečiek.
Umiestnením vektora sa nazýva každá orientovaná úsečka, ktorá tento vektor určuje. Umiestnením vektora do bodu sa nazýva také jeho umiestnenie, ktorého začiatočným bodom je daný bod.
Vektor určený orientovanou úsečkou označíme tiež ako rozdiel bodov:  . Otvorte si applet
Tu.
. Otvorte si applet
Tu.
"Slovo vektor je prevzaté z latinského slova vector („nositeľ“, …). Vektor vznikol z potrieb fyziky (kde napr. vektor interpretujeme ako silu), do matematiky zaviedol vektory v r. 1853 írsky matematik a fyzik W. R. Hamilton (1805 – 1865). Takmer súčasnú podobu dal „vektorovému počtu“ na konci 19. storočia americký fyzik J. W. Gibbs (1839 – 1903)." Prevzaté z práce (Vranková).
Vo všeobecnosti vektor je množina všetkých navzájom zhodných, súhlasne orientovaných úsečiek.
Umiestnením vektora sa nazýva každá orientovaná úsečka, ktorá tento vektor určuje. Umiestnením vektora do bodu sa nazýva také jeho umiestnenie, ktorého začiatočným bodom je daný bod.
Vektor určený orientovanou úsečkou
označíme tiež ako rozdiel bodov: . Otvorte si applet
Tu.
"Slovo vektor je prevzaté z latinského slova vector („nositeľ“, …). Vektor vznikol z potrieb fyziky (kde napr. vektor interpretujeme ako silu), do matematiky zaviedol vektory v r. 1853 írsky matematik a fyzik W. R. Hamilton (1805 – 1865). Takmer súčasnú podobu dal „vektorovému počtu“ na konci 19. storočia americký fyzik J. W. Gibbs (1839 – 1903)." Prevzaté z práce (Vranková).
Okruh ") s jednotkou
s jednotkou 
 ), v ktorom každý nenulový prvok má vzhľadom na násobenie inverzný prvok, nazývame telesom.
Komutatívne teleso, v ktorom násobenie je komutatívna operácia, nazývame pole.
), v ktorom každý nenulový prvok má vzhľadom na násobenie inverzný prvok, nazývame telesom.
Komutatívne teleso, v ktorom násobenie je komutatívna operácia, nazývame pole.
s jednotkou ), v ktorom každý nenulový prvok má vzhľadom na násobenie inverzný prvok, nazývame telesom.
Komutatívne teleso, v ktorom násobenie je komutatívna operácia, nazývame pole.
Nech sú dané
• neprázdna množina , ktorej prvky nazývame vektory,
, ktorej prvky nazývame vektory,
• pole , ktorého prvky nazývame skaláry,
, ktorého prvky nazývame skaláry,
• zobrazenie , ktoré nazývame sčítanie vektorov,
, ktoré nazývame sčítanie vektorov,
• zobrazenie , ktoré nazývame násobenie vektora skalárom (prvkom z telesa
, ktoré nazývame násobenie vektora skalárom (prvkom z telesa  ).
).
• neprázdna množina
, ktorej prvky nazývame vektory,
• pole
, ktorého prvky nazývame skaláry,
• zobrazenie
, ktoré nazývame sčítanie vektorov,
• zobrazenie
, ktoré nazývame násobenie vektora skalárom (prvkom z telesa ).
Definícia.
Vektorový priestor nad poľom1) je množina spolu s dvoma binárnymi operáciami (
je množina spolu s dvoma binárnymi operáciami (  )
práve vtedy, keď súčasne platia vzťahy:
)
práve vtedy, keď súčasne platia vzťahy:
Vektorový priestor nad poľom1)
je množina spolu s dvoma binárnymi operáciami ( )
práve vtedy, keď súčasne platia vzťahy:
") je abelovská grupa.
Vektorové axiómy
je abelovská grupa.
Vektorové axiómy
- asociatívnosť pre násobenie vektora skalárom:
 = (ab) \cdot \vec v")
- invariancia vektora pri vynásobení jednotkovým prvkom poľa:
 ,
,
kde označuje multiplikatívnu identitu vo
označuje multiplikatívnu identitu vo - distributívnosť (skalárneho) násobenia k sčítaniu vektorov:
 = a \cdot \vec u + a \cdot \vec v")
- distributívnosť násobenia vektora
 , ku sčítaniu skalárov
, ku sčítaniu skalárov  :
:  \cdot \vec v = a \cdot \vec v + b \cdot \vec v")
Na zopakovanie základných pojmov a vlastností algebraickej štruktúry "Vektorový priestor" odporúčame okrem práce od profesora Haviara aj e-knihu venovanú vektorovým priestorom od RNDr. Edity Vrankovej z Trnavskej univerzity v Trnave. Tiež na zopakovanie operácií s vektormi odporúčame prácu "Vektory v geometrii" od PaedDr. Miroslava Tisoňa, PhD., ktorá je dostupná
Tu.
Interpretujte vzťahy uvedené v definícii vektorového priestoru v prostredí GeoGebra!
Interpretujte vzťahy uvedené v definícii vektorového priestoru v prostredí GeoGebra!
Analytický (algebraický) prístup
\)
Príklady vektorového priestoru
- Vektory v rovine so sčitovaním a násobením ako ho poznáte zo strednej školy, tvoria vektorový priestor nad telesom reálnych čísel
 .
.
- Usporiadané
 -tice reálnych čísel s operáciami
-tice reálnych čísel s operáciami  definovanými po súradniciach tvoria vektorový priestor
nad telesom reálnych čísel
definovanými po súradniciach tvoria vektorový priestor
nad telesom reálnych čísel  .
.
 + (y_1, y_2 . . . , y_n) = (x_1 + y_1, x_2 + y_2 . . . , x_n + y_n)")
 = (c \cdot x _1, c \cdot x_2, . . . , c \cdot x_n)")
V ďalších častiach budeme prevažne pracovať s vektormi, ktoré tvoria usporiadané-tice reálnych čísel a to len pre rovinu  resp. priestor
resp. priestor 
Ďalšie príklady vektorových priestorov sú množiny (všetkých)
- polynómov v jednej neurčitej nad poľom reálnych čísel, operácia - sčítanie polynómov "podľa rovnakých mocnín",
- reálnych funkcií, operácia - bežný súčet funkčných hodnôt,
- matíc typu
 , operácia sčítania matíc - sčítanie v rovnakom riadku a stĺpci.
, operácia sčítania matíc - sčítanie v rovnakom riadku a stĺpci.
Cvičenie.
Nech je daná množina usporiadaných trojíc resp. dvojíc s obvyklým sčitovaním "po zložkách" trojíc resp. dvojíc reálnych čísel.
usporiadaných trojíc resp. dvojíc s obvyklým sčitovaním "po zložkách" trojíc resp. dvojíc reálnych čísel.
Nech je daná množina
usporiadaných trojíc resp. dvojíc s obvyklým sčitovaním "po zložkách" trojíc resp. dvojíc reálnych čísel.
 \in \mathbb R^3 ; x_1 + x_2 -2x_3 = 0}\rbrace") .
. \in \mathbb Z^2 ; x-3y=0 }\rbrace") .
. \in \mathbb Z^2 ; x+3y=1}\rbrace") .
.- Rozhodnite, či množina
 \in \mathbb Z^2 ; p(x);8p(0)+6p(1)=0}\rbrace") je vektorovým priestorom2) nad telesom R. (Množina je tvorená polynómami, pre ktoré je súčet osemnásobku hodnoty v nule a šesťnásobku hodnoty v jednotke rovný nule.)
je vektorovým priestorom2) nad telesom R. (Množina je tvorená polynómami, pre ktoré je súčet osemnásobku hodnoty v nule a šesťnásobku hodnoty v jednotke rovný nule.)
Riešenia.
- Uzavretosť operácie sčítania.
Pre ľubovoľné dva vektory, \vec{ b}=\left( b_1,b_2, \frac{b_1+b_2}{2}\right) \in V") pre ich súčet platí
pre ich súčet platí
+(b_1+b_2)}{2} \right) =")
+(a_2+b_2)}{2} \right) \in V") odkiaľ dostávame, že operácia + je uzavretá.
odkiaľ dostávame, že operácia + je uzavretá. - Postupujeme podobne ako v predchádzajúcom prípade.
- Operácia sčítania zrejme nie je uzavretá, lebo pre ľubovoľné dva vektory
, \vec{ b}=\left( 1-3b,b\right) \in V")
,a+b \right) \notin V") .
. -
Uvažujme dva ľubovoľné polynómy
, p_2(x)") , ktoré sú prvkami množiny . Ďalej majme polynóm
, ktoré sú prvkami množiny . Ďalej majme polynóm =p_1(x)+p_2(x)") ,
ktorý je ich súčtom. Pre polynómy
,
ktorý je ich súčtom. Pre polynómy , p_2(x)") platí
platí
+6p_1(1)=0") ,
,
+6p_2(1)=0") .
.
Sčítaním oboch rovníc získame![\small 8[p_1(0)+p_2(0)]+6[p_1(1)+p_2(1)]=0](https://lms.umb.sk/filter/tex/pix.php/6140b7c4140309d2fa7b03be3821de1e.png "\small 8[p_1(0)+p_2(0)]+6[p_1(1)+p_2(1)]=0") . Odkiaľ dostávame
. Odkiaľ dostávame
+6p_{12}(1)=0") ,
,
teda že polynóm") , čo je súčet ľubovoľných dvoch polynómov množiny , je opäť prvkom tejto množiny.
Tým sme dokázali uzavretosť sčítania vektorov.
Pokúste sa o grafickú interpretáciu vektorov, ak budeme brať do úvahy iba polynómy 1. stupňa alebo len polynómy 2. stupňa. Viete určiť počiatočné a koncové body týchto vektorov? Otvorte so applet Tu.
, čo je súčet ľubovoľných dvoch polynómov množiny , je opäť prvkom tejto množiny.
Tým sme dokázali uzavretosť sčítania vektorov.
Pokúste sa o grafickú interpretáciu vektorov, ak budeme brať do úvahy iba polynómy 1. stupňa alebo len polynómy 2. stupňa. Viete určiť počiatočné a koncové body týchto vektorov? Otvorte so applet Tu.
Poznámka.
V nasledujúcom texte budeme vektor označovať aj symbolom  .
.
V nasledujúcom texte budeme vektor
označovať aj symbolom .
__________________________________________________________________________________________
1) Pole je teleso s komutatívnou multiplikatívnou operáciou .
.
2) Pozrite si stránku https://reseneulohy.cz/1356/vektorovy-prostor-ii
1) Pole je teleso s komutatívnou multiplikatívnou operáciou
.
2) Pozrite si stránku https://reseneulohy.cz/1356/vektorovy-prostor-ii
\)
Lineárna závislosť vektorov
V predchádzajúcej kapitole sme pri definícii vektorového priestoru uviedli, že dvojica ") je Abelova komutatívna grupa.
To znamená, že binárna operácia "+" je komutatívna a asociatívna. Zároveň sme definovali násobenie skalárom.
Pomocou týchto dvoch operácií pripomenieme pojmy: lineárna kombinácia, závislosť a nezávislosť vektorov, ktoré sú dôležité a potrebné pri geometrickej manipulácii s vektormi.
je Abelova komutatívna grupa.
To znamená, že binárna operácia "+" je komutatívna a asociatívna. Zároveň sme definovali násobenie skalárom.
Pomocou týchto dvoch operácií pripomenieme pojmy: lineárna kombinácia, závislosť a nezávislosť vektorov, ktoré sú dôležité a potrebné pri geometrickej manipulácii s vektormi.
je Abelova komutatívna grupa.
To znamená, že binárna operácia "+" je komutatívna a asociatívna. Zároveň sme definovali násobenie skalárom.
Pomocou týchto dvoch operácií pripomenieme pojmy: lineárna kombinácia, závislosť a nezávislosť vektorov, ktoré sú dôležité a potrebné pri geometrickej manipulácii s vektormi.
Lineárna kombinácia.
Nech je daných vektorov
vektorov  . Každý vektor
. Každý vektor  vyjadrený v tvare
vyjadrený v tvare  , kde
, kde  sú reálne čísla, sa nazýva lineárna kombinácia vektorov
sú reálne čísla, sa nazýva lineárna kombinácia vektorov  .
.
Nech je daných
vektorov . Každý vektor vyjadrený v tvare , kde sú reálne čísla, sa nazýva lineárna kombinácia vektorov .
Príklady.



Lineárna závislosť.
Vektory voláme lineárne závislé, ak rovnica
voláme lineárne závislé, ak rovnica

je splnená tak, že aspoň jedno z čísel je rôzne od nuly.
Vektory
voláme lineárne závislé, ak rovnica
je splnená tak, že aspoň jedno z čísel
je rôzne od nuly.
Veta.
Ak sú vektory lineárne závislé, tak aspoň jeden z nich je lineárnou kombináciou ostatných.
Ak sú vektory
lineárne závislé, tak aspoň jeden z nich je lineárnou kombináciou ostatných.
Lineárna nezávislosť.
Vektory voláme lineárne nezávislé, ak rovnica
voláme lineárne nezávislé, ak rovnica

je splnená len pre .
.
Vektory
voláme lineárne nezávislé, ak rovnica
je splnená len pre
.
Príklady.



, \pmb v_2=(1,1,0) , \pmb v_3=(1,0,0)")
, \pmb v_2=(1,0,-1) , \pmb v_3=(1,1,-1)")
Po zavedení pojmov lineárna závislosť a lineárna nezávislosť môžeme pristúpiť k pojmom dimenzia a báza vektorového priestoru. Predtým musíme zadefinovať lineárny obal  vektorov a pridať niektoré vektorové axiómy. V ďalšom budeme uvažovať vektorový priestor
vektorov a pridať niektoré vektorové axiómy. V ďalšom budeme uvažovať vektorový priestor  nad telesom
nad telesom  .
.
vektorov a pridať niektoré vektorové axiómy. V ďalšom budeme uvažovať vektorový priestor nad telesom .
Definícia.
Nech je vektorový priestor nad telesom  a nech sú dané vektory
a nech sú dané vektory  . Potom množinu všetkých vektorov
. Potom množinu všetkých vektorov

nazývame lineárny obal vektorov alebo podpriestor
generovaný vektormi
alebo podpriestor
generovaný vektormi  .
Označujeme ho
.
Označujeme ho
![\small M =: \pmb[ \pmb {v_1} , \cdot \pmb {v_2}, \cdot \cdot \cdot, \pmb {v_r}\pmb]](https://lms.umb.sk/filter/tex/pix.php/5789dac5155440696772163cb4343bad.png "\small M =: \pmb[ \pmb {v_1} , \cdot \pmb {v_2}, \cdot \cdot \cdot, \pmb {v_r}\pmb]") .
.
Ak platí![\small \pmb[\pmb {v_1} , \cdot \pmb {v_2}, \cdot \cdot \cdot, \pmb {v_r}\pmb ]= V](https://lms.umb.sk/filter/tex/pix.php/355f904d1a775cad94eb0c3b2418a0ca.png "\small \pmb[\pmb {v_1} , \cdot \pmb {v_2}, \cdot \cdot \cdot, \pmb {v_r}\pmb ]= V") , hovoríme, že vektory
, hovoríme, že vektory  generujú vektorový priestor .
generujú vektorový priestor .
Nech
je vektorový priestor nad telesom a nech sú dané vektory . Potom množinu všetkých vektorov
nazývame lineárny obal vektorov
alebo podpriestor
generovaný vektormi .
Označujeme ho
.
Ak platí
, hovoríme, že vektory generujú vektorový priestor .
Cvičenie.
-
Zistite, či vektor
") patrí do lineárneho obalu množiny
patrí do lineárneho obalu množiny ,(1;0;2),(-2;1;0)}\rbrace") .
.
Dokážte, že ľubovoľný vektor ∈ \mathbb R^3") leží v lineárnom obale množiny
leží v lineárnom obale množiny  pre ľubovoľnú trojicu
pre ľubovoľnú trojicu ") reálnych čísel.
reálnych čísel. -
Je daná množina
,(4,1,4),(3,2,2)}⊂\mathbb{\pmb Z^3_5}\rbrace") . Rozhodnite, či je vektor
. Rozhodnite, či je vektor ") prvkom lineárneho
obalu množiny
prvkom lineárneho
obalu množiny  .
.
Množina obsahuje trojice prvkov telesa zvyškových tried modulo 5.
zvyškových tried modulo 5. -
Zistite, či vektor
") patrí do lineárneho obalu množiny
patrí do lineárneho obalu množiny ,(2;1;0),(0;1;2),(5;2;-1)}\rbrace") . Ďalšie úlohy na Tu.
. Ďalšie úlohy na Tu.
Riešenie
Cvičenie 1
Hľadajme koeficienty , pre ktoré platí rovnosť
, pre ktoré platí rovnosť
 = α (1, 2, 3) + β (1, 0, 2) + γ (−2, 1, 0)") .
.
Po úprave a porovnaní jednotlivých zložiek dostávame sústavu

Napríklad Gaussovou eliminačnou metódou zistíme, že sústava má riešenie pre všetky . Nájdite toto riešenie. Pozrite si prácu [Olšák, str. 24].
. Nájdite toto riešenie. Pozrite si prácu [Olšák, str. 24].
Cvičenie 2
Cvičenie 1
Hľadajme koeficienty
, pre ktoré platí rovnosť
.
Po úprave a porovnaní jednotlivých zložiek dostávame sústavu
Napríklad Gaussovou eliminačnou metódou zistíme, že sústava má riešenie pre všetky
. Nájdite toto riešenie. Pozrite si prácu [Olšák, str. 24].Cvičenie 2
- Lineárny obal množiny priestoru
 je množina všetkých lineárnych kombinácií vektorov množiny s koeficientmi
z poľa. Teda stačí zistiť, či je možné vektor zapísať ako lineárnu kombináciu vektorov množiny .
je množina všetkých lineárnych kombinácií vektorov množiny s koeficientmi
z poľa. Teda stačí zistiť, či je možné vektor zapísať ako lineárnu kombináciu vektorov množiny . - Vektor patrí do lineárneho obalu množiny ak existujú prvky
 tak, aby
tak, aby
+b⋅(4,1,4)+c⋅(3,2,2)=(1,2,3)") .
.
Pre každú vektorovú zložku získame rovnicu. Trojica nasledujúcich rovníc tvorí sústavu, ktorú vyriešime. Pozor – sústavu riešime nad!
 Sčítaním prvej a druhej rovnice dostaneme
Sčítaním prvej a druhej rovnice dostaneme

lebo,3c+2c=0 (mod \; 5)") a sčítaním 3.r.+2.r. dostanme
a sčítaním 3.r.+2.r. dostanme

odkiaľ . Sústava má v poli riešenie. Vektor
. Sústava má v poli riešenie. Vektor ") je lineárnou
kombináciou vektorov množiny . Preto
je lineárnou
kombináciou vektorov množiny . Preto ![\small \pmb {u} \in [M]](https://lms.umb.sk/filter/tex/pix.php/6431c2864e125629b6d107dc96a26489.png "\small \pmb {u} \in [M]") .
.
\)
Dimenzia a báza
Nech je vektorový priestor nad telesom . Po zavedení pojmov lineárna závislosť a lineárna nezávislosť sme zadefinovali lineárny obal ako
množinu všetkých lineárnych kombinácií
 kde sú vopred dané vektory priestoru .
kde sú vopred dané vektory priestoru .
Teraz môžeme pristúpiť k pojmom dimenzia a báza vektorového priestoru. Predtým musíme a pridať niektoré vektorové axiómy.
je vektorový priestor nad telesom . Po zavedení pojmov lineárna závislosť a lineárna nezávislosť sme zadefinovali lineárny obal ako
množinu všetkých lineárnych kombinácií
sú vopred dané vektory priestoru .
Teraz môžeme pristúpiť k pojmom dimenzia a báza vektorového priestoru. Predtým musíme a pridať niektoré vektorové axiómy.
Axiómy dimenzie - rozmeru
- Nech vo vektorovom priestore existuje maximálne
 lineárne nezávislých vektorov, kde je prirodzené číslo.
Číslo nazývame dimenzia vektorového priestoru.
lineárne nezávislých vektorov, kde je prirodzené číslo.
Číslo nazývame dimenzia vektorového priestoru. - Každá
") - tica vektorov je už lineárne závislá.
- tica vektorov je už lineárne závislá. - Podmnožina vektorového priestoru je jeho báza práve vtedy, keď každý vektor
 možno práve jediným spôsobom
vyjadriť ako lineárnu kombináciu
možno práve jediným spôsobom
vyjadriť ako lineárnu kombináciu  navzájom rôznych vektorov množiny .
navzájom rôznych vektorov množiny . - Koeficienty
 nazývame súradnice vektora v vzhľadom na bázu . Označujeme
nazývame súradnice vektora v vzhľadom na bázu . Označujeme  a čítame „súradnice vektora
a čítame „súradnice vektora  vzhľadom na bázu .
vzhľadom na bázu .
Definícia.
Vektorový priestor nad telesom je konečno-rozmerný, ak existuje taká konečná
množina vektorov  , že platí
, že platí
![\small V =: \pmb[ \pmb {v_1} , \cdot \pmb {v_2}, \cdot \cdot \cdot, \pmb {v_n}\pmb]](https://lms.umb.sk/filter/tex/pix.php/d96af90db420b599197cd8a21f7ba21b.png "\small V =: \pmb[ \pmb {v_1} , \cdot \pmb {v_2}, \cdot \cdot \cdot, \pmb {v_n}\pmb]") .
.
Báza je množina lineárne nezávislých vektorov,
ktorá generuje celý priestor .
lineárne nezávislých vektorov,
ktorá generuje celý priestor .
Vektorový priestor
nad telesom je konečno-rozmerný, ak existuje taká konečná
množina vektorov , že platí
.
Báza je množina
lineárne nezávislých vektorov,
ktorá generuje celý priestor .
- Vektorový priestor o dimenzii nad telesom budeme označovať symbolom
") .
. - Vektorový priestor, ktorý sa skladá z práve jedného vektora (obsahuje len nulový vektor) označíme

Príklad.
Majme množinu") všetkých usporiadaných dvojíc reálnych čísel a operácie:
všetkých usporiadaných dvojíc reálnych čísel a operácie:
 \oplus (b_1,b_2 ) =(a_1+b_1,a_2+b_2)") - sčítanie po zložkách.
- sčítanie po zložkách.
 =(k.a_1,k.a_2)") - násobenie skalárom
- násobenie skalárom  ,
,
kde,\pmb b=(b_1, b_2) \in V_2(\mathbb R)") sú ľubovoľné usporiadané dvojice reálnych čísel. Ukážte, že
množina
sú ľubovoľné usporiadané dvojice reálnych čísel. Ukážte, že
množina ") spolu s operáciami
spolu s operáciami  je 2-rozmerný vektorový priestor. Nájdite aspoň jednu jeho bázu.
je 2-rozmerný vektorový priestor. Nájdite aspoň jednu jeho bázu.
Majme množinu
všetkých usporiadaných dvojíc reálnych čísel a operácie:
- sčítanie po zložkách.
- násobenie skalárom ,
kde
sú ľubovoľné usporiadané dvojice reálnych čísel. Ukážte, že
množina spolu s operáciami je 2-rozmerný vektorový priestor. Nájdite aspoň jednu jeho bázu.
Poznámky.
-
Vektorový priestor
= \lbrace{(x, y); x, y \in \mathbb R}\rbrace") je reprezentovaný množinou všetkých orientovaných úsečiek,
ktoré sú určené ľubovoľnou usporiadanou dvojicou bodov v klasickej euklidovskej rovine.
je reprezentovaný množinou všetkých orientovaných úsečiek,
ktoré sú určené ľubovoľnou usporiadanou dvojicou bodov v klasickej euklidovskej rovine. -
Ak využijeme pravouhlý súradnicový systém s osami
 a počiatkom
a počiatkom  , tak jedno z umiestnení
vektora
, tak jedno z umiestnení
vektora ") môžeme znázorniť ako orientovanú úsečku
môžeme znázorniť ako orientovanú úsečku  , kde bod
, kde bod  má
súradnice
má
súradnice ![\small [a_1, a_2]](https://lms.umb.sk/filter/tex/pix.php/a8c5e147880c19b717c06f75af48db7b.png "\small [a_1, a_2]") . Všimnite si, že budeme rozlišovať zápis usporiadanej dvojice (okrúhle zátvorky) a súradnice bodu v
rovine (hranaté zátvorky).
. Všimnite si, že budeme rozlišovať zápis usporiadanej dvojice (okrúhle zátvorky) a súradnice bodu v
rovine (hranaté zátvorky). - V stredoškolskej matematike sa vektor priamo definuje ako orientovaná úsečka so šípkou smerujúcou od počiatku
![\small [0, 0]](https://lms.umb.sk/filter/tex/pix.php/387fd1febbdc2a38e9bb571f79ffc7ae.png "\small [0, 0]") súradnicového systému k
bodu
súradnicového systému k
bodu ![\small [a_1, a_2]](https://lms.umb.sk/filter/tex/pix.php/0289645246eb3d04427ee645350dd26c.png "\small [a_1, a_2]") . Šípkou sa označuje “orientácia” vektora
. Šípkou sa označuje “orientácia” vektora  .
. - V písomnom texte budeme vektor označovať symbolom
 .
.
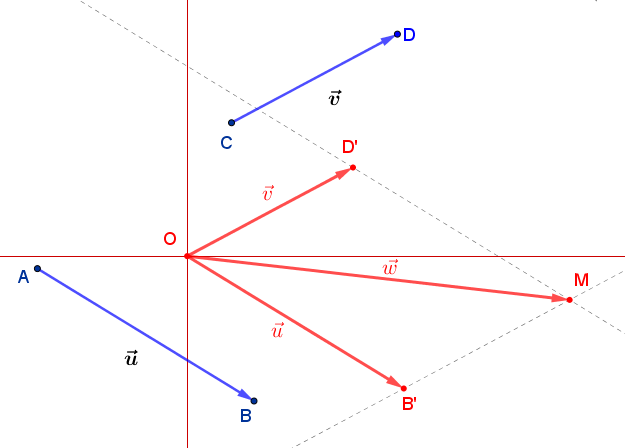
V pravouhlom súradnicovom systéme usporiadané dvojice ,\pmb b=(b_1, b_2) \in V_2(\mathbb R)") reprezentujú tiež dva
body
reprezentujú tiež dva
body  v euklidovskej rovine. Označme
v euklidovskej rovine. Označme  . Potom vektor
. Potom vektor  je zrejme súčtom vektorov
je zrejme súčtom vektorov  . Toto tvrdenie vyplýva zo zhodnosti trojuholníkov
. Toto tvrdenie vyplýva zo zhodnosti trojuholníkov  .
Súradnice vektora
.
Súradnice vektora  určeného orientovanou úsečkou
určeného orientovanou úsečkou  , kde
, kde ![\small A = [a_1, a_2], B = [b_1, b_2]](https://lms.umb.sk/filter/tex/pix.php/722953470976b26fb531d9b2cc406b86.png "\small A = [a_1, a_2], B = [b_1, b_2]") určíme ako rozdiely súradníc bodov
určíme ako rozdiely súradníc bodov  tj.
tj. ") . Vytvorili sme operáciu: odčítavanie bodov, pričom:
. Vytvorili sme operáciu: odčítavanie bodov, pričom:
Rozdielom dvoch bodov je vektor.
Vektor určený orientovanou úsečkou môžeme zapísať aj ako
môžeme zapísať aj ako  .
.
reprezentujú tiež dva
body v euklidovskej rovine. Označme . Potom vektor
je zrejme súčtom vektorov . Toto tvrdenie vyplýva zo zhodnosti trojuholníkov .
Súradnice vektora 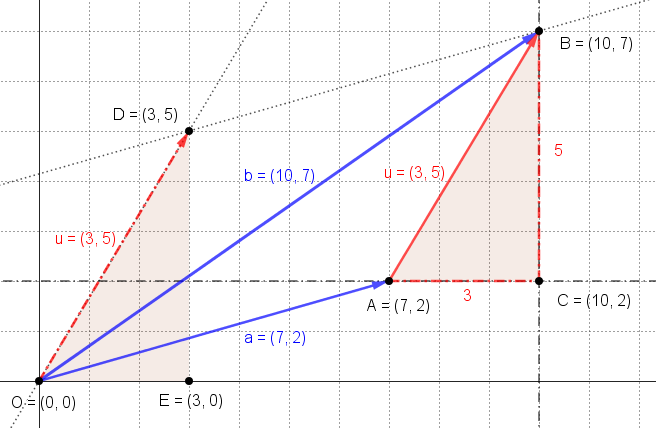 určeného orientovanou úsečkou , kde určíme ako rozdiely súradníc bodov tj. . Vytvorili sme operáciu: odčítavanie bodov, pričom:
určeného orientovanou úsečkou , kde určíme ako rozdiely súradníc bodov tj. . Vytvorili sme operáciu: odčítavanie bodov, pričom:
Rozdielom dvoch bodov je vektor.
Vektor určený orientovanou úsečkou
môžeme zapísať aj ako .
Cvičenie.
Daný je vektorový priestor
![\small W=[(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)]⊂\mathbb{\pmb Z^4_7}](https://lms.umb.sk/filter/tex/pix.php/bd3b10ee76d3e4560ca9d4c3613b338e.png "\small W=[(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)]⊂\mathbb{\pmb Z^4_7}") .
.
Nájdite nejakú bázu priestoru
priestoru  a určite jeho dimenziu, ak
a určite jeho dimenziu, ak
") .
.
Priestor obsahuje štvorice prvkov telesa  zvyškových tried modulo 7.
zvyškových tried modulo 7.
Daný je vektorový priestor
.
Nájdite nejakú bázu
priestoru a určite jeho dimenziu, ak
.
Priestor
obsahuje štvorice prvkov telesa zvyškových tried modulo 7.
Poznámka k cvičeniu.
Zápis hovorí, že súradnice vektora  voči kanonickej báze sú
voči kanonickej báze sú ") .
Súradnice vektora voči kanonickej báze sú koeficienty lineárnej kombinácie vektorov kanonickej bázy dávajúcej vektor , tj.
.
Súradnice vektora voči kanonickej báze sú koeficienty lineárnej kombinácie vektorov kanonickej bázy dávajúcej vektor , tj.
+2⋅(0,1,0,0)+1⋅(0,0,1,0)+1⋅(0,0,0,1)= (1,2,1,1)") .
.
Súradnice vektora voči kanonickej báze predstavujú priamo zložky") vektora .
vektora .
Zápis
hovorí, že súradnice vektora voči kanonickej báze sú .
Súradnice vektora voči kanonickej báze sú koeficienty lineárnej kombinácie vektorov kanonickej bázy dávajúcej vektor , tj.
.
Súradnice vektora voči kanonickej báze predstavujú priamo zložky
vektora .
Riešenie.
- Máme nájsť bázu vektorového priestoru , ktorý je daný ako lineárny obal množiny generátorov
![\small [(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)]](https://lms.umb.sk/filter/tex/pix.php/d31c0a1c182e55949ca3d63120bfc751.png "\small [(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)]") .
.
Aby množina vektorov bola bázou, musí byť ešte lineárne nezávislá. - Ak teda nájdeme bázu
 musí pre súradnice vektora
musí pre súradnice vektora  platiť
platiť
=x_1⋅\pmb b_1+x_2⋅\pmb b_2+x_3⋅\pmb b_3+x_4⋅\pmb b_4") .
.
Z tejto vektorovej rovnice vypočítame súradnice . Najskôr treba upraviť maticu
. Najskôr treba upraviť maticu
")
na trojuholníkový tvar (Pozor, pracujeme nad telesom resp. poľom zvyškových tried modulo 7!)
Po prvej iterácii ") dostanme
dostanme
") .
.
Urobte ešte dve iterácie tak, aby ste dostali maticu
") .
.
- Hodnosť matice je rovná 2, preto pre lineárny obal platí
![\small [(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)] =[(6,1,0,2),(0,5,4,5)]](https://lms.umb.sk/filter/tex/pix.php/68e5861d87aae11fa845fd68ef4e5232.png "\small [(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)] =[(6,1,0,2),(0,5,4,5)]") .
.
Dimenzia je rovná 2 a aspoň jedna báza je určená lineárne nezávislou množinou vektorov,(0,5,4,5)\right\rangle")
- Určte súradnice vektora
") v tejto báze. Výpočet súradníc nájdete Tu.
v tejto báze. Výpočet súradníc nájdete Tu.
Veta - existencia bázy.
Každý netriviálny konečno generovaný vektorový priestor má aspoň jednu konečnú bázu.
Každý netriviálny konečno generovaný vektorový priestor má aspoň jednu konečnú bázu.
Z vlastností hodnosti matíc ľahko odvodíme tvrdenie. Dôkaz nájdete napríklad v práci [Hasek:Linearni algebra a geometrie, str. 45-46].
\)
Súradnice v báze
- Bázu vektorového priestoru
") tvorí ľubovoľná -tica lineárne nezávislých vektorov
tvorí ľubovoľná -tica lineárne nezávislých vektorov  .
. - Bázu , ktorú tvoria -tice reálnych čísel
,\vec{e_2}=(0,1,0,...,0), ...,\vec{e_n}=(0,0,...,1))") ,
,
budeme nazývať jednotková (ortonormálna) báza. Dokážte, že vektory sú nezávislé.
sú nezávislé.
- Ľubovoľný vektor
: \vec v=(v_1,v_2,...,v_n") je lineárnou kombináciou vektorov
je lineárnou kombináciou vektorov  , lebo platí
, lebo platí
 =v_1 \cdot (1,0,...,0) \oplus v_2 \cdot (0,1,0,...,0) \oplus v_n \cdot (0,0,...,1)")
Definícia.
Nech je jednotková báza a  je iná báza vektorového
priestoru .
je iná báza vektorového
priestoru .
Nech
je jednotková báza a je iná báza vektorového
priestoru .
- Čísla
 nazývame súradnice vektora
nazývame súradnice vektora  v jednotkovej báze
v jednotkovej báze ") a zapisujeme ako usporiadanú n-ticu čísel
a zapisujeme ako usporiadanú n-ticu čísel}=v_1 \cdot (1,0,...,0) \oplus v_2 \cdot (0,1,0,...,0) \oplus v_n \cdot (0,0,...,1)") .
. - Súradnice
 v báze budeme zapisovať pomocou dolného indexu
v báze budeme zapisovať pomocou dolného indexu
}_{({a_1},{a_2}, ...,{a_n} )}=w_1 \cdot \vec{a_1} \oplus w_2 \cdot\vec{a_2} \oplus ...\oplus w_n \cdot \vec{a_n}") .
.
Príklad.
- Nech
,\;\vec b(2, 3, 4),\;\vec c (1, 2, 3))") je báza priestoru
je báza priestoru ") .
Nájdite vektor vo , ktorého súradnice vzhľadom k báze
.
Nájdite vektor vo , ktorého súradnice vzhľadom k báze  sú
sú ") .
. - ♥ Nájdite súradnice vektora
") vzhľadom k báze .
vzhľadom k báze .
Riešenie.
- Zrejme
.(1, 1, 2) + 3(2, 3, 4) + 2.(1, 2, 3) = (7, 12, 16)") .
.
Toto sú súradnice vektora vzhľadom k jednotkovej báze. Je dôležité dodržať poradie prvkov bázy . - Určiť súradnice vzhľadom k báze znamená vektor
 vyjadriť ako lineárnu kombináciu prvkov bázy .
Opäť treba dať pozor na poradie prvkov bázy. Musíme nájsť
vyjadriť ako lineárnu kombináciu prvkov bázy .
Opäť treba dať pozor na poradie prvkov bázy. Musíme nájsť  , pre ktoré platí:
, pre ktoré platí:
( i) + s.(2, 3, 4) + t.(1, 2, 3)") resp.
resp.
( ii): = r.(1, 1, 2) + s.(2, 3, 4) + t.(1, 2, 3)") .
.
Úlohu môžeme riešiť ako sústavu rovníc (vyriešte úlohu týmto spôsobom).
(iii):
alebo rovnosť (ii) prepíšeme na maticový tvar (vektory bázy zapisujeme do stĺpcov! Prečo?) takto:
(iv): \cdot \left(\begin{array}{ccc} 5 \\ -1 \\ 9 \end{array}\right) =
\left(\begin{array}{ccc} 1&2&1 \\ 1&3&2 \\ 2&4&3\end{array}\right) \cdot \left(\begin{array}{ccc} r \\ s \\ t \end{array}\right)")
Vyjadriť vektor^T") (transponovaný zápis vektora) môžeme tak, že obe strany rovnice (iv) vynásobíme zľava inverznou maticou
(transponovaný zápis vektora) môžeme tak, že obe strany rovnice (iv) vynásobíme zľava inverznou maticou
") .
.
Inverznú maticu určíme napríklad pomocou programu GeoGebra, otvorte si applet "inverzná matica" Tu. Po vynásobení zľava obidvoch strán rovnice (iv) dostaneme
 \cdot \left(\begin{array}{ccc} 5 \\ -1 \\ 9 \end{array}\right) = \left(\begin{array}{ccc} r \\ s \\ t \end{array}\right)") .
.
Riešením je vektor^T =(16, -5, -1)^T") . Otvorte si výpočty v GeoGebre
Tu.
. Otvorte si výpočty v GeoGebre
Tu.
Nasledujúci applet demonštruje určenie súradníc vektora ") v báze
v báze  ;(1,2,1);(-1, 1,0)") Riešením sú súradnice
Riešením sú súradnice ") . Vypočítajte ich pomocou maticového tvaru, pričom využite program Matrix calculator.
. Vypočítajte ich pomocou maticového tvaru, pričom využite program Matrix calculator.
v báze
Riešením sú súradnice 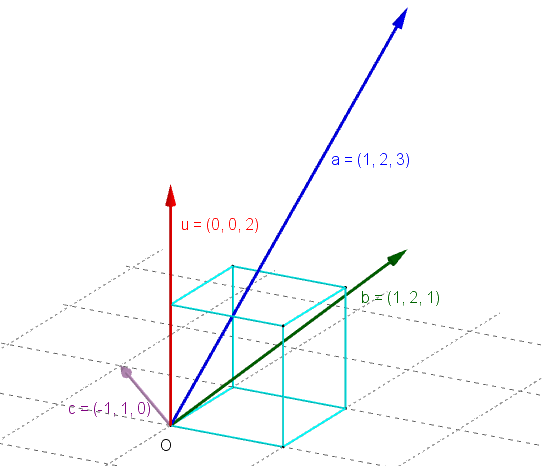 . Vypočítajte ich pomocou maticového tvaru, pričom využite program Matrix calculator.
. Vypočítajte ich pomocou maticového tvaru, pričom využite program Matrix calculator.
♥ Príklad.
Je dané lineárne zobrazenie , ktoré jednotkovú bázu
, ktoré jednotkovú bázu ") zobrazí na bázu
zobrazí na bázu ,\;\vec b(2, 3, 4),\;\vec c (1, 2, 3))") priestoru . Nájdite obraz
priestoru . Nájdite obraz ") vektora
vektora ") v tomto zobrazení.
v tomto zobrazení.
Je dané lineárne zobrazenie
, ktoré jednotkovú bázu zobrazí na bázu priestoru . Nájdite obraz vektora v tomto zobrazení.
Poznámka
Nech sú vektorové priestory nad telesom
sú vektorové priestory nad telesom  . Zobrazenie
. Zobrazenie  sa nazýva lineárne zobrazenie, ak je splnené nasledovné:
sa nazýva lineárne zobrazenie, ak je splnené nasledovné:
&\varphi(\vec u+\vec v)=\varphi(\vec u)+\varphi(\vec v)\\(\textrm{ii})&\varphi(\alpha\cdot\vec u)=\alpha\cdot\varphi(\vec u)\end{array}")
kde a
a  .
.
Nech
sú vektorové priestory nad telesom . Zobrazenie sa nazýva lineárne zobrazenie, ak je splnené nasledovné:
kde
a .
Riešenie.
Vektor vyjadríme ako lineárnu kombináciu  vektorov jednotkovej bázy. Keďže zobrazenie zobrazenie
vektorov jednotkovej bázy. Keďže zobrazenie zobrazenie  je lineárne, tak musí platiť
je lineárne, tak musí platiť

![\small =\varphi[ 5\vec{e_1})-1(\vec{e_2})+9(\vec{e_3}) ]](https://lms.umb.sk/filter/tex/pix.php/cd03d29993f1d054825e7f80121467a8.png "\small =\varphi[ 5\vec{e_1})-1(\vec{e_2})+9(\vec{e_3}) ]")
![\small = \varphi[5.(1,0,0) + (-1)(0,1,0) + 9.(0,0, 1)]](https://lms.umb.sk/filter/tex/pix.php/915591b915a760ee30ed194304ba7e21.png "\small = \varphi[5.(1,0,0) + (-1)(0,1,0) + 9.(0,0, 1)]")
-1\varphi(\vec{e_2})+9\varphi(\vec{e_3})") .
.
Po úprave dostaneme:
 -1.(2, 3, 4) + 9.(1, 2, 3)") .
.
Rovnosť prepíšeme do maticového tvaru (vektory bázy zapisujeme do stĺpcov!) takto:
= \left(\begin{array}{ccc} 1&2&1 \\ 1&3&2 \\ 2&4&3\end{array}\right) \cdot \left(\begin{array}{ccc} 5 \\ -1 \\ 9 \end{array}\right)") .
.
Riešením je vektor =(12, 20, 33)^T") .
.
Vektor
vyjadríme ako lineárnu kombináciu vektorov jednotkovej bázy. Keďže zobrazenie zobrazenie je lineárne, tak musí platiť
.
Po úprave dostaneme:
.
Rovnosť prepíšeme do maticového tvaru (vektory bázy zapisujeme do stĺpcov!) takto:
.Riešením je vektor
. \)
Skalárny súčin
Definícia, vlastnosti (zopakovanie z Lineárnej algebry).
Definícia.
Nech") je vektorový priestor nad poľom reálnych čísel. Zobrazenie (operáciu)
je vektorový priestor nad poľom reálnych čísel. Zobrazenie (operáciu)
 :
: 
nazveme skalárny súčin na") , ak pre každé
, ak pre každé  sú splnené tieto podmienky:
sú splnené tieto podmienky:
Nech
je vektorový priestor nad poľom reálnych čísel. Zobrazenie (operáciu)
:
nazveme skalárny súčin na
, ak pre každé sú splnené tieto podmienky:
-

 \cdot \pmb c=\pmb a \cdot \pmb c + \pmb b \cdot \pmb c")
 \cdot \pmb b = r (\pmb a \cdot \pmb b)")
- pre každý vektor
 je
je  .
.
Poznámky.
- Vlastnosti (ii) a (iii) nastavujú požiadavku na linearitu v prvej zložke. Vlastnosť (i) žiada symetriu, tj linearita prvej zložky sa prenáša do zložky druhej. Tieto vlastnosti má symetrická bilineárna forma. Viac o bilineárnych formách nájdete Tu.
- Vlastnosť (iv) hovorí, že forma musí byť pozitívne definitívna.
- Skalárny súčin na reálnom priestore je teda symetrická pozitívne definitná bilineárna forma na danom priestore.
- Takto definovaný skalárny súčin sa často v literatúre označuje ako vážený skalárny súčin.
- Pre skalárny súčin na reálnom priestore budeme namiesto označenia
 používať len symbol pre násobenie
používať len symbol pre násobenie  alebo symbol usporiadanej dvojice
alebo symbol usporiadanej dvojice ") .
.
Vážený skalárny súčin je oproti „stredoškolskému skalárnemu súčinu“ oveľa všeobecnejší. Stredoškolsky definovaný skalárny súčin (tiež nazývaný aj ako euklidovský skalárny súčin) na priestore ") je zavedený nasledovne. Ak
je zavedený nasledovne. Ak ![\small \pmb a = [a_1, a_2, a_3], \pmb b = [b_1, b_2, b_3]](https://lms.umb.sk/filter/tex/pix.php/cad0163933a5d2adf5e1bcaed21e570d.png "\small \pmb a = [a_1, a_2, a_3], \pmb b = [b_1, b_2, b_3]") , tak
, tak

Presvedčte sa, že stredoškolsky definovaný skalárny súčin spĺňa podmienky uvedené v definícii, že je to symetrická pozitívne definitná bilineárna forma.
Definícia skalárneho súčinu môže mať rôzne podoby. Napríklad na množine spojitých funkcií intervalu ⟨a,b⟩ možno uvažovať skalárny súčin vo forme
= \int_{a}^{b}{f(x)g(x)} dx.")
je zavedený nasledovne. Ak , tak
Presvedčte sa, že stredoškolsky definovaný skalárny súčin spĺňa podmienky uvedené v definícii, že je to symetrická pozitívne definitná bilineárna forma.
Definícia skalárneho súčinu môže mať rôzne podoby. Napríklad na množine spojitých funkcií intervalu ⟨a,b⟩ možno uvažovať skalárny súčin vo forme
Cvičenie.
Ukážte, že operácia definovaná na
definovaná na  takto:
takto:
 .
.
pre![\small \pmb x = [x_1, x_2, x_3], \pmb y = [y_1, y_2, y_3] \in \mathbb R^3](https://lms.umb.sk/filter/tex/pix.php/6c5a6b65e8aa73603a0a02071a6ebf6e.png "\small \pmb x = [x_1, x_2, x_3], \pmb y = [y_1, y_2, y_3] \in \mathbb R^3") spĺňa podmienky skalárneho súčinu.
spĺňa podmienky skalárneho súčinu.
Ukážte, že operácia
definovaná na takto:
.
pre
spĺňa podmienky skalárneho súčinu.
Riešenie.
Dosadením súradníc vektorov![\small \pmb a = [a_1, a_2, a_3], \pmb b = [b_1, b_2, b_3], \pmb c = [c_1, c_2, c_3] \in \mathbb R^3](https://lms.umb.sk/filter/tex/pix.php/0f2b26f65693e348a81b8428fbc61ab7.png "\small \pmb a = [a_1, a_2, a_3], \pmb b = [b_1, b_2, b_3], \pmb c = [c_1, c_2, c_3] \in \mathbb R^3") do definície skalárneho súčinu,
ľahko overíme, že jednotlivé podmienky v definícii sú splnené.
do definície skalárneho súčinu,
ľahko overíme, že jednotlivé podmienky v definícii sú splnené.
Riešenie pomocou bilineárnych foriem nájdete Tu.
Dosadením súradníc vektorov
do definície skalárneho súčinu,
ľahko overíme, že jednotlivé podmienky v definícii sú splnené.
Riešenie pomocou bilineárnych foriem nájdete Tu.
Veta - ďalšie vlastnosti skalárneho súcinu.
Nech je vektorový priestor so skalárnym súčinom, nechaj  . Potom
. Potom
je vektorový priestor so skalárnym súčinom, nechaj . Potom
 = \pmb w . \pmb u+ \pmb w . \pmb v") . Dokážte toto tvrdenie.
. Dokážte toto tvrdenie.
Dôsledok: Pre skalárny súčin platí aj zovšeobecnený distributívny zákon. = r.(\pmb u.\pmb v)")
 . Dokážte tieto tvrdenia.
. Dokážte tieto tvrdenia.
Dôsledok: Pre skalárny súčin platí .
.
Veta - určenie euklidovského skalárneho súčinu.
Nech je ortonormálna báza vektorového priestoru a
nech
je ortonormálna báza vektorového priestoru a
nech , \pmb b = (b_1, b_2, . . . ,b_n)") sú súradnice vektorov
sú súradnice vektorov  v báze
v báze  . Potom
. Potom
 = (a_1.b_1+ a_2.b_2+ . . . +a_n.b_n)") .
.
Nech
je ortonormálna báza vektorového priestoru a
nech sú súradnice vektorov v báze . Potom
.
Dôkaz.
Nech, \pmb b = (b_1\pmb u_1+ b_2.\pmb u_2+ . . . +b_n\pmb u_n)") sú súradnice vektorov v báze . Definujme euklidovský skalárny súčin ako súčin mnohočlenov
sú súradnice vektorov v báze . Definujme euklidovský skalárny súčin ako súčin mnohočlenov
 =\\=a_1.b_1\pmb u_1\pmb u_1+ a_1.b_2\pmb u_1\pmb u_2+ . . . +a_1.b_n\pmb u_1\pmb u_n+\\ +\;a_2.b_1\pmb u_2\pmb u_1+ a_2.b_2\pmb u_2\pmb u_2+ . . . +a_2.b_n\pmb u_2\pmb u_n+\\ +\;... \\ +\;a_n.b_1\pmb u_n\pmb u_1+ a_n.b_2\pmb u_n\pmb u_2+ . . . +a_n.b_n\pmb u_n\pmb u_n}") .
.
Využitím symetrie, distributívnosti a linearity skalárneho súčinu, vzťahov ;
; a využitím komutatívnosti, distributívnosti násobenia a sčítania reálnych čísel dostaneme požadovaný výsledok.
a využitím komutatívnosti, distributívnosti násobenia a sčítania reálnych čísel dostaneme požadovaný výsledok.
Nech
sú súradnice vektorov v báze . Definujme euklidovský skalárny súčin ako súčin mnohočlenov.
Využitím symetrie, distributívnosti a linearity skalárneho súčinu, vzťahov
; a využitím komutatívnosti, distributívnosti násobenia a sčítania reálnych čísel dostaneme požadovaný výsledok.
Vektorový priestor ") s vyššie definovaným skalárnym súčinom nazývame Euklidovský (vektorový) priestor
s vyššie definovaným skalárnym súčinom nazývame Euklidovský (vektorový) priestor
s vyššie definovaným skalárnym súčinom nazývame Euklidovský (vektorový) priestor
\)
Cauchy-Schwarz nerov.
Definície - norma vektora, uhol vektorov na reálnom vektorovom priestore so skalárnym súčinom ") .
.
so skalárnym súčinom .
- Pod normou (veľkosťou) vektora rozumieme druhú odmocninu skalárneho súčinu vektora
 samého so sebou.
Normu vektora budeme označovať
samého so sebou.
Normu vektora budeme označovať  , teda
, teda

- Uhlom nenulových vektorov
") rozumieme číslo
rozumieme číslo  , pre ktoré platí
, pre ktoré platí
}{∥\pmb u∥ .∥\pmb v||}}") ,
,
Ku korektnosti definície je nutné ukázať, že}{∥\pmb u∥ .∥\pmb v∥}} \leq \small {1}") . Dokážte to s využitím Cauchy-Schwarzovej nerovnosti.
. Dokážte to s využitím Cauchy-Schwarzovej nerovnosti.
Tvrdenia.
- Cauchy-Schwarzova nerovnosť
Pre ľubovoľné dva vektory platí
| ≤ ∥\pmb u∥ . ∥\pmb v∥") ,
,
pričom rovnosť nastane práve vtedy, keď vektory sú lineárne závislé (tj. jeden z nich je násobkom toho druhého).
sú lineárne závislé (tj. jeden z nich je násobkom toho druhého). - Nulový vektor
 je kolmý na ľubovoľný vektor
je kolmý na ľubovoľný vektor  .
Vektory štandardnej bázy
.
Vektory štandardnej bázy  sú navzájom kolmé.
sú navzájom kolmé.
Dôkaz - Cauchy-Schwarzovej nerovnosti.
- Pre lineárne závislé vektory musí existovať nenulové reálne číslo
 , pre ktoré platí
, pre ktoré platí  .
Ak sú vektory nezávislé tak, pre každé nenulové reálne číslo vektor
.
Ak sú vektory nezávislé tak, pre každé nenulové reálne číslo vektor  je nenulový. Zrejme druhá mocnina jeho normy je
je nenulový. Zrejme druhá mocnina jeho normy je  a nie je rovná nule. Podľa definície normy rozpíšeme ľavú stranu nerovnosti ako
a nie je rovná nule. Podľa definície normy rozpíšeme ľavú stranu nerovnosti ako
.(\pmb u-a\pmb v)>0")
Skalárny súčin je symetrický a distributívny, preto po úprave dostaneme kvadratickú nerovnicu .-2a.(\pmb u.\pmb v)+a^2(\pmb v.\pmb v)>0")
Ľavá strana nerovnice predstavuje kvadratický trojčlen v premennej, ktorý nemá reálne korene (pre ľubovoľnú hodnotu je trojčlen > 0).
Jej diskriminant musí byť záporný, teda platí
![\small D= [−2(\pmb u.\pmb v)]^2−4∥\pmb u∥^2∥\pmb v∥|^2 < 0](https://lms.umb.sk/filter/tex/pix.php/5d1d6a6c21a1552053a44c66b0d48907.png "\small D= [−2(\pmb u.\pmb v)]^2−4∥\pmb u∥^2∥\pmb v∥|^2 < 0")
Odtiaľ už ľahko dostaneme![\small [−2(\pmb u.\pmb v)]^2 < 4∥\pmb u∥^2∥\pmb v∥^2](https://lms.umb.sk/filter/tex/pix.php/142c3980a2c61a0d1fb666f35dec9692.png "\small [−2(\pmb u.\pmb v)]^2 < 4∥\pmb u∥^2∥\pmb v∥^2") a po odmocnení
a po odmocnení | < ∥\pmb u∥.∥\pmb v∥") .
.
- Dôkaz pre lineárne závislé vektory prenechávame čitateľovi. Zrejme bude platiť rovnosť strán.
Tvrdenia.
Nech je reálny vektorový priestor so skalárnym súčinom.
Nech
je reálny vektorový priestor so skalárnym súčinom.
- Trojuholníková nerovnosť.
: ∥\pmb u+\pmb v∥ \leq ∥\pmb u∥∥\pmb v∥") ,
,
pričom rovnosť nastane práve vtedy, keď vektory sú lineárne závislé (tj. jeden z nich je násobkom toho druhého). - Pytagorova veta.
: ∥\pmb u+\pmb v∥^2 = ∥\pmb u∥^2+∥\pmb v∥^2") .
. - Kosínusová veta.
Pre ľubovoľné dva vektory,
ktorých uhol je platí
 .
.
Dôkazy.
- Na úrovni VŠ použite Cauchy-Schwarzovu nerovnosť. Podrobné dôkazy nájdete v
"Sbírce řešených úloh Katedřy didaktiky fyziky Matematicko-fyzikální fakulty UK Praha". Tu.
Vezmite normu (druhú mocninu normy) na ľavej strane nerovnosti a prepíšte ju podľa definície pomocou skalárneho súčinu. Výraz zjednodušte vďaka linearite a symetrii skalárneho súčinu.Napr. pre trojuholníkovú nerovnosť upravte na:+∥\pmb v∥^2") .
.
Ďalej aplikujte nerovnosť , následne použite Cauchy-Schwarzovú nerovnosť a nakoniec odmocnite.
, následne použite Cauchy-Schwarzovú nerovnosť a nakoniec odmocnite.
- Na úrovni SŠ použite Cauchy-Schwarzovu nerovnosť ale pre prípad vektorového priestoru so štandardnou ortonormálnou
bázou
,e_2=(0,1,0),e_3=(0,0,1) \right\rangle") . Pre vektory
. Pre vektory , \pmb v=(v_1,v_2v_3) \in V(\mathbb R)") je skalárny súčin definovaný ako
je skalárny súčin definovaný ako
=u_1v_1+u_2v_2+u_3v_3") .
.
Cvičenie.
- Skalárny súčin je definovaný na takto:
 = 3x_1 y_1+2x_2 y_2+x_3 y_3") .
.
pre. Určte číslo  tak,
aby vektory
tak,
aby vektory ![\small \pmb x = [a-1, 3, a+1], \pmb y = [-4, -a, 3a]](https://lms.umb.sk/filter/tex/pix.php/751ef74e6076cb8898fad9ed0f878e3e.png "\small \pmb x = [a-1, 3, a+1], \pmb y = [-4, -a, 3a]") boli na seba kolmé v zmysle definície kolmosti vektorov. Aký reálny uhol zvierajú tieto vektory v euklidovskom 3-rozmernom priestore? (Ukážte, že táto operácia spĺňa podmienky skalárneho súčinu).
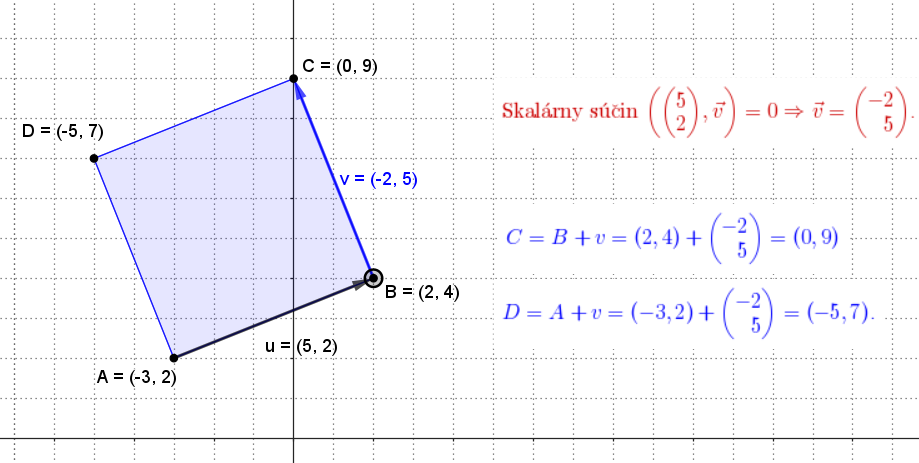
boli na seba kolmé v zmysle definície kolmosti vektorov. Aký reálny uhol zvierajú tieto vektory v euklidovskom 3-rozmernom priestore? (Ukážte, že táto operácia spĺňa podmienky skalárneho súčinu). - Body
![\small A[-3,2],B[2,4]](https://lms.umb.sk/filter/tex/pix.php/6c440150c22d1ac8d7c3e62d5d7e5753.png "\small A[-3,2],B[2,4]") sú susedné vrcholy štvorca. Pomocou skalárneho súčinu určte súradnice jeho zvyšných vrcholov.
sú susedné vrcholy štvorca. Pomocou skalárneho súčinu určte súradnice jeho zvyšných vrcholov.
Riešenie.
- Pomocou bilineárnych foriem ukážte, že operácia spĺňa podmienky skalárneho súčinu (použitie bilineárnych foriem na zdôvodnenie tvrdenia nájdete Tu).
Ak vektory majú byť na seba kolmé, tak ich skalárny súčin sa musí rovnať nule. Po dosadení dostaneme
=3x_1y_1+2x_2y_2+x_3y_3=3(a-1)(-4)+2⋅3(-a)+(a+1)3a=3a^2-15a+12.")
Riešením kvadratickej rovnice sú čísla . Pozrite si grafické riešenie
Tu.
. Pozrite si grafické riešenie
Tu. -
Pre skalárny súčin platí
,\vec{v} \right) =0⇒\vec{v}=(2,-5),||\vec{v}||-1") .
.
Definícia - ortogonálne vektory
Nech je reálny vektorový priestor so skalárnym súčinom. Vektory ") nazývame navzájom ortogonálne resp. ortonormálne, ak
nazývame navzájom ortogonálne resp. ortonormálne, ak =0") pre
pre  resp. ak naviac platí
resp. ak naviac platí  .
.
Nech
je reálny vektorový priestor so skalárnym súčinom. Vektory nazývame navzájom ortogonálne resp. ortonormálne, ak pre resp. ak naviac platí .
\)
Schmidt ortogon. proces
Nech je - rozmerný vektorový priestor so skalárnym súčinom ") a nech je daná množina
a nech je daná množina  lineárne nezávislých vektorov tohto konečno rozmerného priestoru (
lineárne nezávislých vektorov tohto konečno rozmerného priestoru ( ).
).
je - rozmerný vektorový priestor so skalárnym súčinom a nech je daná množina lineárne nezávislých vektorov tohto konečno rozmerného priestoru ().
Definícia.
Schmidtov ortogonalizačný proces je proces, ktorým z množiny lineárne nezávislých vektorov vytvárame ortonormálnu bázu - rozmerného
vektorového priestoru .
Schmidtov ortogonalizačný proces je proces, ktorým z množiny
lineárne nezávislých vektorov vytvárame ortonormálnu bázu - rozmerného
vektorového priestoru .
Poznámka.
Ortonormálna báza sa vyznačuje vlastnosťou, že jej vektory majú normovanú jednotkovú dĺžku a všetky sú navzájom kolmé (ortogonálne).
Existenciu takejto ortonormálnej bázy zabezpečuje Veta - Schmidtov ortogonalizačný proces.
Ortonormálna báza sa vyznačuje vlastnosťou, že jej vektory majú normovanú jednotkovú dĺžku a všetky sú navzájom kolmé (ortogonálne).
Existenciu takejto ortonormálnej bázy zabezpečuje Veta - Schmidtov ortogonalizačný proces.
Celý proces vytvárania ortonormálnej bázy možno popísať algoritmicky/rekurentne takto:
- V prvom kroku Schmidtovho ortogonalizačného procesu sa za základ stanoví prvý vektor z danej množiny vektorov . Podľa tohto vektora sa odvíja orientácia
zvyšných.
- Ďalším
 -tym krokom je samotná ortogonalizácia -teho vektora. Nasledujúci -ty vektor určíme ako lineárnu
kombináciu -teho vektora z danej množiny vektorov a už
-tym krokom je samotná ortogonalizácia -teho vektora. Nasledujúci -ty vektor určíme ako lineárnu
kombináciu -teho vektora z danej množiny vektorov a už ") vytvorených vektorov.
vytvorených vektorov. - Nakoniec prevedieme normalizáciu vektorov. Pre zjednodušenie výpočtov sa vektory normalizujú až na koniec procesu.
Veta - Schmidtov ortogonalizačný proces.
Nech") je vektorový priestor so skalárnym súčinom
je vektorový priestor so skalárnym súčinom
") a nech
a nech  sú lineárne nezávislé vektory. Potom existujú
ortonormálne vektory
sú lineárne nezávislé vektory. Potom existujú
ortonormálne vektory  , pre ktoré platí
, pre ktoré platí
![\small [{\pmb {e_1}, \pmb {e_2}, \cdot \cdot \cdot, \pmb {e_i}}] = [{\pmb {u_1}, \pmb {u_2}, \cdot \cdot \cdot, \pmb {u_i}}], ∀i ∈ {1, 2, . . . , k}](https://lms.umb.sk/filter/tex/pix.php/e1015ffff519181270c72c15a0dc8bcc.png "\small [{\pmb {e_1}, \pmb {e_2}, \cdot \cdot \cdot, \pmb {e_i}}] = [{\pmb {u_1}, \pmb {u_2}, \cdot \cdot \cdot, \pmb {u_i}}], ∀i ∈ {1, 2, . . . , k}")
Nech
je vektorový priestor so skalárnym súčinom
a nech sú lineárne nezávislé vektory. Potom existujú
ortonormálne vektory , pre ktoré platí
Dôkaz.
A. Proces ortogonalizácie.
A. Proces ortogonalizácie.
- Najprv určíme prvý vektor, pričom položíme
 .
. - Druhý vektor určíme ako lineárnu kombináciu
 , pričom podľa predpokladu platí
, pričom podľa predpokladu platí =0") .
Po skalárnom vynásobení
rovnice vektorom
.
Po skalárnom vynásobení
rovnice vektorom  dostaneme riešenie
dostaneme riešenie
 }{(\pmb e_1,\pmb e_1)}") .
.
Po dosadení dostaneme riešenie
 }{(\pmb e_1,\pmb e_1)}\small \pmb e_1") .
. - Pre tretí vektor bude lineárna kombinácia v tvare
 , pričom platí
, pričom platí =0;(\pmb e_2,\pmb e_3)=0") .
Po skalárnom vynásobení rovnice postupne vektormi
.
Po skalárnom vynásobení rovnice postupne vektormi  dostaneme riešenie
dostaneme riešenie
 }{(\pmb e_1,\pmb e_1)}") ;
;  }{(\pmb e_2,\pmb e_2)}") .
. - Pomocou matematickej indukcie dokážeme, že pre ďalšie vektory platia vzťahy
 }{(\pmb e_1,\pmb ;e_1)}} \small \pmb e_1-\large\frac{(\pmb e_2,\pmb u_k) }{(\pmb e_2,\pmb e_2)} \small \pmb e_2-···-\large\frac{(\pmb e_{k-1},\pmb u_k) }{(\pmb e_{k-1},\pmb e_{k-1})} \small \pmb e_{k-1}") .
. - Teraz stačí len "znormovať" tieto vektory.
Dostaneme jednotkové vektory

Cvičenie.
- Vo vektorovom priestore usporiadaných trojíc reálnych čísel sú dané vektory
,\pmb u_2=(0,1,2),\pmb u_3=(1,1,0)") . Vykonajte Schmidtov ortogonalizačný proces.
. Vykonajte Schmidtov ortogonalizačný proces. - Určte aspoň jednu ortonormálnu bázu vektorového podpriestoru
") , ktorý je určený (smerom-rovinou)
, ktorý je určený (smerom-rovinou)  .
.
Riešenie.
- Zvoľme prvý vektor ortogonálnej bázy
") (zrejme nie je jednotkový, jeho normalizáciu urobíme v závere riešenia). Druhý
vektor
(zrejme nie je jednotkový, jeho normalizáciu urobíme v závere riešenia). Druhý
vektor  určíme zo vzťahu
určíme zo vzťahu
(k)") ,
,
kde") . Rovnicu (k) skalárne vynásobíme vektorom
. Rovnicu (k) skalárne vynásobíme vektorom ") . Podľa predpokladu v Schmidtovom ortogonalizačnom procese musia
byť vektory
. Podľa predpokladu v Schmidtovom ortogonalizačnom procese musia
byť vektory  na seba kolmé, teda musí pre ich skalárny súčin platiť rovnosť
na seba kolmé, teda musí pre ich skalárny súčin platiť rovnosť ,\pmb b_2)=0") . Zároveň platí
. Zároveň platí
,(1,1,0))=2") . Po dosadení do (k) môžeme určiť/vypočítať koeficient
. Po dosadení do (k) môžeme určiť/vypočítať koeficient
 , odkiaľ dostaneme pre vektor
, odkiaľ dostaneme pre vektor
") .
.
Tretí vektor určíme zo vzťahu
 + r(1,1,0)+s(-1,1,4)")
(zobrali sme 2-násobok druhého vektora ). Ľahko nahliadneme, že
). Ľahko nahliadneme, že  , odkiaľ
, odkiaľ ") . Zrejme
vektory
. Zrejme
vektory  sú na seba kolmé a stačí ich znormovať.
sú na seba kolmé a stačí ich znormovať.
V prípade, že by sme zvolili") dostali by sme bázu
dostali by sme bázu ,(-1,4,5), (3,2,-1)") , ktorá je tiež ortogonálna.
Teda výsledná báza závisí od voľby poradia vektorov .
, ktorá je tiež ortogonálna.
Teda výsledná báza závisí od voľby poradia vektorov .
- Stačí určiť smerové vektory danej roviny, ktoré patria do vektorového priestoru určeného danou rovinou (do jej zamerania). Sú to napríklad vektory
,\vec v=(1,2,1)") .
Potom realizujte Schmidtov ortogonalizačný proces a utvorte ortogonálnu bázu skúmaného vektorového podpriestoru.
.
Potom realizujte Schmidtov ortogonalizačný proces a utvorte ortogonálnu bázu skúmaného vektorového podpriestoru.
Preštudujte si študijný text o kolmých vektorových podpriestoroch v práci:
Monoszová, G.: Analytická geometria 2 - Kapitola III. FPV UMB B. Bystrica. Časť II. 2. Totalne kolmé vektorové priestory. Kolmé vektorové priestory.
Monoszová, G.: Analytická geometria 2 - Kapitola III. FPV UMB B. Bystrica. Časť II. 2. Totalne kolmé vektorové priestory. Kolmé vektorové priestory.
\)
Afinný n-rozmerný priestor
Pri syntetickom prístupe v geometrii sme vychádzame z euklidovského priestoru podľa Euklidových Základov, v ktorom sa základné geometrické útvary (bod, priamka) nedefinovali.
Vedeli sme jednoznačne rozhodnúť o pravdivosti výrokov typu: Bod patrí alebo nepatrí danému útvaru.
Tento prístup z matematického hľadiska predstavuje zásadný problém: Nevieme jasne zadefinovať, čo je to (bodová) množina.
Neskôr (aj historicky) sme zaviedli pojmy:

v afinnom priestore predstavuje posunutý bod o vektor
o vektor  .
.
V tejto kapitole budeme využívať prevažne štandardnú bázu}") , ktorej vektory sú navzájom kolmé a majú
jednotkovú dĺžku. Takejto báze tiež hovoríme ortonormálová báza.
, ktorej vektory sú navzájom kolmé a majú
jednotkovú dĺžku. Takejto báze tiež hovoríme ortonormálová báza.
Neskôr (aj historicky) sme zaviedli pojmy:
- vektor a vektorový priestor ako štruktúru s predpísanými binárnymi operáciami
- štandardná báza vektorového priestoru

- súradnice vektora
") v štandardnej báze.
Tieto pojmy nám umožňujú zaviesť afinný priestor axiomaticky pomocou vektorového priestoru.
v štandardnej báze.
Tieto pojmy nám umožňujú zaviesť afinný priestor axiomaticky pomocou vektorového priestoru.
v afinnom priestore predstavuje posunutý bod
o vektor .
V tejto kapitole budeme využívať prevažne štandardnú bázu
, ktorej vektory sú navzájom kolmé a majú
jednotkovú dĺžku. Takejto báze tiež hovoríme ortonormálová báza.
Afinný priestor nad poľom  je trojica
je trojica ") , kde
, kde
je trojica , kde
 je množina bodov.
je množina bodov. je vektorový priestor nad poľom .
je vektorový priestor nad poľom . je zobrazenie s vlastnosťami:
je zobrazenie s vlastnosťami:
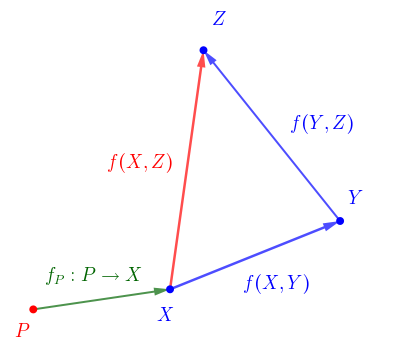
(AP1)+f(Y,Z)=f(X,Z)")
(AP2)")
je bijektívne zobrazenie. Pozrite si prácu (príklad 2) Tu.
 Otvorte si applet
Tu.
Otvorte si applet
Tu.
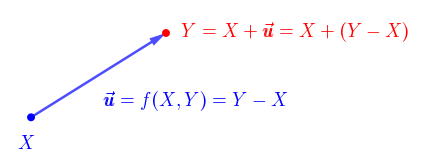
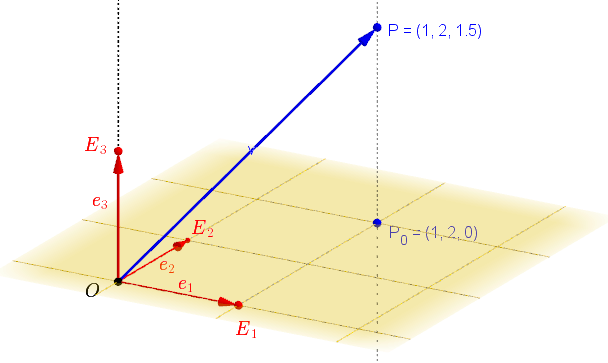
Ak usporiadaná dvojica bodov ") predstavuje umiestnenie vektora
predstavuje umiestnenie vektora  , tak vektor môžeme vyjadriť
ako
, tak vektor môžeme vyjadriť
ako  , čo predstavuje zobrazenie
, čo predstavuje zobrazenie
") .
.
Podmienka (AP2) sa niekedy uvádza takto:
(AP2') existuje práve jeden
bod
existuje práve jeden
bod  taký, že
taký, že  .
.
(AP2'') taký, že
taký, že  .
.
V tejto kapitole budeme pracovať len s reálnym afinným priestorom nad telesom (poľom) reálnych čísel. Fundamentálnou vlastnosťou
afinného bodového priestoru je axiomatické tvrdenie:
predstavuje umiestnenie vektora , tak vektor môžeme vyjadriť
ako , čo predstavuje zobrazenie
.
Podmienka (AP2) sa niekedy uvádza takto:
(AP2')
existuje práve jeden
bod taký, že .
(AP2'')
taký, že .
V tejto kapitole budeme pracovať len s reálnym afinným priestorom nad telesom (poľom) reálnych čísel
. Fundamentálnou vlastnosťou
afinného bodového priestoru je axiomatické tvrdenie:
 : Každými dvomi bodmi afinného priestoru je určený vektor, ktorý je daný ich rozdielom.
: Každými dvomi bodmi afinného priestoru je určený vektor, ktorý je daný ich rozdielom.
 Applet hyperbola Tu.
Applet hyperbola Tu.
Vďaka tejto vlastnosti môžeme vyjadriť bod ( v afinnom bodovom priestore ako súčet bodu a vektora
v afinnom bodovom priestore ako súčet bodu a vektora  .
.
v afinnom bodovom priestore ako súčet bodu a vektora .
 : V afinnom priestore platí vlastnost’ (AP2) pre ľubovoľný pevne zvolený bod
: V afinnom priestore platí vlastnost’ (AP2) pre ľubovoľný pevne zvolený bod  ,
t.j.
,
t.j. ") je bijektívne zobrazenie. Stačí si uvedomiť, že
je bijektívne zobrazenie. Stačí si uvedomiť, že  = f(P′, P) + f(P, X))") .
.
Zistite, či usporiadané trojice sú afinným priestorom.
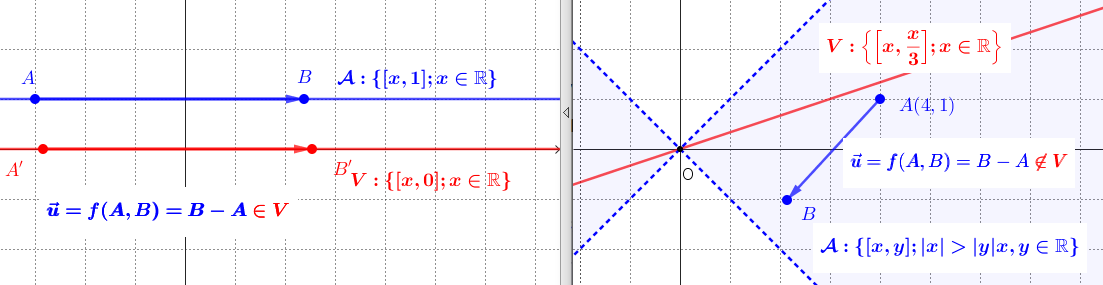
Otvorte si dynamické obrázky: ľavý Tu - príklad afinného priestoru; pravý Tu - nie je afinným priestorom.
sú afinným priestorom.
Otvorte si dynamické obrázky: ľavý Tu - príklad afinného priestoru; pravý Tu - nie je afinným priestorom.
Poznámky.
- Afinný priestor budeme tiež jednoducho označovať
 alebo ako
alebo ako  .
Vektorový priestor prislúchajúci afinnému priestoru
.
Vektorový priestor prislúchajúci afinnému priestoru ") budeme označovať ako
budeme označovať ako ") alebo len .
alebo len . - Vektorovému priestoru hovoríme tiež zameranie afinného priestoru. Afinný priestor, ktorého zameraním je vektorový priestor nad poľom reálnych čísel nazývame reálny afinný priestor alebo aj aritmetický afinný priestor.
- Affinis znamená latinsky príbuzný. Prvý krát tento pojem použil Leonhard Euler (1707-1783) pre označenie vzťahu vzoru a obrazu v zobrazení, ktoré zachováva deliaci pomer (pozri kapitolu Deliaci pomer Tu). Afinná geometria je geometria bez vzdialenosti/miery.
Príklad.
Dané sú množiny (červená)
 \in \mathbb R^3 ; x_1 + x_2 -2x_3 = -5}\rbrace") ,
,
množina (modrá)
 \in {\small\mathbb R^3} ; x_1 + x_2 -2x_3 = 0}\rbrace")
a zobrazenie}") je odčitovanie trojíc reálnych čísel po zložkách.
je odčitovanie trojíc reálnych čísel po zložkách.
Dokážte, že") je afinný priestor nad poľom .
Dynamický obrázok Tu.
je afinný priestor nad poľom .
Dynamický obrázok Tu.
Dané sú množiny (červená)
,
množina (modrá)
a zobrazenie
je odčitovanie trojíc reálnych čísel po zložkách.
Dokážte, že
je afinný priestor nad poľom .
Dynamický obrázok Tu.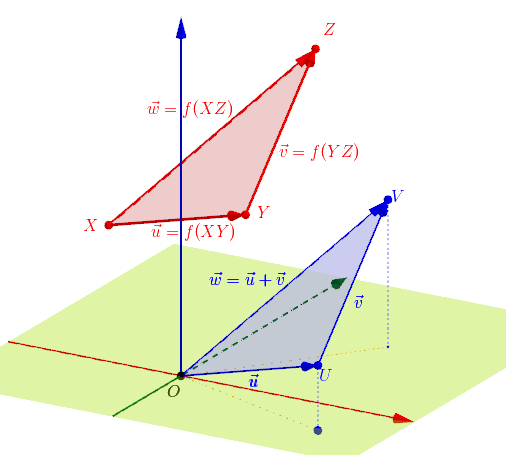
Riešenie.
Pre ľubovoľný bod![\small X[x_1,x_2,x_3] \in \mathcal{A}](https://lms.umb.sk/filter/tex/pix.php/1e32b09cf88a45e990cb4c781e1264a3.png "\small X[x_1,x_2,x_3] \in \mathcal{A}") platí, že
platí, že ") .
.
Pre ľubovoľný bod
platí, že .
- Podmienka (AP1): zo vzťahov
![\small f(X,Y)=\left [x_1-y_1,x_2-y_2,x_3-y_3 \right ] =\left [ x_1-y_1,x_2-y_2, \frac{1}{2} \left\{(x_1-y_1 )+(x_2-y_2 ) \right\} \right ]](https://lms.umb.sk/filter/tex/pix.php/212ddeb0870fc8fd963a34c97efd0b5e.png "\small f(X,Y)=\left [x_1-y_1,x_2-y_2,x_3-y_3 \right ] =\left [ x_1-y_1,x_2-y_2, \frac{1}{2} \left\{(x_1-y_1 )+(x_2-y_2 ) \right\} \right ]")
![\small f(Y,Z)=\left [y_1-z_1,\;y_2-z_2,y_3-z_3 \right ]=\left [y_1-z_1,\;y_2-z_2, \frac{1}{2} \left\{(y_1-z_1 )+(y_2-z_2 )\right\} \right ]](https://lms.umb.sk/filter/tex/pix.php/b8e2befaa385d58e1495d0dda24dd2d8.png "\small f(Y,Z)=\left [y_1-z_1,\;y_2-z_2,y_3-z_3 \right ]=\left [y_1-z_1,\;y_2-z_2, \frac{1}{2} \left\{(y_1-z_1 )+(y_2-z_2 )\right\} \right ]")
dostávame![\small f(X,Z)=\left [ x_1-z_1,x_2-z_2, \frac{1}{2} ((x_1-z_1 )+(x_2-z_2 )) \right ]](https://lms.umb.sk/filter/tex/pix.php/1b18ee33757839b8a6461582719e1a95.png "\small f(X,Z)=\left [ x_1-z_1,x_2-z_2, \frac{1}{2} ((x_1-z_1 )+(x_2-z_2 )) \right ]") ,
,
čo bolo treba ukázať. - Podmienka (AP2): Nech
![\small P=[p_1,p_2, \frac{1}{2} (p_1+p_2+5)]](https://lms.umb.sk/filter/tex/pix.php/09702c0c73bf5072e288f185b849edb3.png "\small P=[p_1,p_2, \frac{1}{2} (p_1+p_2+5)]") je pevne zvolený bod
a
je pevne zvolený bod
a ![\small X=[x_1,x_2, \frac{1}{2} (x_1+x_2+5)], Y=[y_1,y_2, \frac{1}{2} (x_1+x_2+5)]](https://lms.umb.sk/filter/tex/pix.php/b45741f780d3658c11d776d825c1471b.png "\small X=[x_1,x_2, \frac{1}{2} (x_1+x_2+5)], Y=[y_1,y_2, \frac{1}{2} (x_1+x_2+5)]") sú ľubovoľné dva rôzne body.
sú ľubovoľné dva rôzne body.
Potom je∨(x_2 \neq y_2 )") a zrejme aj pre obrazy
a zrejme aj pre obrazy
![\small f(P,X)=\left [p_1-x_1,p_2-x_2,\frac{1}{2} ((p_1-x_1 )+(p_2-x_2 )) \right ]](https://lms.umb.sk/filter/tex/pix.php/63009f454440a8eae526eb94e04d07d7.png "\small f(P,X)=\left [p_1-x_1,p_2-x_2,\frac{1}{2} ((p_1-x_1 )+(p_2-x_2 )) \right ]")
![\small f(P,Y)=\left [ p_1-y_1,p_2-y_2,\frac{1}{2} ((p_1-y_1 )+(p_2-y_2 )) \right ]](https://lms.umb.sk/filter/tex/pix.php/596431e055367812dc5b1a41713657dd.png "\small f(P,Y)=\left [ p_1-y_1,p_2-y_2,\frac{1}{2} ((p_1-y_1 )+(p_2-y_2 )) \right ]")
platí, že sú rôzne. Teda zobrazenie je bijektívne.
Dôkaz, pre podmienku (AP2') nájdete v práci Afinné transformácie na strane 7. Pozrite tiež Príklad 2 na strane 8.
Tvrdenie (operácie s bodmi).
Nech") je afinný priestor s operáciou
je afinný priestor s operáciou ") . Potom pre body
. Potom pre body 
Nech
je afinný priestor s operáciou . Potom pre body

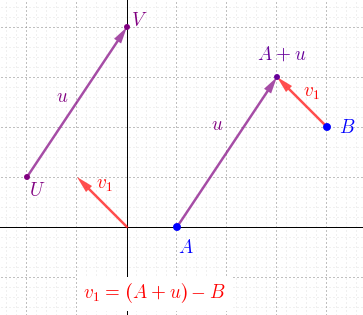
 = B - A \cdot \cdot \cdot -\overrightarrow{BA}=\overrightarrow{AB}")
 - B = (A - B) + \pmb u= A - (B - \pmb u)")
 = (A + \pmb u) + \pmb v")
 + (C - D) = (A - D) + (C - B)")

Dôkaz.
-


- Označme
= A'") .
.
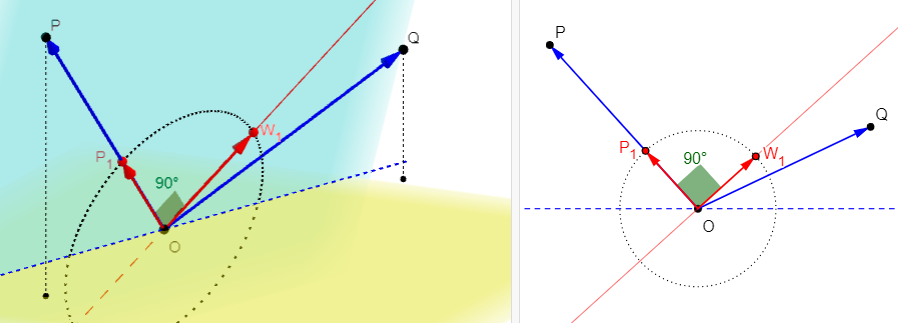
- Z vlastnosti (AP1) (pozri obrázok vľavo a v uprostred) platí
+\pmb u") , čo predstavuje rovnosť
, čo predstavuje rovnosť - B = (A- B)+ \pmb u") .
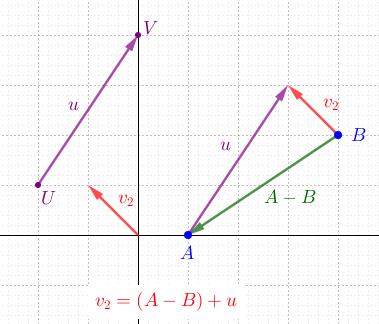
. - Z tvrdenia dostaneme
") (pozri obrázok vpravo). Spojením obrázkov v strede a vpravo vznikne rovnobežník. Z vlastností rovnobežníka a z
vlastnosti (AP1) dostaneme rovnosť
(pozri obrázok vpravo). Spojením obrázkov v strede a vpravo vznikne rovnobežník. Z vlastností rovnobežníka a z
vlastnosti (AP1) dostaneme rovnosť - B = A - (B - \pmb u)") .
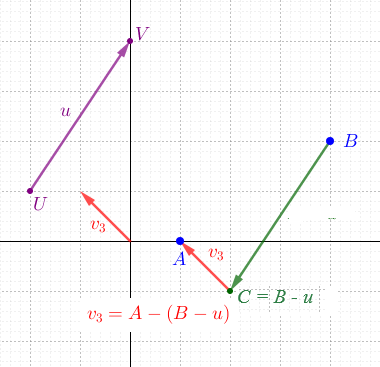
. - Porovnaním rovností a dostaneme rovnosť
+ \pmb u=A - (B - \pmb u)")
- Z vlastnosti (AP1) (pozri obrázok vľavo a v uprostred) platí
- Z vlastnosti (AP1) dostávame
=A + \pmb w=C") . Na druhej strane
. Na druhej strane  + \pmb v=B + \pmb v=C") .
. - Dôkazy ďalších tvrdení nájdete napríklad v práci [Duplák, J.: Afinná a Euklidovská geometria.]
 applet Tu
\)
applet Tu
\)
Lineárna súradnicová sústava
Dimenzia (rozmer) afinného priestoru je dimenzia jeho vektorového zamerania
dim dim
dim ") .
.
dim
dim .
Poznámky
- Dimenziu afinného priestoru označíme indexom vpravo hore, napríklad -rozmerný afinný priestor ako
 .
. - Afinný priestor dimenzie 1 nazývame afinná priamka, označujeme ho
 ale aj ako obvykle
ale aj ako obvykle 
- Afinný priestor dimenzie 2 nazývame afinná rovina, označujeme ho
 ale aj ako obvykle
ale aj ako obvykle 
Uvedieme základné definície z práce (Monoszová, 1), v ktorých sa pomocou bázy vektorového priestoru zavádza repér afinného priestoru a (lineárna) afinná súradnicová sústava. Súhrnne sa pre tento systém používa označenie: afinný súradnicový systém.
Definície.
- Nech
") je afinný priestor a je ľubovoľný bod tohto priestoru. Ďalej nech
je afinný priestor a je ľubovoľný bod tohto priestoru. Ďalej nech  je báza (nie nutne ortonormálna) vektorového priestoru .
Potom
je báza (nie nutne ortonormálna) vektorového priestoru .
Potom ") -tica
-tica  sa nazýva repér afinného priestoru
sa nazýva repér afinného priestoru  .
.
- Nech je afinný priestor, nech
 je repér v .
Lineárna súradnicová sústava (stručne LSS) je bijektívne zobrazenie
je repér v .
Lineárna súradnicová sústava (stručne LSS) je bijektívne zobrazenie
![\small \mathcal {L: A \rightarrow \mathbb R^n}; \; P \rightarrow [p_1,p_2, . . . , p_n],](https://lms.umb.sk/filter/tex/pix.php/f2225c4e51903ae901413c224fbda4ef.png "\small \mathcal {L: A \rightarrow \mathbb R^n}; \; P \rightarrow [p_1,p_2, . . . , p_n],")
pričom . Pozrite si prácu (str. 8-11) Tu.
. Pozrite si prácu (str. 8-11) Tu.
Dôkaz korektnosti definície.
Ľubovoľný vektor (teda aj polohový) vektorového priestoru sa dá jednoznačne vyjadriť ako lineárna kombinácia vektorov bázy tohto vektorového priestoru
 .
.
Z vlastnosti (AP2) vyplýva, že pre bod a vektor  existuje práve jeden bod
existuje práve jeden bod  . Preto aj bod
. Preto aj bod  vzhľadom na danú afinnú sústavu súradníc sa dá jednoznačne vyjadriť ako kombinácia
vzhľadom na danú afinnú sústavu súradníc sa dá jednoznačne vyjadriť ako kombinácia
 .
.
Rovnosť skrátene zapisujeme ako
skrátene zapisujeme ako ![\small P = [p_1,p_2, . . . , p_n]](https://lms.umb.sk/filter/tex/pix.php/cd3bff3cdd6edb7bc37b5e2308304fc3.png "\small P = [p_1,p_2, . . . , p_n]") a
a  -ticu
-ticu
![[\small p_1,p_2, . . . , p_n]](https://lms.umb.sk/filter/tex/pix.php/fc0298f4a320aad14ca87bd805d6a0ec.png "[\small p_1,p_2, . . . , p_n]")
nazývame súradnicami bodu . Súradnice bodu budeme zapisovať v hranatých zátvorkách
. Súradnice bodu budeme zapisovať v hranatých zátvorkách ![\pmb{ [\small x_1,x_2, . . . , x_n] }](https://lms.umb.sk/filter/tex/pix.php/8be3a9e49438bc054ad1d97cb87bcdc4.png "\pmb{ [\small x_1,x_2, . . . , x_n] }") .
Vektor, ktorý určuje lineárna kombinácia
.
Vektor, ktorý určuje lineárna kombinácia  sa nazýva polohový
vektor
sa nazýva polohový
vektor  .
.
Ľubovoľný vektor (teda aj polohový) vektorového priestoru sa dá jednoznačne vyjadriť ako lineárna kombinácia vektorov bázy tohto vektorového priestoru
.
Z vlastnosti (AP2) vyplýva, že pre bod
a vektor existuje práve jeden bod . Preto aj bod vzhľadom na danú afinnú sústavu súradníc sa dá jednoznačne vyjadriť ako kombinácia.
Rovnosť
skrátene zapisujeme ako a -ticu
nazývame súradnicami bodu
. Súradnice bodu budeme zapisovať v hranatých zátvorkách .
Vektor, ktorý určuje lineárna kombinácia sa nazýva polohový
vektor .
Existencia a jednoznačnosť súradníc bodu vyplýva tiež z jednoznačného riešenia rovnice,
 ,
,
keďže vektory tvoria bázu vektorového priestoru .
tvoria bázu vektorového priestoru .
vyplýva tiež z jednoznačného riešenia rovnice,
,keďže vektory
tvoria bázu vektorového priestoru .
Pomenovania .
 – začiatok súradnicovej sústavy
– začiatok súradnicovej sústavy – jednotkové body súradnicovej sústavy
– jednotkové body súradnicovej sústavy – súradnicové osi
– súradnicové osi
Cvičenie.
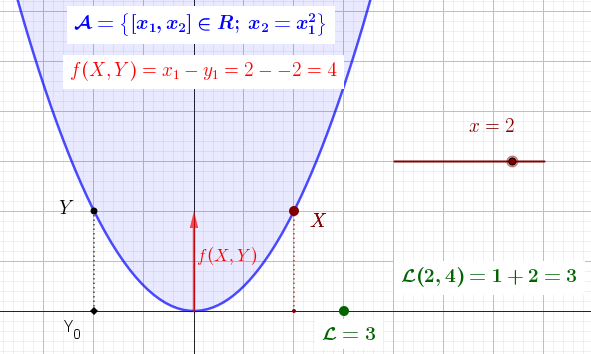
Ukážte, že usporiadaná trojica") je afinný priestor, ak
je afinný priestor, ak ![\small {\mathcal {A}} = \lbrace{ [x_1,x_2] \in R;x_2=x_1^2 }\rbrace , V=R, f( [x_1,x_2], [y_1,y_2])=x_1-y_1](https://lms.umb.sk/filter/tex/pix.php/9b51468f45ac88b2ac91fe89d74d4074.png "\small {\mathcal {A}} = \lbrace{ [x_1,x_2] \in R;x_2=x_1^2 }\rbrace , V=R, f( [x_1,x_2], [y_1,y_2])=x_1-y_1") . Zistite. či zobrazenie
. Zistite. či zobrazenie ![\small \mathcal {L: A \rightarrow \mathbb R^1}; \; \mathcal {L}( [x_1,x_2])=1+x_1](https://lms.umb.sk/filter/tex/pix.php/d08ad3901ed89daea6bc657e89a5dec3.png "\small \mathcal {L: A \rightarrow \mathbb R^1}; \; \mathcal {L}( [x_1,x_2])=1+x_1") je lineárna sústava súradníc.
je lineárna sústava súradníc.
Ukážte, že usporiadaná trojica
je afinný priestor, ak . Zistite. či zobrazenie je lineárna sústava súradníc.
Riešenie.
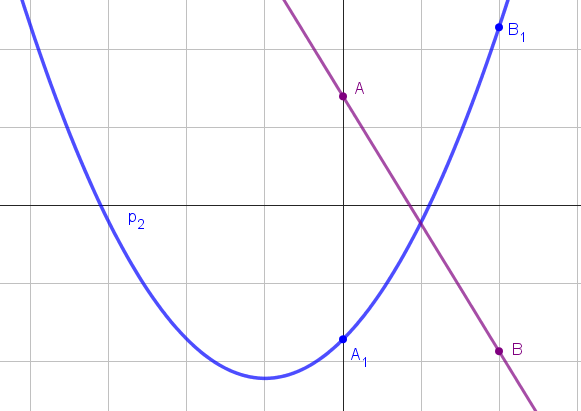
- Ľubovoľný bod
 afinného priestoru má súradnice
afinného priestoru má súradnice ![[x,x^2]](https://lms.umb.sk/filter/tex/pix.php/2a47aadc07cd7da43f678ac9b8e00ec6.png "[x,x^2]") . Množina všetkých bodov afinného priestoru
. Množina všetkých bodov afinného priestoru  je parabola (nakreslite graf v GeoGebre).
je parabola (nakreslite graf v GeoGebre). - Podmienka (AP1) pre body
![\small X[x,x^2],Y[y,y^2],Z[z,z^2]](https://lms.umb.sk/filter/tex/pix.php/a9da4bf39fa9cfcb66460afedc953ec4.png "\small X[x,x^2],Y[y,y^2],Z[z,z^2]") zrejme platí, lebo
zrejme platí, lebo +f(Y,Z)=(x-y)+(y-z)=x-z=f(X,Z)") .
. - Podmienka (AP2): Zvoľme si ľubovoľné reálne čísla
 a body
a body ![\small P[p,p^2],X[x,x^2]](https://lms.umb.sk/filter/tex/pix.php/ca8b4484aad29d6e0f414858bbb2a43d.png "\small P[p,p^2],X[x,x^2]") , potom zobrazenie
, potom zobrazenie =p-x") je bijekcia.
je bijekcia. - Zrejme aj zobrazenie
![\small \mathcal {L: A \rightarrow \mathbb R^1}; \; \mathcal {L}( [x,x^2])=1+x](https://lms.umb.sk/filter/tex/pix.php/0fc66a8834cd1025d9c5b8cd14f37a99.png "\small \mathcal {L: A \rightarrow \mathbb R^1}; \; \mathcal {L}( [x,x^2])=1+x") je bijektívne, preto je LSS.
je bijektívne, preto je LSS.
 \)
\)
Veta o súradniciach
V predchádzajúcej kapitole sme uviedli:
Súradnice bodu afinného priestoru
afinného priestoru  vzhľadom na danú afinnú sústavu súradníc sú súradnice jeho polohového
vektora
vzhľadom na danú afinnú sústavu súradníc sú súradnice jeho polohového
vektora  vzhľadom na bázu súradnicových vektorov. Teda platí
vzhľadom na bázu súradnicových vektorov. Teda platí
 .
.
Súradnice bodu
afinného priestoru vzhľadom na danú afinnú sústavu súradníc sú súradnice jeho polohového
vektora vzhľadom na bázu súradnicových vektorov. Teda platí
.
Po zavedení súradnej sústavy môžeme nielen vektory ale aj body "sčitovať". Pravidlá, ktoré musíme pritom dodržiavať stanovuje tzv. základná
veta o súradniciach, ktorú poznáme z lineárnej algebry.
Základná veta o súradniciach.
Nech sú dané dva body a ich súradnice![\small A=[a_1,a_2, \cdot \cdot \cdot , a_n], B=[b_1,b_2, \cdot \cdot \cdot , b_n] \in \mathcal A](https://lms.umb.sk/filter/tex/pix.php/261b65e9911f1b06ec0962250640e3ce.png "\small A=[a_1,a_2, \cdot \cdot \cdot , a_n], B=[b_1,b_2, \cdot \cdot \cdot , b_n] \in \mathcal A") a
vektor
a
vektor  \in \mathrm V") , potom
, potom
Nech sú dané dva body a ich súradnice
a
vektor , potom
")
![\small A+\vec u=[a_1+u_1,a_2+u_2, \cdot \cdot \cdot , a_n+u_n]](https://lms.umb.sk/filter/tex/pix.php/d996c24c4f0167368e127f25e2dca5fa.png "\small A+\vec u=[a_1+u_1,a_2+u_2, \cdot \cdot \cdot , a_n+u_n]") sú body afinného priestoru
sú body afinného priestoru
.
Dôkaz.
- Zrejme z vlastnosti (AP1) afinného priestoru vyplýva, že
 a pre začiatok súradnej sústavy
a pre začiatok súradnej sústavy  bude platiť
bude platiť =f(A,O)+f(O,B)") tj.
tj.  odkiaľ s využitím "Tvrdenie
(operácie s bodmi), odseky b), e)" dostaneme
odkiaľ s využitím "Tvrdenie
(operácie s bodmi), odseky b), e)" dostaneme
-(A-O)=")
po úprave
+(O-A)=(B-A)+(O-O)=B-A") .
.
Z definície sčítania (rozdielu) vektorov v báze dostaneme
dostaneme
- Z vlastnosti (AP2') afinného priestoru vyplýva, že
 existuje práve jeden bod
existuje práve jeden bod
 taký, že
taký, že  . Pre polohové vektory platí
. Pre polohové vektory platí
 .
.
Z vlastnosti sčítania vektorov dostaneme .
.
Po úprave+(M-P)=(u_1,u_2,\cdot \cdot \cdot ,u_n)+(a_1,a_2, \cdot \cdot \cdot , a_n)=(a_1+u_1, \cdot \cdot \cdot , a_n+u_n)") .
.
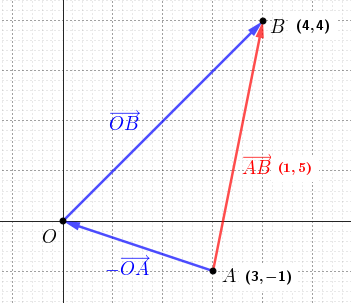
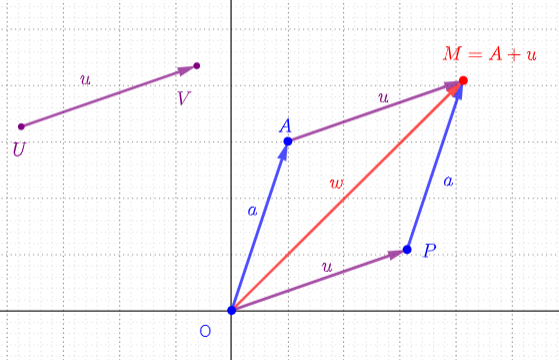
Zmena repéru
Pri závádzaní lineárnej súradnicovej sústavy sa v definícii nekládla požiadavka ortonormálnosti na repér afinného priestoru
afinného priestoru  . To znamená, že súradnice
nejakého bodu
. To znamená, že súradnice
nejakého bodu  môžeme vyjadriť aj vzhľadom na ľubovoľný iný repér. Ako určiť súradnice bodu pri zmene repéru popisuje nasledujúci príklad.
môžeme vyjadriť aj vzhľadom na ľubovoľný iný repér. Ako určiť súradnice bodu pri zmene repéru popisuje nasledujúci príklad.
Pri závádzaní lineárnej súradnicovej sústavy sa v definícii nekládla požiadavka ortonormálnosti na repér
afinného priestoru . To znamená, že súradnice
nejakého bodu môžeme vyjadriť aj vzhľadom na ľubovoľný iný repér. Ako určiť súradnice bodu pri zmene repéru popisuje nasledujúci príklad.
Príklad.
- Nech
![\small S= \left\langle {Q[1,-2,1],\vec a (1, 1, 2),\;\vec b(-3, 2, 1),\;\vec c (-2, 1, 0) }\right\rangle](https://lms.umb.sk/filter/tex/pix.php/2a7471cea093344d706c58d3a02f2507.png "\small S= \left\langle {Q[1,-2,1],\vec a (1, 1, 2),\;\vec b(-3, 2, 1),\;\vec c (-2, 1, 0) }\right\rangle") je súradnicová sústava afinného
priestoru
je súradnicová sústava afinného
priestoru , f )") , kde zobrazenie
, kde zobrazenie  je definované ako rozdiel súradníc bodov po zložkách. Nájdite bod
je definované ako rozdiel súradníc bodov po zložkách. Nájdite bod  , ktorého súradnice vzhľadom k repéru sú
, ktorého súradnice vzhľadom k repéru sú ![\small [-2, 1, 2]](https://lms.umb.sk/filter/tex/pix.php/dc9121ac8fc58ff90745e1f3d6118867.png "\small [-2, 1, 2]") .
. - Nájdite súradnice bodu
![\small P = [4,-3,1]](https://lms.umb.sk/filter/tex/pix.php/fad406c20a268ba80726f0debea151a3.png "\small P = [4,-3,1]") vzhľadom k báze .
vzhľadom k báze .
Riešenie.
- Zrejme
![\small R = [1,-2,1]+(-2).(1, 1, 2) + 1(-3, 2, 1) + 2.(-2, 1, 0) = (-8, 0, -2)](https://lms.umb.sk/filter/tex/pix.php/f016c1c3a707de12152526046bbb004c.png "\small R = [1,-2,1]+(-2).(1, 1, 2) + 1(-3, 2, 1) + 2.(-2, 1, 0) = (-8, 0, -2)") .
.
Toto sú súradnice bodu vzhľadom k ortonormálnemu repéru - kanonické súradnice. Je dôležité dodržať poradie prvkov repéru . Urobte geometrickú interpretáciu.
vzhľadom k ortonormálnemu repéru - kanonické súradnice. Je dôležité dodržať poradie prvkov repéru . Urobte geometrickú interpretáciu. - Určiť súradnice vzhľadom k repéru znamená bod vyjadriť ako lineárnu kombináciu prvkov repéru .
Opäť treba dať pozor na poradie prvkov bázy. Musíme nájsť
 , pre ktoré platí:
, pre ktoré platí:
 + q_2.(-3, 2, 1) + q_3.(-2, 1, 0)") resp.
resp.
 = q_1.(1, 1, 2) + q_2.(-3, 2, 1) + q_3.(-2, 1, 0)") .
.
Úlohu môžeme riešiť ako sústavu rovníc (vyriešte úlohu týmto spôsobom).

Poslednú rovnosť môžeme vyjadriť v maticovom tvare (vektory repéru zapisujeme do stĺpcov!):
 \cdot \left(\begin{array}{ccc} \;3 \\ -1 \\ \;0 \end{array}\right) =
\left(\begin{array}{ccc} 1&-3&-2 \\ 1&\;2&\;1 \\ 2&\;1&\;0\end{array}\right) \cdot \left(\begin{array}{ccc} q_1 \\ q_2 \\q_3 \end{array}\right)") Riešením je bod
Riešením je bod ") .
.
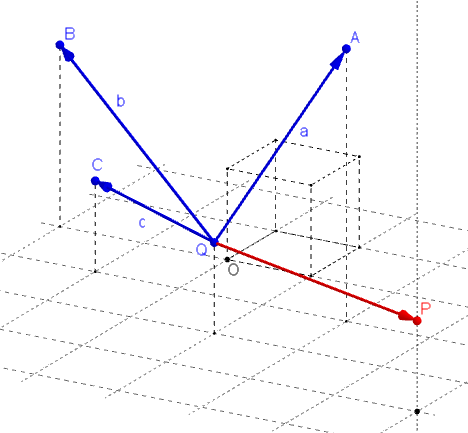
Cvičenie.
Zistite, aké súradnice má bod ∈ A^3") v afinnej súradnicovej sústave
v afinnej súradnicovej sústave ![\small [O;\pmb {e_1} ,\pmb {e_2} ,\pmb {e_3} ]](https://lms.umb.sk/filter/tex/pix.php/44d228191e592295cf515854200bd36d.png "\small [O;\pmb {e_1} ,\pmb {e_2} ,\pmb {e_3} ]") , ak
, ak
") ;
;
 ;
;
 .
.
Zistite, aké súradnice má bod
v afinnej súradnicovej sústave , ak
;
;
.
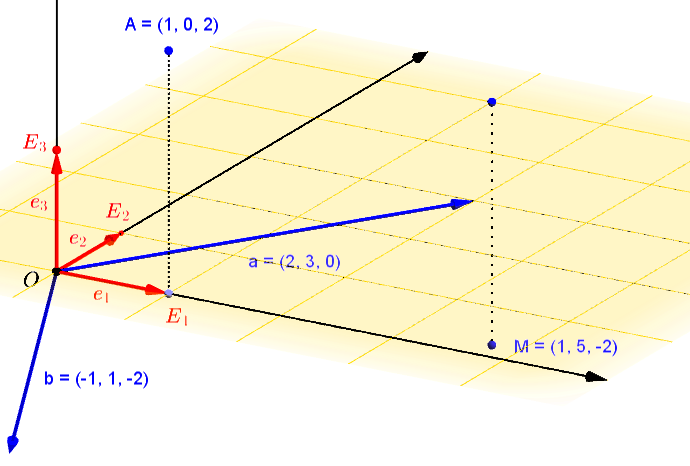
Riešenie.
- Algebraické riešenie: Dosaďte do výrazu
") hodnoty za
hodnoty za  a dostanete súradnice
a dostanete súradnice ![[1,5,-2]](https://lms.umb.sk/filter/tex/pix.php/ecdc55665c1fccb7a9d931f03454e170.png "[1,5,-2]") .
. - Grafické riešenie: Aktivujte si repér
 v GeoGebre
Tu.
Do vstupného poľa postupne zadajte , , a . Porovnajte výsledok.
v GeoGebre
Tu.
Do vstupného poľa postupne zadajte , , a . Porovnajte výsledok.
\)
Afinný podpriestor
Zvoľme si v afinnom priestore ") jeden pevný bod a nejaké zameranie
jeden pevný bod a nejaké zameranie  , ktoré je podmnožinou vektorového zamerania
, ktoré je podmnožinou vektorového zamerania  . Dostaneme podmnožinu bodov afinného priestoru, ktorá bude spĺňať axiómy afinného priestoru. Takouto množinou je napríklad priamka v euklidovskej rovine alebo rovina v euklidovskom priestore.
. Dostaneme podmnožinu bodov afinného priestoru, ktorá bude spĺňať axiómy afinného priestoru. Takouto množinou je napríklad priamka v euklidovskej rovine alebo rovina v euklidovskom priestore.
jeden pevný bod a nejaké zameranie , ktoré je podmnožinou vektorového zamerania . Dostaneme podmnožinu bodov afinného priestoru, ktorá bude spĺňať axiómy afinného priestoru. Takouto množinou je napríklad priamka v euklidovskej rovine alebo rovina v euklidovskom priestore.
Definícia.
Nech je afinný priestor nad poľom . Neprázdnu podmnožinu  nazývame afinný podpriestor resp. lineárna varieta afinného priestoru ,
ak existuje vektorový podpriestor
nazývame afinný podpriestor resp. lineárna varieta afinného priestoru ,
ak existuje vektorový podpriestor  , pričom platí
, pričom platí
Nech
je afinný priestor nad poľom . Neprázdnu podmnožinu nazývame afinný podpriestor resp. lineárna varieta afinného priestoru ,
ak existuje vektorový podpriestor , pričom platí
 \in \mathrm V'")
 \in \mathcal A'")
Dokážte, že , x \in \mathbb R\right\}") je afinný podpriestor priestoru
je afinný podpriestor priestoru ") ,
,
, x \in \mathbb R^4;x_4=1\right\}")
, x \in \mathbb R^4;x_4=0\right\}")
 je odčítanie po zložkách. [MON 1.4.1]
je odčítanie po zložkách. [MON 1.4.1]
je afinný podpriestor priestoru ,
je odčítanie po zložkách. [MON 1.4.1]
Tvrdenie.
Nech![\small X= [x_1, x_2, \cdot \cdot \cdot x_n]](https://lms.umb.sk/filter/tex/pix.php/849e663d14ddce160818d00568aeb6ba.png "\small X= [x_1, x_2, \cdot \cdot \cdot x_n]") je ľubovoľný bod z afinného priestoru
je ľubovoľný bod z afinného priestoru  . Potom bod leží v podpriestore
. Potom bod leží v podpriestore  , práve vtedy, keď platí rovnosť
, práve vtedy, keď platí rovnosť
 ,
,
kde![\small A= [a_1, a_2, \cdot \cdot \cdot a_n] \in \mathcal A^k](https://lms.umb.sk/filter/tex/pix.php/6842e3db0adab2c2a859a2aef4c471cd.png "\small A= [a_1, a_2, \cdot \cdot \cdot a_n] \in \mathcal A^k") ;
;  sú reálne čísla a
sú reálne čísla a  je
je  lineárne nezávislých vektorov
podpriestoru
lineárne nezávislých vektorov
podpriestoru ") . Uvedená rovnosť sa nazýva parametrické vyjadrenie podpriestoru . Čísla
. Uvedená rovnosť sa nazýva parametrické vyjadrenie podpriestoru . Čísla  sa nazývajú parametre bodu .
sa nazývajú parametre bodu .
Nech
je ľubovoľný bod z afinného priestoru . Potom bod leží v podpriestore , práve vtedy, keď platí rovnosť
,
kde
; sú reálne čísla a je lineárne nezávislých vektorov
podpriestoru . Uvedená rovnosť sa nazýva parametrické vyjadrenie podpriestoru . Čísla sa nazývajú parametre bodu .
Poznámky.
Pre rovnosť sa tradične používa nie úplne presný názov parametrické rovnice podpriestoru. Parametrické rovnice podpriestoru majú známy tvar
sa tradične používa nie úplne presný názov parametrické rovnice podpriestoru. Parametrické rovnice podpriestoru majú známy tvar


...
 ,
,
kde sú súradnice bodu a ") sú súradnice vektora
sú súradnice vektora  v
kanonickej báze
v
kanonickej báze  . Túto sústavu rovníc môžeme zapísať pomocou matíc. Maticový tvar parametrických rovníc vyzerá takto
. Túto sústavu rovníc môžeme zapísať pomocou matíc. Maticový tvar parametrických rovníc vyzerá takto
 =\left( \begin{array}{} a_{1} \\
a_{2} \\
\;· \\
a_{n}
\end{array} \right)
+\left( \begin{array}{} a_{12} & a_{12} & ··· & a_{1k} \\
a_{22} & a_{22} & ··· & a_{2k} \\
\; ··· & \\
a_{n2} & a_{n2} & ··· & a_{nk}
\end{array} \right) ·
\left( \begin{array}{} t_1 \\
t_2 \\
\;· \\
t_k \\ \end{array} \right)\\ \; \\")
Maticu sústavy z predchádzajúceho vyjadrenia nazývame matica prechodu od afinnej súradnicovej sústavy
z predchádzajúceho vyjadrenia nazývame matica prechodu od afinnej súradnicovej sústavy
 do sústavy
do sústavy
 .
.
Pre rovnosť
sa tradične používa nie úplne presný názov parametrické rovnice podpriestoru. Parametrické rovnice podpriestoru majú známy tvar
...
,
kde
sú súradnice bodu a sú súradnice vektora v
kanonickej báze . Túto sústavu rovníc môžeme zapísať pomocou matíc. Maticový tvar parametrických rovníc vyzerá takto
Maticu sústavy
z predchádzajúceho vyjadrenia nazývame matica prechodu od afinnej súradnicovej sústavy
do sústavy
.
Príklad 1.
Zistite, či body![\small M = [9, -2, 5], N = [4, 1, 6]](https://lms.umb.sk/filter/tex/pix.php/8a3cde48cba700d2cdcf1f273d3c9937.png "\small M = [9, -2, 5], N = [4, 1, 6]") incidujú s podpriestorom (ležia v podpriestore)
incidujú s podpriestorom (ležia v podpriestore)  . Dané sú
bod
. Dané sú
bod ![\small A = [1, 3, 2]](https://lms.umb.sk/filter/tex/pix.php/f7db82372dc4ba7d322d4d064720b97d.png "\small A = [1, 3, 2]") a vektory
a vektory , v = (1, -1, 0)") . Nájdite parametrické vyjadrenie tohto podpriestoru. Vytvorte grafickú ilustrácia k tomuto príkladu.
. Nájdite parametrické vyjadrenie tohto podpriestoru. Vytvorte grafickú ilustrácia k tomuto príkladu.
Zistite, či body
incidujú s podpriestorom (ležia v podpriestore) . Dané sú
bod a vektory . Nájdite parametrické vyjadrenie tohto podpriestoru. Vytvorte grafickú ilustrácia k tomuto príkladu.
Riešenie.
Hľadáme reálne čísla , pre ktoré platí rovnosť (vektorová rovnica má práve jedno riešenie)
, pre ktoré platí rovnosť (vektorová rovnica má práve jedno riešenie)
![\small [9, -2, 5]= [1, 3, 2]+ r(2, -1, 1)+ s (1, -1, 0)](https://lms.umb.sk/filter/tex/pix.php/987fedb1246681eac4577b8596ffe7df.png "\small [9, -2, 5]= [1, 3, 2]+ r(2, -1, 1)+ s (1, -1, 0)") resp.
resp. ![\small [4, 1, 6]= [1, 3, 2]+ r(2, -1, 1)+ s (1, -1, 0)](https://lms.umb.sk/filter/tex/pix.php/93de6ddda2e4e5ebafc0d01957f5e5fc.png "\small [4, 1, 6]= [1, 3, 2]+ r(2, -1, 1)+ s (1, -1, 0)")
Odpoveď: Bod![\small M = [9, -2, 5]](https://lms.umb.sk/filter/tex/pix.php/4d2415124dd26dc5ad3d4122c173aa75.png "\small M = [9, -2, 5]") inciduje s daným podpriestorom, riešenie nájdete
Tu. Ukážte, že bod
inciduje s daným podpriestorom, riešenie nájdete
Tu. Ukážte, že bod ![\small N = [4, 1, 6]](https://lms.umb.sk/filter/tex/pix.php/f2bd7784e5e4385754858ca3d595e26d.png "\small N = [4, 1, 6]") neleží v danom podpriestore.
neleží v danom podpriestore.
Hľadáme reálne čísla
, pre ktoré platí rovnosť (vektorová rovnica má práve jedno riešenie) resp.
Odpoveď: Bod
inciduje s daným podpriestorom, riešenie nájdete
Tu. Ukážte, že bod neleží v danom podpriestore. Neparametrické vyjadrenie podpriestoru
V afinnom priestore môžeme lineárne podpriestory  vyjadriť aj neparametricky pomocou sústavy
vyjadriť aj neparametricky pomocou sústavy  lineárnych rovníc s neznámymi.
Ich počet je závislý od dimenzie podpriestoru a od dimenzie daného priestoru .
Musí byť splnená rovnosť:
lineárnych rovníc s neznámymi.
Ich počet je závislý od dimenzie podpriestoru a od dimenzie daného priestoru .
Musí byť splnená rovnosť:  . V stredoškolskej analytickej geometrii
. V stredoškolskej analytickej geometrii
môžeme lineárne podpriestory vyjadriť aj neparametricky pomocou sústavy lineárnych rovníc s neznámymi.
Ich počet je závislý od dimenzie podpriestoru a od dimenzie daného priestoru .
Musí byť splnená rovnosť: . V stredoškolskej analytickej geometrii
- Priamka (
 ) ležiaca v rovine (
) ležiaca v rovine ( ) je vyjadrená jedinou lineárnou rovnicou s dvoma neznámymi.
Bod (
) je vyjadrená jedinou lineárnou rovnicou s dvoma neznámymi.
Bod ( ) je chápaný ako prienik dvoch priamok, teda môže byť vyjadrený ako sústava dvoch lineárnych rovníc.
) je chápaný ako prienik dvoch priamok, teda môže byť vyjadrený ako sústava dvoch lineárnych rovníc. - V afinnom priestore
 rovina (nadrovina (
rovina (nadrovina ( )) je vyjadrená jedinou lineárnou rovnicou s troma neznámymi
)) je vyjadrená jedinou lineárnou rovnicou s troma neznámymi  .
Priamka je prienikom dvoch rovín
a na jej určenie sú potrebné dve rovnice
.
Priamka je prienikom dvoch rovín
a na jej určenie sú potrebné dve rovnice  .
.
Príklad 2.
- Nájdite neparametrické vyjadrenie roviny z príkladu 1 a zistite, či body incidujú s touto rovinou.
- Nájdite parametrické aj neparametrické vyjadrenie roviny v , ktorá prechádza bodom
![\small A = [1, 2,3]](https://lms.umb.sk/filter/tex/pix.php/d9be5bff457cbec833831928a2dfd25a.png "\small A = [1, 2,3]") a má smer
a má smer ,\vec{v}=(2,-1,0)") .
.
Riešenie Tu
Vytvorte grafickú ilustrácia k tomuto príkladu.
Pre lineárny podpriestor platí, že s každými dvoma bodmi  obsahuje tento podpriestor aj bod
obsahuje tento podpriestor aj bod
;\;t \in \mathbb R") .
.
Dôkaz tohto tvrdenia sa robí v základnom kurze z lineárnej algebry.
obsahuje tento podpriestor aj bod
.
Dôkaz tohto tvrdenia sa robí v základnom kurze z lineárnej algebry.
Lineárne podpriestory s danou dimenziou.
- Afinný podpriestor dimenzie 1 sa nazýva afinnou priamka.
- Afinný podpriestor dimenzie 2 sa nazýva afinnou rovina.
- Afinný podpriestor dimenzie -1 v -rozmernom afinnom priestore sa nazýva nadrovina .
Zrejme priamka je zároveň nadrovinou v
priestore
 a rovina je nadrovinou v .
a rovina je nadrovinou v . - Budeme hovoriť, že podpriestor
") je -rozmerný (má dimenziu
je -rozmerný (má dimenziu  ),
ak podpriestor
),
ak podpriestor  má dimenziu (dim
má dimenziu (dim  ).
).
Príklady.
- Napíšte parametrické vyjadrenie podpriestoru v
 , ktorý je daný všeobecnými rovnicami:
, ktorý je daný všeobecnými rovnicami:

- Dokážte, že množina
 \in \mathbb R^3; x + y - 2z = 5, x - y = 1}\rbrace")
je priamkou v afinnom priestore
 \in R^3; x_1 + x_2 - 2x_3 = 5}\rbrace , V^3(\mathbb R) = \lbrace{(x_1, x_2, x_3) \in \mathbb R^3; x_1 + x_ 2 - 2x_3 = 0}\rbrace") .
.
 \in \mathbb R^3; x + y - 2z = 5}\rbrace")
 \in \mathbb R^3; x - y = 1}\rbrace") \)
\)
Vzájomná poloha útvarov
Lineárne podpriestory, ktorých prienik je prázdna množina, nazývame disjunktné. Hovoríme aj, že takého podpriestory sa nepretínajú.
Ak nie sú dva podpriestory disjunktné, potom sú nedisjunktné (pretínajú sa, majú neprázdny prienik).
Tvrdenie.
Nech, \mathbb A^s=(\mathcal A_2,V_2,+)") sú lineárne podpriestory priestoru
sú lineárne podpriestory priestoru  a
a  sú ich smerové podpriestory. Potom platia nasledovné tvrdenia:
sú ich smerové podpriestory. Potom platia nasledovné tvrdenia:
Nech
sú lineárne podpriestory priestoru a
sú ich smerové podpriestory. Potom platia nasledovné tvrdenia:
- Neprázdny prienik podpriestorov
 a
a  je podpriestor, ktorého smer je prienikom
je podpriestor, ktorého smer je prienikom  .
. - Ak je prienik podpriestorov neprázdny
 a platí, že
a platí, že  ,
tak podpriestor
,
tak podpriestor  .
.
Lineárne podpriestory sa nazývajú:
- Rovnobežné, ak všetky smerové vektory jedného podpriestoru sú smerovými vektormi druhého.
- Rôznobežné, ak majú spoločný aspoň jeden bod a žiadny z podpriestorov nie je podmnožinou druhého.
- Mimobežné, ak sú disjunktné a prienik smerových podpriestorov obsahuje len nulový vektor.
Príklad.
Zistite, aká je vzájomná poloha priamok
Zistite, aká je vzájomná poloha priamok



Riešenie.
- Smerové vektory priamok
 sú lineárne závislé, preto
sú lineárne závislé, preto  uvažované priamky sú navzájom rovnobežné.
uvažované priamky sú navzájom rovnobežné. - Ak priamky
 majú spoločný bod
majú spoločný bod ![\small P=[x_p,y_p,z_p]](https://lms.umb.sk/filter/tex/pix.php/83a68aa679fa29469463fc9b21409025.png "\small P=[x_p,y_p,z_p]") , tak existuje parameter
, tak existuje parameter  , ktorý je riešením sústavy
, ktorý je riešením sústavy

a zároveň súradnice![\small [3+t,1+t,2-t]](https://lms.umb.sk/filter/tex/pix.php/56153ef98a98308b3fa1f3eca85cc0dd.png "\small [3+t,1+t,2-t]") tohto spoločného bodu priamky
tohto spoločného bodu priamky  s priamkou
s priamkou  musia byť riešením sústavy rovníc
musia byť riešením sústavy rovníc
+(1+t)+(2-t)-5=0\\ \small (3+t)-(1+t)+2(2-t)-8=0")
čiže
ktorá má jediné riešenie . Prienikom priamok je teda bod
. Prienikom priamok je teda bod ![\small [2 ,0 ,3 ]](https://lms.umb.sk/filter/tex/pix.php/c7b0b29edf087c5e7bf65905c8dfe3b5.png "\small [2 ,0 ,3 ]") a preto sú priamky rôznobežné.
a preto sú priamky rôznobežné. - Odpovedajúca sústava nemá riešenie a spoločné vektory sú LN, priamky sú mimobežné
Domáca úloha.
Práca (Tisoň, Lineárne podpriestory, dostupné Tu) strana 31.
Práca (Tisoň, Lineárne podpriestory, dostupné Tu) strana 31.
\)
Euklidovský priestor
Vektorový priestor, na ktorom je definovaný skalárny súčin (tiež nazývaný aj vnútorný súčin) umožňuje rozumne definovať geometrické pojmy uhol a vzdialenosť, čím na tomto vektorovom priestore vzniká dodatočná geometrická štruktúra.
Euklidovský priestor je -rozmerný afinný priestor so zameraním a s vyššie
definovaným skalárnym súčinom; označovať’ ho budeme symbolom  .
.
-rozmerný afinný priestor so zameraním a s vyššie
definovaným skalárnym súčinom; označovať’ ho budeme symbolom .
Vo vektorovom priestore okrem skalárneho súčinu, ktorého výsledkom je skalár (reálne číslo), môžeme definovať operáciu, ktorej výsledkom bude
vektor kolmý na obidva pôvodné vektory. Pre vektorový súčin uvedieme definíciu pomocou zobrazenie, ktoré dvojici vektorov v trojrozmernom Euklidovskom
priestore priraďuje vektor kolmý na obidva pôvodné vektory.
Definícia - vektorový súčin.
Vektorový súčin dvoch vektorov") je definovaný ako vektor kolmý k vektorom
je definovaný ako vektor kolmý k vektorom  , ktorého veľkosť
je rovná ploche kosodĺžnika, ktorý oba vektory vytvárajú. Zapisujeme
, ktorého veľkosť
je rovná ploche kosodĺžnika, ktorý oba vektory vytvárajú. Zapisujeme
 ,
,
kde je uhol zvieraný vektormi s vlastnosťou
je uhol zvieraný vektormi s vlastnosťou  a
a  je jednotkový
vektor kolmý k nim.
je jednotkový
vektor kolmý k nim.
Vektorový súčin dvoch vektorov
je definovaný ako vektor kolmý k vektorom , ktorého veľkosť
je rovná ploche kosodĺžnika, ktorý oba vektory vytvárajú. Zapisujeme
,
kde
je uhol zvieraný vektormi s vlastnosťou a je jednotkový
vektor kolmý k nim.
- Vektorový súčin vektorov budeme označovať symbolom
 .
. - Vektorový súčin vektorov je definovaný pre 3-rozmerný Euklidovský priestor!
Veta.
Vektorový súčin možno definovať aj bez pomoci uhla, ktorý oba vektory určujú. Nech sú dané vektory; \pmb {b}= ( b_1,b_2,b_3)") . Potom
zložky vektora
. Potom
zložky vektora  vektorového súčinu
vektorového súčinu  možno určiť ako
možno určiť ako
 .
.
Vektorový súčin možno definovať aj bez pomoci uhla, ktorý oba vektory určujú. Nech sú dané vektory
. Potom
zložky vektora vektorového súčinu možno určiť ako
.
Pomôcka na výpočet súradníc vektora .
Zapíšeme si súradnice vektorov do zákrytov pod seba, prvý riadok budú súradnice vektora a pridáme ešte raz jeho
prvú a druhú súradnicu. V druhom riadku urobím to isté s vektorom
a pridáme ešte raz jeho
prvú a druhú súradnicu. V druhom riadku urobím to isté s vektorom  . Dostaneme schému
. Dostaneme schému
 .
.
Teraz určíme súradnice vektora - krížové násobenie: ") .
.
.
Zapíšeme si súradnice vektorov do zákrytov pod seba, prvý riadok budú súradnice vektora
a pridáme ešte raz jeho
prvú a druhú súradnicu. V druhom riadku urobím to isté s vektorom . Dostaneme schému
.
Teraz určíme súradnice vektora
- krížové násobenie: .
Poznámky.
- Pre obsah trojuholníka
 je známy vzorec
je známy vzorec  , kde
, kde  . Porovnaním s definíciou
vektorového súčinu, môžeme písať
. Porovnaním s definíciou
vektorového súčinu, môžeme písať  .
.
- Pomocou zmiešaného súčinu troch vektorov môžeme vypočítať objem rovnobežnostena. Pozrite si prácu Vodičková, V.: Aplikácie vektorového súčinu. Dostupné Tu.
Cvičenie.
- Zistite, či zobrazenie (operácia)

 je
skalárnym súčinom, ak
je
skalárnym súčinom, ak
, (x_2,y_2)) =x_1y_1-3x_1y_2-3x_2y_1+10y_1y_2") ,
,, (x_2,y_2)) =x_1y_1-3x_1y_2-3x_2y_1+10x_2y_2") .
.
- Zistite aký uhol zvierajú jednotkové vektory
 , ak
, ak  sú na seba kolmé vektory.
sú na seba kolmé vektory. - Vypočítajte obsah rovnobežníka
 , ak poznáte súradnice troch jeho vrcholov:
, ak poznáte súradnice troch jeho vrcholov: ![\small A[5; 1; 4], B[−1; −2; 6], C[2; 3; −2]](https://lms.umb.sk/filter/tex/pix.php/19ed960c9979573457cd0ef9b18a7051.png "\small A[5; 1; 4], B[−1; −2; 6], C[2; 3; −2]") . Vytvorte si model v GeoGebre.
. Vytvorte si model v GeoGebre. - Vypočítajte veľkosť vektora
 , ak
, ak ||= \frac{2}{3} \pi") .
.
Riešenie.
- ...
- ...
Lineárnu súradnicovú sústavu v  danú repérom
danú repérom  nazývame
karteziánskou súradnicovou sústavou, ak
nazývame
karteziánskou súradnicovou sústavou, ak  je ortonormálna báza
zamerania .
je ortonormálna báza
zamerania .
Označenie pre súradnice bodu![\small X[x_1, x_2, . . . , x_n]](https://lms.umb.sk/filter/tex/pix.php/eba92bf93a3de0a9032b7ed7172dbbd8.png "\small X[x_1, x_2, . . . , x_n]") a vektora
a vektora ") v karteziánskej súradnicovej sústave.
v karteziánskej súradnicovej sústave.
danú repérom nazývame
karteziánskou súradnicovou sústavou, ak je ortonormálna báza
zamerania .
Označenie pre súradnice bodu
a vektora v karteziánskej súradnicovej sústave.
\)
Lineárna kombinácia bodov
Nech  je -rozmerný euklidovský priestor so zameraním a nech
je -rozmerný euklidovský priestor so zameraním a nech  sú body tohto
euklidovského priestoru.
sú body tohto
euklidovského priestoru.
je -rozmerný euklidovský priestor so zameraním a nech sú body tohto
euklidovského priestoru.
Definícia.
Afinná (barycentrická resp. lineárna) kombinácia bodov. Nech , tak
súčtom (afinnou kombináciou bodov)
, tak
súčtom (afinnou kombináciou bodov)  rozumieme bod
rozumieme bod
(AK) + · · · + \alpha_m(P_m − P)") ,
,
pričom pre musí platiť
musí platiť  .
.
Afinná (barycentrická resp. lineárna) kombinácia bodov. Nech
, tak
súčtom (afinnou kombináciou bodov) rozumieme bod
(AK)
,
pričom pre
musí platiť .
Dôkaz korektnosti definície.
Treba ukázať, že afinná kombinácia (AK) nezávisí od voľby bodu.
Nech a nech
a nech  je ľubovoľný bod. Upravujme afinnú kombináciu
je ľubovoľný bod. Upravujme afinnú kombináciu
 + \cdot \cdot \cdot +\alpha_m(P_m-Q) =")
aplikovaním tvrdenia") dostaneme
dostaneme
 + \alpha_1(P_1-(P+(Q-P)) + \cdot \cdot \cdot +\alpha_m(P_m-(P+(Q-P)) =")
 - \alpha_1(Q-P) + \cdot \cdot \cdot - \alpha_m(Q-P)+ \alpha_1(P_1-P) + \cdot \cdot \cdot + \alpha_m(P_m-P) =")
![\small=P + (Q-P)- [(\alpha_1 + \cdot \cdot \cdot + \alpha_m)(Q - P)] + [\alpha_1(P_1 - P) + \cdot \cdot \cdot + \alpha_m(P_m - P)] =](https://lms.umb.sk/filter/tex/pix.php/990274bd238b1e5772ccef057aa486e9.png "\small=P + (Q-P)- [(\alpha_1 + \cdot \cdot \cdot + \alpha_m)(Q - P)] + [\alpha_1(P_1 - P) + \cdot \cdot \cdot + \alpha_m(P_m - P)] =")
![\small = P + [(Q-P)- 1 . (Q − P)]+ [\alpha_1(P_1 - P) + \cdot \cdot \cdot + \alpha_m(P_m - P)] =](https://lms.umb.sk/filter/tex/pix.php/8af6504c326498a435d4fe3426f65986.png "\small = P + [(Q-P)- 1 . (Q − P)]+ [\alpha_1(P_1 - P) + \cdot \cdot \cdot + \alpha_m(P_m - P)] =")
 + \cdot \cdot \cdot + \alpha_m(P_m − P)") .
.
Čo bolo treba dokázať.
Treba ukázať, že afinná kombinácia (AK) nezávisí od voľby bodu
.
Nech
a nech je ľubovoľný bod. Upravujme afinnú kombináciu
aplikovaním tvrdenia
dostaneme
.
Čo bolo treba dokázať.
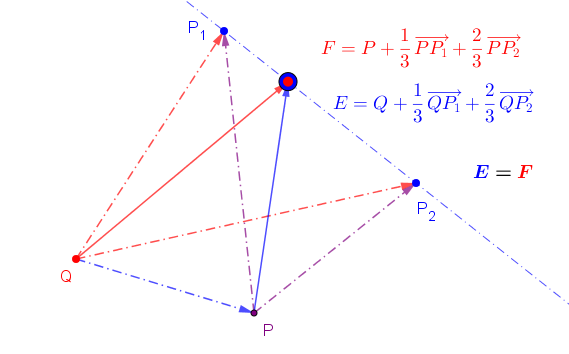
Usporiadaná množina bodov  afinného priestoru
afinného priestoru  sa nazýva simplex
priestoru , kde
sa nazýva simplex
priestoru , kde
 .
.
afinného priestoru sa nazýva simplex
priestoru , kde
 je repér priestoru ,
je repér priestoru ,  sú ortonormálové vektory.
Ľubovoľný bod
sú ortonormálové vektory.
Ľubovoľný bod
 má v tomto repéri súradnice
má v tomto repéri súradnice ![\small [x_1, . . . , x_n]](https://lms.umb.sk/filter/tex/pix.php/4a8ded17926937e08716405dcff18ab2.png "\small [x_1, . . . , x_n]") .
.
.
.
Veta bod ako kombinácia simplexu.
Ľubovoľný bod sa dá jednoznačne vyjadriť v tvare
sa dá jednoznačne vyjadriť v tvare
 ,
,
kde .
.
Ľubovoľný bod
sa dá jednoznačne vyjadriť v tvare
,
kde
.
Dôkaz.
Z vlastnosti (AP1) afinného priestoru vyplýva, že pre ľubovoľný (každý) bod platí
platí
(Q) .
.
Vektor vzhľadom na repér sa dá jednoznačne vyjadriť
ako lineárna kombinácia
vzhľadom na repér sa dá jednoznačne vyjadriť
ako lineárna kombinácia  .
.
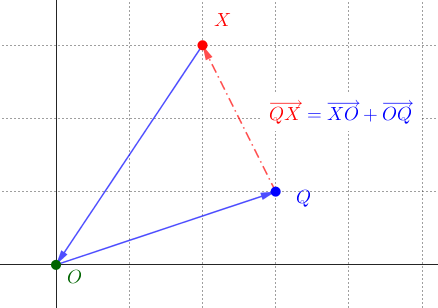 Využitím vzťahov
Využitím vzťahov  upravme vzťah (Q)
upravme vzťah (Q)
+...+ x_n(\overrightarrow{OQ}+\overrightarrow{QE_n})") ,
,
odkiaľ
\overrightarrow{OQ}+x_1\overrightarrow{QE_1}+ . . . + x_n\overrightarrow{QE_n}") ,
,
Keďže predchádzajúci vzťah nie je závislý od bodu , a keď položíme
, a keď položíme ") . Potom dostaneme
. Potom dostaneme
+x_1(E_1-Q)+ . . . + x_n(E_n-Q)")
+(x_1E_1+ . . . + x_nE_n)")
teraz položíme a dostaneme výsledok
a dostaneme výsledok

za predpokladu, že .
.
Z vlastnosti (AP1) afinného priestoru vyplýva, že pre ľubovoľný (každý) bod
platí
(Q)
.
Vektor
vzhľadom na repér sa dá jednoznačne vyjadriť
ako lineárna kombinácia .
upravme vzťah (Q)
,
odkiaľ
,
Keďže predchádzajúci vzťah nie je závislý od bodu
, a keď položíme . Potom dostaneme
teraz položíme
a dostaneme výsledok
za predpokladu, že
.
Pretože rovnosti v dôkaze predošlej vety nezávisia na voľbe bodu  , tak ku každému usporiadanému simplexu a bodu afinného priestoru existuje jediná sústava skalárov
, tak ku každému usporiadanému simplexu a bodu afinného priestoru existuje jediná sústava skalárov  tak,
že platí rovnosť uvedená v tejto vete. Zrejme platí aj obrátená veta: Každá sústava skalárov
tak,
že platí rovnosť uvedená v tejto vete. Zrejme platí aj obrátená veta: Každá sústava skalárov  jednoznačne určuje bod , pre ktorý platí tvrdenie vety.
jednoznačne určuje bod , pre ktorý platí tvrdenie vety.
, tak ku každému usporiadanému simplexu a bodu afinného priestoru existuje jediná sústava skalárov tak,
že platí rovnosť uvedená v tejto vete. Zrejme platí aj obrátená veta: Každá sústava skalárov
jednoznačne určuje bod , pre ktorý platí tvrdenie vety.
Z dôkazu predchádzajúcej vety vyplýva, že súčet  je rovný jednej. Preto podmienka
je rovný jednej. Preto podmienka  v definícii afinnej kombinácii bodov je dôležitá a nutná.
v definícii afinnej kombinácii bodov je dôležitá a nutná.
je rovný jednej. Preto podmienka v definícii afinnej kombinácii bodov je dôležitá a nutná.
Cvičenie.
- Nech
 sú dva rôzne body. Zistite, aký bod predstavuje lineárna kombinácia
sú dva rôzne body. Zistite, aký bod predstavuje lineárna kombinácia  .
. - Nech
 sú tri nekolineárne body. Zistite, ktorý bod predstavuje lineárna kombinácia
sú tri nekolineárne body. Zistite, ktorý bod predstavuje lineárna kombinácia
 . Vyjadrite pomocou lineárnej kombinácie vrcholov trojuholníka
. Vyjadrite pomocou lineárnej kombinácie vrcholov trojuholníka  ľubovoľný vnútorný bod tohto trojuholníka.
ľubovoľný vnútorný bod tohto trojuholníka. - ♥ Vyjadrite pomocou lineárnej kombinácie nezávislých bodov
 ľubovoľný bod podpriestoru
ľubovoľný bod podpriestoru  určeného týmito bodmi.
určeného týmito bodmi.
Riešenie.
- Upravujme
") ,
,
čo predstavuje stred úsečky . Zobrazte túto situáciu v GeoGebre.
. Zobrazte túto situáciu v GeoGebre. - Znázornite túto situáciu v GeoGebre, otvorte si zadanie Tu. Riešenie Tu.
- Podľa vety "bod ako kombinácia simplexu" pre bod podpriestoru a jeho simplex
 platí
platí
(Mx)![\small X=[1-(x_1+· · · + x_k)]O + x_1A_1 + · · · + x_kA_k](https://lms.umb.sk/filter/tex/pix.php/248ac2c5f0e61b17c1a1ab3d3edb6013.png "\small X=[1-(x_1+· · · + x_k)]O + x_1A_1 + · · · + x_kA_k") .
.
Po jednoduchej úprave dostaneme + · · · + x_n(A_n-o)") ,
,
čo predstavuje bod podpriestoru.
- Pre podpriestor
 množina všetkých bodov spĺňajúcich podmienku (Mx) je zrejme priamka (útvar určený dvoma nezávislými bodmi).
Jej parametrické vyjadrenie má tvar
množina všetkých bodov spĺňajúcich podmienku (Mx) je zrejme priamka (útvar určený dvoma nezávislými bodmi).
Jej parametrické vyjadrenie má tvar
") .
.
Po úprave dostaneme \cdot A_0+t \cdot A_1") ,
,
čo predstavuje lineárnu kombináciu bodov .
. - Pre podpriestor
 to bude rovina (útvar určený tromi nezávislými bodmi). Jej parametrické vyjadrenie má
tvar
to bude rovina (útvar určený tromi nezávislými bodmi). Jej parametrické vyjadrenie má
tvar +s(A_2-A_0)") .
.
Po úprave dostaneme \cdot A_0+r \cdot A_1 +s \cdot A_2") ,
,
čo predstavuje lineárnu kombináciu bodov .
.
- Pre podpriestor
\)
Deliaci pomer
Definícia (Deliaci pomer bodov).
Nech a
a  sú tri kolineárne body. Deliacim pomerom bodov
sú tri kolineárne body. Deliacim pomerom bodov  (v tomto poradí) nazývame reálne
číslo
(v tomto poradí) nazývame reálne
číslo  také, že
také, že  = \lambda (C-B)") . Budeme ho označovať
. Budeme ho označovať ") .
.
Nech
a sú tri kolineárne body. Deliacim pomerom bodov (v tomto poradí) nazývame reálne
číslo také, že . Budeme ho označovať .
Vypočítajte
, ak:
, ak:
![\small A = [1, 0, 1], B = [1, 3, -2], C = [1, -3, 4]](https://lms.umb.sk/filter/tex/pix.php/9357e6163937d339ddb9873c6f64ea12.png "\small A = [1, 0, 1], B = [1, 3, -2], C = [1, -3, 4]")
![\small A = [1, 1, 1], B = [2, 0, -1], C = AB \cap \alpha , \alpha : 2x -3y + 2z = 0](https://lms.umb.sk/filter/tex/pix.php/3fe1a88879f544bf32fac05aaf94bcc7.png "\small A = [1, 1, 1], B = [2, 0, -1], C = AB \cap \alpha , \alpha : 2x -3y + 2z = 0")
![\small A = [1, -1], B = A + 2\vec u, C = A- \vec u, \vec u = (1, 2).](https://lms.umb.sk/filter/tex/pix.php/982c567b39f78a847677a6718229ff13.png "\small A = [1, -1], B = A + 2\vec u, C = A- \vec u, \vec u = (1, 2).")
Riešenie.
-
Najskôr je nutné zistiť, či body
 sú kolineárne.
Pre deliaci pomer
sú kolineárne.
Pre deliaci pomer  musí platiť:
musí platiť:
()
= \lambda \cdot (C-B) \Leftrightarrow \overrightarrow{AC} =\lambda \cdot \overrightarrow{BC}") .
.
Potom môžeme spočítať
![\small \vec{u}=\overrightarrow{AC}=\left([1, -3, 4]-[1, 0, 1]\right) =(0,-3,3);\vec{v}=\overrightarrow{BC}\left([1, 3, -2]-[1, -3, 4] \right) =( 0,-6 ,6)](https://lms.umb.sk/filter/tex/pix.php/e5c9cd04bb4e1e22d826351c2a22f340.png "\small \vec{u}=\overrightarrow{AC}=\left([1, -3, 4]-[1, 0, 1]\right) =(0,-3,3);\vec{v}=\overrightarrow{BC}\left([1, 3, -2]-[1, -3, 4] \right) =( 0,-6 ,6)") .
.
Po dosadení do vzťahu () dostaneme  .
. - Najskôr určte súradnice priesečníka
 priamky
priamky  a roviny
a roviny  . Rovnica
priamky je daná parametricky
. Rovnica
priamky je daná parametricky
=
\left(\begin{matrix}
t+1 \\
-t+1 \\
-2t+1
\end{matrix}\right)")
Po dosadení do všeobecnej rovnice roviny určíme riešenie
určíme riešenie  . Spoločný bod
. Spoločný bod  má súradnice
má súradnice ![\small [0,2,3]](https://lms.umb.sk/filter/tex/pix.php/632489b694fb563d57a0e3ea6a4d43c4.png "\small [0,2,3]") .
.
- Najskôr určte súradnice bodov
 .
.
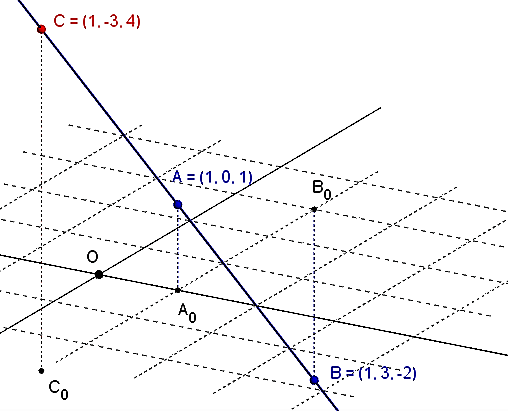
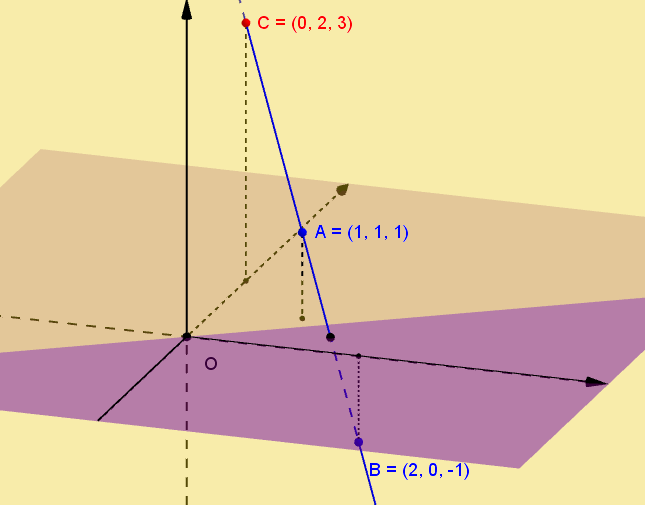
Nasledujúce obrázky dokumentujú vzťah deliaceho pomeru pre pevne zvolené body  a premenlivý bod . Tento vzťah predstavuje hyperbolickú funkciu.
a premenlivý bod . Tento vzťah predstavuje hyperbolickú funkciu.
a premenlivý bod . Tento vzťah predstavuje hyperbolickú funkciu.
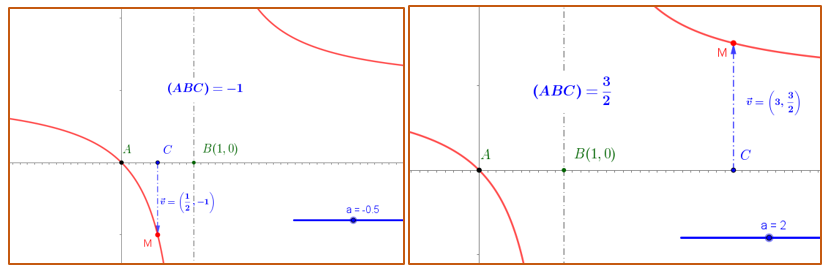
Tvrdenie (Vzťah deliaceho pomeru a lineárnej kombinácie).
NechA + tB,\; t \neq 1") . Potom pre deliaci pomer platí:
. Potom pre deliaci pomer platí:
 = \frac{t}{t-1}") . Pozrite si grafické zdôvodnenie
Tu.
. Pozrite si grafické zdôvodnenie
Tu.
Nech
. Potom pre deliaci pomer platí:
. Pozrite si grafické zdôvodnenie
Tu.
Poznámky.
- Z definície deliaceho pomeru vyplýva, že vektory
, \vec v = (C-B)") sú lineárne závislé a
platí
sú lineárne závislé a
platí  . Preto kvôli korektnosti definície deliaceho pomeru je v definícii uvádzaná podmienka kolineárnosti bodov
. Preto kvôli korektnosti definície deliaceho pomeru je v definícii uvádzaná podmienka kolineárnosti bodov  . Z predchádzajúceho tvrdenia aj z cvičenia 3. tiež vyplýva, že body
sú kolineárne.
. Z predchádzajúceho tvrdenia aj z cvičenia 3. tiež vyplýva, že body
sú kolineárne. - Z cvičenia 1. vyplýva, že existuje bod
 , ktorý budeme nazývať stred dvojice bodov
(resp. úsečky
, ktorý budeme nazývať stred dvojice bodov
(resp. úsečky  ). Ak
). Ak  , tak pre stred
, tak pre stred  platí
platí =-1") .
Stred dvojice bodov budeme označovat’
.
Stred dvojice bodov budeme označovat’  .
.
Tvrdenie.
a) Nech body , potom vektory
, potom vektory  (sa rovnajú) práve vtedy, keď
(sa rovnajú) práve vtedy, keď  (stred rovnobežníka).
(stred rovnobežníka).
b) Pre súradnice stredu platí: ") .
.
Výberové témy a) Nech body
, potom vektory (sa rovnajú) práve vtedy, keď (stred rovnobežníka).
b) Pre súradnice stredu
platí: .
Tvrdenie (Menelaos).
Nech sú nekolineárne body a nech  sú body rôzne od bodov . Potom
body
sú body rôzne od bodov . Potom
body  sú kolineárne práve vtedy, keď
sú kolineárne práve vtedy, keď (BCA′)(CAB′) = 1") .
.
Nech
sú nekolineárne body a nech sú body rôzne od bodov . Potom
body sú kolineárne práve vtedy, keď .
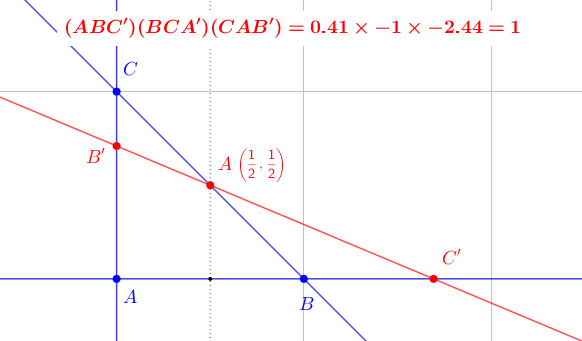
Dôkaz.
Zvoľme afinnú sústavu súradníc tak, že, B = (1,0), C = (0,1)") . Body
. Body  majú po rade súradnice
majú po rade súradnice , (0,b)") ,
pričom
,
pričom  . Rovnica nadroviny (priamky)
. Rovnica nadroviny (priamky)  má všeobecnú rovnicu
má všeobecnú rovnicu  . Preto
. Preto , a ≠ 0, 1") .
Z definície deliaceho pomeru dostaneme
.
Z definície deliaceho pomeru dostaneme
 = c/(c −1), (BCA′) = (a −1)/a, (CAB′) = (b −1)/b") .
.
Po jednoduchých úpravách ľahko zistíme, že rovnosť je ekvivalentná s rovnosťou  .
.
Na druhej strane body sú kolineárne práve vtedy, keď ležia na jednej priamke. Priamka určená bodmi má parametrické vyjadrenie
") .
.
Bod leží na tejto priamke práve vtedy, keď platí
leží na tejto priamke práve vtedy, keď platí ") . Po dosadení súradníc dostaneme sústavu dvoch rovníc o jednej neznámej ,
ktorá má riešenie práve vtedy, keď platí .
. Po dosadení súradníc dostaneme sústavu dvoch rovníc o jednej neznámej ,
ktorá má riešenie práve vtedy, keď platí .
Zvoľme afinnú sústavu súradníc tak, že
. Body majú po rade súradnice ,
pričom . Rovnica nadroviny (priamky) má všeobecnú rovnicu . Preto .
Z definície deliaceho pomeru dostaneme
.
Po jednoduchých úpravách ľahko zistíme, že rovnosť
je ekvivalentná s rovnosťou .
Na druhej strane body
sú kolineárne práve vtedy, keď ležia na jednej priamke. Priamka určená bodmi má parametrické vyjadrenie
.
Bod
leží na tejto priamke práve vtedy, keď platí . Po dosadení súradníc dostaneme sústavu dvoch rovníc o jednej neznámej ,
ktorá má riešenie práve vtedy, keď platí .
Tvrdenie (Ceva, čítaj čéva).
Nech body sú nekolineárne a nech body ležia na stranách odpovedajúcim protiľahlým vrcholom trojuholníka , potom
priamky  sa pretínajú v jednom bode práve vtedy, ak platí
sa pretínajú v jednom bode práve vtedy, ak platí (BCA′)(CAB′) = −1") .
.
Nech body
sú nekolineárne a nech body ležia na stranách odpovedajúcim protiľahlým vrcholom trojuholníka , potom
priamky sa pretínajú v jednom bode práve vtedy, ak platí .
\)
Afinné zobrazenie
V ďalších kapitolách sa budeme zaoberať len euklidovským priestorom so zameraním . Zameriame sa prevažne len na dvojrozmerný a trojrozmerný euklidovský priestor - rovinu  a priestor
a priestor  . Pripomíname, že v euklidovskom priestore je definovaný skalárny súčin.
. Pripomíname, že v euklidovskom priestore je definovaný skalárny súčin.
so zameraním . Zameriame sa prevažne len na dvojrozmerný a trojrozmerný euklidovský priestor - rovinu a priestor . Pripomíname, že v euklidovskom priestore je definovaný skalárny súčin.
Definícia.
Nech sú euklidovské priestory. Zobrazenie
sú euklidovské priestory. Zobrazenie  sa nazýva afinné zobrazenie (AZ), ak obrazom ľubovoľných troch kolineárnych bodov sú totožné body, alebo kolineárne body, pričom ich deliaci pomer sa zachováva.
sa nazýva afinné zobrazenie (AZ), ak obrazom ľubovoľných troch kolineárnych bodov sú totožné body, alebo kolineárne body, pričom ich deliaci pomer sa zachováva.
Nech
sú euklidovské priestory. Zobrazenie sa nazýva afinné zobrazenie (AZ), ak obrazom ľubovoľných troch kolineárnych bodov sú totožné body, alebo kolineárne body, pričom ich deliaci pomer sa zachováva.
Z definície vyplýva, že afinné zobrazenie má vlastnosť lineárneho zobrazenia.
Veta.
Nech sú euklidovské priestory a je afinné zobrazenie. Potom platí
 + \alpha_1 (A_1)+...+ \alpha_k (A_k))=\small \alpha_0 f((A_0)) + \alpha_1f( (A_1))+...+ \alpha_k f((A_k))") ,
,
pričom .
.
Nech
sú euklidovské priestory a je afinné zobrazenie. Potom platí
,pričom
.
Dôkaz (urobíme pre ")
Nech je afinné zobrazenie a nech
= \alpha_1 (A_1)+ \alpha_k (A_2)") , kde
, kde  .
Pre ľubovoľný bod priamky
.
Pre ľubovoľný bod priamky  platí
platí
")
a pre jeho obraz") priamky
priamky f(A_2)}") bude
bude
= f(A_1)+ t (f(A_1)-f(A_2))")
Nech
je afinné zobrazenie a nech
, kde .
Pre ľubovoľný bod priamky platí
a pre jeho obraz
priamky bude
Poznámky.
- Ak
 , tak afinnému zobrazeniu hovoríme transformácia euklidovského priestoru .
, tak afinnému zobrazeniu hovoríme transformácia euklidovského priestoru . - Afinné zobrazenie je zrejme lineárne zobrazenie.
- Afinné zobrazenie zachováva lineárne kombinácie bodov.
♥ Príklad Tri body.
Afinné zobrazenie zobrazuje body ![\small A[2, 1], B[3, 0], C[1, 4]](https://lms.umb.sk/filter/tex/pix.php/3f4645363521a7c7ddf8f031272960e8.png "\small A[2, 1], B[3, 0], C[1, 4]") do bodov
do bodov ![\small A'[1, 6], B'[1, 9], C'[3, 1]](https://lms.umb.sk/filter/tex/pix.php/95a78b0e2732eb2134ca3344d270d527.png "\small A'[1, 6], B'[1, 9], C'[3, 1]") v tomto poradí. Kam sa zobrazí bod
v tomto poradí. Kam sa zobrazí bod ![\small P[5, 7]](https://lms.umb.sk/filter/tex/pix.php/12b32440cc18cd0bfb55063d1f30e434.png "\small P[5, 7]") resp. bod
resp. bod ![\small X[x, y]](https://lms.umb.sk/filter/tex/pix.php/efa1e94429b3777f84985fcc9f922d4c.png "\small X[x, y]") ? Prevzaté z práce (Chalmoviansky, Cvičenie 28).
? Prevzaté z práce (Chalmoviansky, Cvičenie 28).
Afinné zobrazenie
zobrazuje body do bodov v tomto poradí. Kam sa zobrazí bod resp. bod ? Prevzaté z práce (Chalmoviansky, Cvičenie 28).
Riešenie.
Prvý spôsob.
Bod vyjadrime ako lineárnu kombináciu bodov . V takom prípade musia existovať reálne čísla 
(1)
 .
.
Zobrazenie je lineárne, preto pre obraz ![\small P'[x',y']](https://lms.umb.sk/filter/tex/pix.php/c4981cddaf1f66c7b9b1f9ef84c5f482.png "\small P'[x',y']") bodu bude platiť
bodu bude platiť
(2)=a \cdot A'+b \cdot B'+c \cdot C'") , pričom tiež musí platiť
, pričom tiež musí platiť
Sústavu rovníc (1) a (2) vyjadríme v maticovom tvare a vyriešime.=\left(\begin{array}{ccc} 2&3&1 \\ 1&0&4\\ 1&1&1 \end{array}\right)\times \left(\begin{array}{ccc}a \\ b\\ c \end{array}\right)")
=\left(\begin{array}{ccc} 1&1&3 \\ 6&9&1\\ 1&1&1 \end{array}\right)\times \left(\begin{array}{ccc}a \\ b\\ c \end{array}\right)")
Po vyjadrení
 \times
\left(\begin{matrix}5 \\7 \\1\end{matrix}\right)=\left(\begin{matrix}-11 \\\frac{15}{2} \\\frac{9}{2}\end{matrix}\right)")
a po dosadení do (2) dostaneme riešenie
=
\left(\begin{matrix}
1 & 1 & 3 \\
6 & 9 & 1 \\
1 & 1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
-2 & -1 & 6 \\
\frac{3}{2} & \frac{1}{2} & \frac{-7}{2} \\
\frac{1}{2} & \frac{1}{2} & \frac{-3}{2}
\end{matrix}\right)
\times
\left(\begin{matrix}
5 \\
7 \\
1
\end{matrix}\right)") .
.
Po roznásobení
= \left(\begin{matrix}
1 & 1 & -2 \\
2 & -1 & 3 \\
0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
5 \\
7 \\
1
\end{matrix}\right)=
\left(\begin{matrix}10 \\6 \\1\end{matrix}\right)") .
.
Porovnaním ľavej a pravej strany dostaneme riešenie![\small P'=[10,6]](https://lms.umb.sk/filter/tex/pix.php/f4056527435d985bc1a407c62a354369.png "\small P'=[10,6]") .
.
Prvý spôsob.
Bod
vyjadrime ako lineárnu kombináciu bodov . V takom prípade musia existovať reálne čísla
(1)
.
Zobrazenie
je lineárne, preto pre obraz bodu bude platiť
(2)
, pričom tiež musí platiť
Sústavu rovníc (1) a (2) vyjadríme v maticovom tvare a vyriešime.
Pri násobení matíc typu  výsledná matica je typu
výsledná matica je typu  , preto matica rep.
matica bude typu 3 x 1, pričom prvok
, preto matica rep.
matica bude typu 3 x 1, pričom prvok  bude zrejme rovný 1. (Pri riešení sme použili kalkulátor
"Matrix calculator", ktorý je dostupný
Tu.
bude zrejme rovný 1. (Pri riešení sme použili kalkulátor
"Matrix calculator", ktorý je dostupný
Tu.
výsledná matica je typu , preto matica rep.
matica bude typu 3 x 1, pričom prvok bude zrejme rovný 1. (Pri riešení sme použili kalkulátor
"Matrix calculator", ktorý je dostupný
Tu.
Po vyjadrení
a po dosadení do (2) dostaneme riešenie
.
Po roznásobení
.
Porovnaním ľavej a pravej strany dostaneme riešenie
.
Dôsledok.
V našom príklade ak pre bod zvolíme všeobecné súradnice ![\small P=[x,y]](https://lms.umb.sk/filter/tex/pix.php/cb5958c2025b20cde42da0c659bb6c06.png "\small P=[x,y]") , tak riešenie môžeme zapísať v tvare
, tak riešenie môžeme zapísať v tvare
 =
\left(\begin{matrix}
1 & 1 & -2 \\
2 & -1 & 3 \\
0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
x \\
y \\
1
\end{matrix}\right)
=
\left(\begin{matrix}
x+y-2 \\
2x-y+3 \\
1
\end{matrix}\right).")
V našom príklade ak pre bod
zvolíme všeobecné súradnice , tak riešenie môžeme zapísať v tvare
Transfomačné rovnice afinného zobrazenia.
Porovnaním riadkov matíc dostaneme sústavu - transformačné rovnice zobrazenia z príkladu "Tri body"

Dosaďte súradnice![\small P[5, 7]](https://lms.umb.sk/filter/tex/pix.php/c41015f970c9b7be85aba7a97ad4bc91.png "\small P[5, 7]") do tejto sústavy a zistíte súradnice hľadaného bodu
do tejto sústavy a zistíte súradnice hľadaného bodu ![\small P'[10, 6]](https://lms.umb.sk/filter/tex/pix.php/90ab42afff53c904fa7219eec0f1751b.png "\small P'[10, 6]") .
.
Porovnaním riadkov matíc dostaneme sústavu - transformačné rovnice zobrazenia z príkladu "Tri body"
Dosaďte súradnice
do tejto sústavy a zistíte súradnice hľadaného bodu .
Pozrite si riešenie v GeoGebre
Tu.
Kompletné grafické riešenie pre afinné zobrazenie určené obrazmi troch bodov si stiahnete Tu.
Druhý spôsob riešenia príkladu "Tri body".
Sústavu môžeme riešiť aj dosadením súradníc dostávame![\small [5, 7]=a \cdot [2, 1]+b \cdot [3, 0]+c \cdot [1, 4]](https://lms.umb.sk/filter/tex/pix.php/cd188dc3a3f62ee19f485172daac0c7c.png "\small [5, 7]=a \cdot [2, 1]+b \cdot [3, 0]+c \cdot [1, 4]") a po roznásobení dostaneme
sústavu troch rovníc o troch nezámych
a po roznásobení dostaneme
sústavu troch rovníc o troch nezámych

Dostaneme riešenie .
.
V afinnom zobrazení sa kolineárnosť zachováva, preto platí . Po dosadení riešenia a súradníc bodov
. Po dosadení riešenia a súradníc bodov
![\small A'[1, 6], 'B[1, 9], C'[3, 1]](https://lms.umb.sk/filter/tex/pix.php/eaaa2b6f3ad10f9287f3a91a1563eba9.png "\small A'[1, 6], 'B[1, 9], C'[3, 1]") dostaneme
dostaneme
}=1 \cdot (-11) + 1 \cdot \frac{15}{2}+3 \cdot \frac{9}{2}=-11+21=10\\ \small {y(P')}=6 \cdot (-11) + 9 \cdot \frac{15}{2}+1 \cdot \frac{9}{2}=6.")
Sústavu môžeme riešiť aj dosadením súradníc dostávame
a po roznásobení dostaneme
sústavu troch rovníc o troch nezámych
Dostaneme riešenie
.
V afinnom zobrazení sa kolineárnosť zachováva, preto platí
. Po dosadení riešenia a súradníc bodov
dostaneme
Príklad.
Zobrazenie roviny do tej istej roviny, ktoré bodu
roviny do tej istej roviny, ktoré bodu  priradí bod
priradí bod =\frac{1}{3}A+ \frac{1}{3}B +\frac{1}{3}X") je afinné zobrazenie. Zobrazenie, ktoré trojuholníku s jedným premenným vrcholom
priradí jeho ťažisko je afinné zobrazenie. Pozrite si dôkaz, že takéto zobrazenie je afinné
Tu.
je afinné zobrazenie. Zobrazenie, ktoré trojuholníku s jedným premenným vrcholom
priradí jeho ťažisko je afinné zobrazenie. Pozrite si dôkaz, že takéto zobrazenie je afinné
Tu.
Zobrazenie
roviny do tej istej roviny, ktoré bodu
priradí bod je afinné zobrazenie. Zobrazenie, ktoré trojuholníku s jedným premenným vrcholom
priradí jeho ťažisko je afinné zobrazenie. Pozrite si dôkaz, že takéto zobrazenie je afinné
Tu.\)
Rôzne dimanzie
V predchádzajúcej kapitole sme riešili úlohy transfomácie euklidovských priestorov , keď  . V tejto kapitole sa budeme zaoberať prípadom
. V tejto kapitole sa budeme zaoberať prípadom  .
.
, keď . V tejto kapitole sa budeme zaoberať prípadom .
Príklad zobrazenie  .
.
Určte parameter tak, aby zobrazenie ktoré zobrazuje body
tak, aby zobrazenie ktoré zobrazuje body ![\small A[1, 0], B[0, 1],C[2, p]](https://lms.umb.sk/filter/tex/pix.php/f49c0b3f0bf1453ab07e57c5c4d6e0d0.png "\small A[1, 0], B[0, 1],C[2, p]") do bodov
do bodov ![\small A'[2,1,-1], B'[3,2,0], C'[1,0,2]](https://lms.umb.sk/filter/tex/pix.php/1fc10b7b65fbaf2986dee4ec72a5bc02.png "\small A'[2,1,-1], B'[3,2,0], C'[1,0,2]") v tomto poradí bolo afinné. Pre vhodné
v tomto poradí bolo afinné. Pre vhodné
.
Určte parameter
tak, aby zobrazenie ktoré zobrazuje body do bodov v tomto poradí bolo afinné. Pre vhodné
- určte obraz
") ľubovoľného bodu
ľubovoľného bodu ![\small P[x, y]](https://lms.umb.sk/filter/tex/pix.php/7e18944b1e340466fd42d0882b61be14.png "\small P[x, y]") ,
, - pomocou stopy bodu na kružnici popíšte a zostrojte obraz kružnice určenej bodmi
![\small A[1, 0], B[0, 1],C[2, 3]](https://lms.umb.sk/filter/tex/pix.php/d68e7110804078192907e062e23a2c9c.png "\small A[1, 0], B[0, 1],C[2, 3]") ,
, - takéto afinné zobrazenie geometricky interpretujte v GeoGebre.
Riešenie.
Body![\small P[x, y];P'[x', y']](https://lms.umb.sk/filter/tex/pix.php/15c79f2a8b929f1e644ab5dcf9d0f0fa.png "\small P[x, y];P'[x', y']") vyjadrime ako lineárne kombinácie
vyjadrime ako lineárne kombinácie
,
kde.Zápis v maticovom tvare V predchádzajúcej kapitole sme ukázali, že
 ,
,
kde je matica vzorov,  matica obrazov
matica obrazov
") ,
,
") .
.
Pomocou maticovej kalkulačky určíme inverznú maticu.
Roznásobením
=
\left(\begin{matrix}
2 & 3 & 1 \\
1 & 2 & 0 \\
-1 & 0 & 2 \\
1 & 1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
\frac{p-1}{p+1} & \frac{-2}{p+1} & \frac{2}{p+1} \\
\frac{-p}{p+1} & \frac{1}{p+1} & \frac{p}{p+1} \\
\frac{1}{p+1} & \frac{1}{p+1} & \frac{-1}{p+1}
\end{matrix}\right)
\times
\left(\begin{matrix}
x \\
y \\
z
\end{matrix}\right)
=
\left(\begin{matrix}
-x+3 \\
-x+2 \\
\frac{-\left(px\right)+3x+4y-4}{p+1} \\
1
\end{matrix}\right)") .
.
a porovaním ľavej a pravej strany dostaneme transformačné rovnice

Body
vyjadrime ako lineárne kombinácie
,
kde
.Zápis v maticovom tvare V predchádzajúcej kapitole sme ukázali, že
,
kde
je matica vzorov, matica obrazov
,
.
Pomocou maticovej kalkulačky určíme inverznú maticu.
Roznásobením
.
a porovaním ľavej a pravej strany dostaneme transformačné rovnice
Zobrazenie bude afinným práve vtedy, ak  . Súradnice obrazu ľubovoľného bodu určíme dosadením súradníc
. Súradnice obrazu ľubovoľného bodu určíme dosadením súradníc  do transformačných rovníc. Napríklad pre
do transformačných rovníc. Napríklad pre ![\small D[3,1]](https://lms.umb.sk/filter/tex/pix.php/d87ae2aa6878e674fae0498a5a39d4ee.png "\small D[3,1]") a
a  dostaneme
dostaneme ![\small D'[0,-1,0]](https://lms.umb.sk/filter/tex/pix.php/ce1572c3ffb0d63e754073ce9d707f14.png "\small D'[0,-1,0]") .
.
Kružnica určená bodmi má stred v bode ![\small S \left [\frac{1}{2}, \frac{1}{2} \right ]](https://lms.umb.sk/filter/tex/pix.php/1f862ef6072de16856c6272e4ef49ff7.png "\small S \left [\frac{1}{2}, \frac{1}{2} \right ]") a polomer
a polomer  a jej parametrické vyjadrenie má tvar pozrite si prácu "Kružnica, Veta 8"
Tu)
a jej parametrické vyjadrenie má tvar pozrite si prácu "Kružnica, Veta 8"
Tu)
![\small \left [\frac{3}{2}, \frac{3}{2} \right ] +\left [\frac{3 \sqrt{2} }{2}\cos t ,\frac{3 \sqrt{2} }{2}\sin t\right ]](https://lms.umb.sk/filter/tex/pix.php/540ac5353a475dc3c3788ff54a224437.png "\small \left [\frac{3}{2}, \frac{3}{2} \right ] +\left [\frac{3 \sqrt{2} }{2}\cos t ,\frac{3 \sqrt{2} }{2}\sin t\right ]") .
.
Po dosadení týchto parametrických súradníc do transformačných rovníc, zistíme, že obrazom je elipsa ležiaca v rovine . Jej parametrické vyjadrenie má tvar
. Jej parametrické vyjadrenie má tvar
![\small \left [\frac{3}{2}, \frac{1}{2}, \frac{3}{2} \right ] +\left [-\frac{1}{2}\cos t +\frac{3}{2}\sin t,-\frac{1}{2}\cos t +\frac{3}{2}\sin t, \frac{3}{2}\cos t +\frac{1}{2}\sin t\right ], t, 0, 2π](https://lms.umb.sk/filter/tex/pix.php/49c8dec70429e172c716a85f61c8fbd7.png "\small \left [\frac{3}{2}, \frac{1}{2}, \frac{3}{2} \right ] +\left [-\frac{1}{2}\cos t +\frac{3}{2}\sin t,-\frac{1}{2}\cos t +\frac{3}{2}\sin t, \frac{3}{2}\cos t +\frac{1}{2}\sin t\right ], t, 0, 2π") .
.
. Súradnice obrazu ľubovoľného bodu určíme dosadením súradníc do transformačných rovníc. Napríklad pre a dostaneme .
Kružnica určená bodmi
má stred v bode a polomer a jej parametrické vyjadrenie má tvar pozrite si prácu "Kružnica, Veta 8"
Tu).
Po dosadení týchto parametrických súradníc do transformačných rovníc, zistíme, že obrazom je elipsa ležiaca v rovine
. Jej parametrické vyjadrenie má tvar .
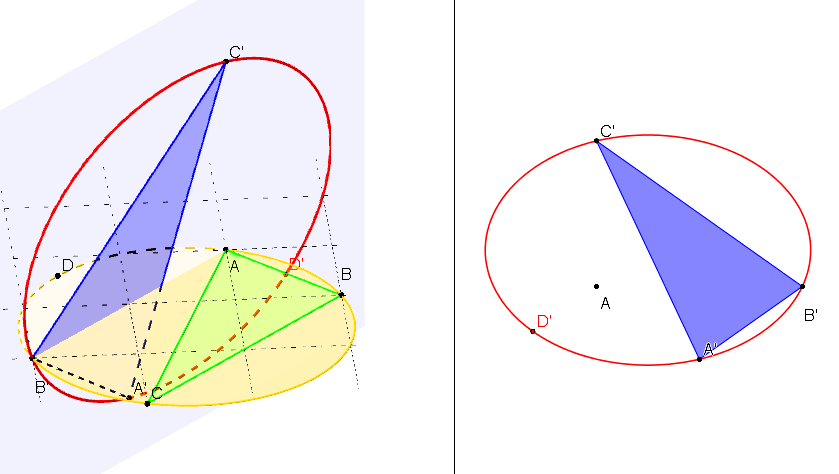
Príklad zobrazenie  .
.
Určte transformačné rovnice afinného zobrazenia, ktoré zobrazuje body![[2,1], [3,2],[0,1]](https://lms.umb.sk/filter/tex/pix.php/28fd534fed838f9e9fb5d23c36ee99c9.png "[2,1], [3,2],[0,1]") do bodov
do bodov ![[2], [0], [10]](https://lms.umb.sk/filter/tex/pix.php/3f02af62885a2f990cca75cf9f4dd6ad.png "[2], [0], [10]") v tomto poradí.
v tomto poradí.
Určte obraz ľubovoľného bodu a jeho stopu. Príklad je prevzatý z práce (Monoszová, 2.časť, Cvičenie 3.3.2a).
.
Určte transformačné rovnice afinného zobrazenia, ktoré zobrazuje body
do bodov v tomto poradí.
Určte obraz ľubovoľného bodu
a jeho stopu. Príklad je prevzatý z práce (Monoszová, 2.časť, Cvičenie 3.3.2a).
=
\left(\begin{matrix}
2 & 0 & 10 \\
1 & 1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
\frac{1}{2} & \frac{-3}{2} & \frac{3}{2} \\
0 & 1 & -1 \\
\frac{-1}{2} & \frac{1}{2} & \frac{1}{2}
\end{matrix}\right)
\times
\left(\begin{matrix}
x \\
y \\
1
\end{matrix}\right)=\left(\begin{matrix}-4x+2y+8 \\1\end{matrix}\right).")

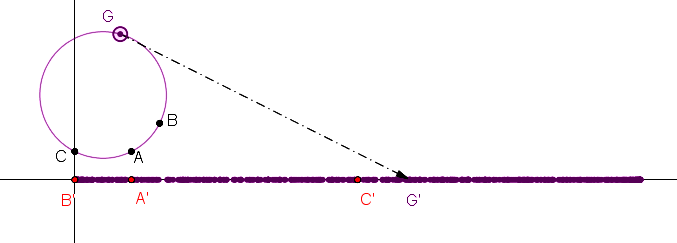
Príklad zobrazenie  .
.
Určte transformačné rovnice afinného zobrazenia, ktoré zobrazuje body![[1,2,3], [1,1,1],[1,0,1],[0,1,3]](https://lms.umb.sk/filter/tex/pix.php/d8a837e320e9e2612eac54ce0fc479c3.png "[1,2,3], [1,1,1],[1,0,1],[0,1,3]") do bodov
do bodov ![[5,4], [2,1], [1,0], [3,2]](https://lms.umb.sk/filter/tex/pix.php/5da5cd5c780cbe37d8f10ecca2ada2c3.png "[5,4], [2,1], [1,0], [3,2]") v tomto poradí.
v tomto poradí.
.
Určte transformačné rovnice afinného zobrazenia, ktoré zobrazuje body
do bodov v tomto poradí.
- Pokúste sa toto afinné zobrazenie geometricky interpretovať pomocou GeoGebry. Príklad je prevzatý z práce (Monoszová, 2.časť, Cvičenie 3.3.7).
- Určte obraz nejakej kružnice a jej stredu.
=
\left(\begin{matrix}
5 & 2 & 1 & 3 \\
4 & 1 & 0 & 2 \\
1 & 1 & 1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
1 & 0 & \frac{1}{2} & \frac{-3}{2} \\
-1 & 1 & -1 & 2 \\
1 & -1 & \frac{1}{2} & \frac{-1}{2} \\
-1 & 0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
x \\
y \\
1
\end{matrix}\right)=\left(\begin{matrix}x+y+z-1 \\x+y+z-2 \\1\end{matrix}\right).")

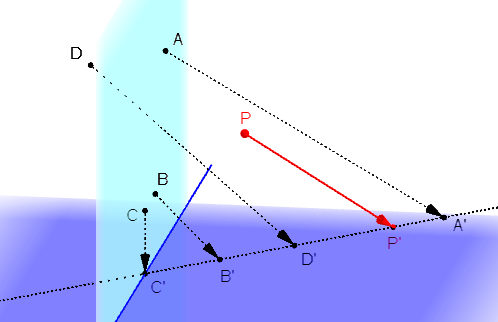
V ďalších kapitolách ukážeme, že afinné zobrazenie  je jednoznačne určené
je jednoznačne určené
je jednoznačne určené
- obrazmi
 lineárne nezávislými bodmi euklidovského priestoru alebo
lineárne nezávislými bodmi euklidovského priestoru alebo - obrazmi repéru euklidovského priestoru .
\)
Jednoznačnosť AZ
Afinné zobrazenie determinuje ďalšie zobrazenie  medzi vektorovými zložkami príslušných euklidovských vektorových priestorov.
medzi vektorovými zložkami príslušných euklidovských vektorových priestorov.
determinuje ďalšie zobrazenie medzi vektorovými zložkami príslušných euklidovských vektorových priestorov.
Definícia - asociované zobrazenie.
Nech je afinné zobrazenie. Zobrazenie nazývame asociovaným zobrazením k afinnému zobrazeniu ,
ak spĺňa nasledujúce podmienky:
je afinné zobrazenie. Zobrazenie nazývame asociovaným zobrazením k afinnému zobrazeniu ,
ak spĺňa nasledujúce podmienky:
Nech
je afinné zobrazenie. Zobrazenie nazývame asociovaným zobrazením k afinnému zobrazeniu ,
ak spĺňa nasledujúce podmienky:

 a
a  také,
že
také,
že =1") , platí
, platí
 = \sum_{i=0}^{k}{α_i f(A_i)}") .
.
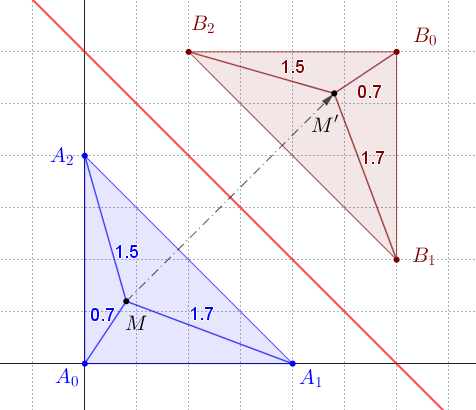
Predchádzajúca definícia vlastne hovorí, že asociované zobrazenie „zachováva” lineárne kombinácie bodov.
Veta - korektnosť definície asociovaného zobrazenia.
Zobrazenie je jednoznačné určené a je dobre definované. Ekvivalentný matematický zápis: nech

pre nejaké . Potom existuje práve jedno asociované zobrazenie také, že
. Potom existuje práve jedno asociované zobrazenie také, že
 = f∗(β_0B_0 + \cdot \cdot \cdot + β_kB_k)") .
.
Zobrazenie
je jednoznačné určené a je dobre definované. Ekvivalentný matematický zápis: nech
pre nejaké
. Potom existuje práve jedno asociované zobrazenie také, že
.
Dôkaz korektnosť definície asociovaného zobrazenia.
Existencia a jednoznačnosť asociovaného zobrazenia je daná obrazmi vektorov Vn.
Čo sa týka dobrej definovanosti zápisu v definicii asociovaného zobrazenia, z predpokladu vety vyplýva, že pre nejaké
pre nejaké  . Teda
. Teda
 .
.
Keďže zobrazenie je afinné, a teda zachováva lineárne kombinácie bodov, tak
 = f(O) + α_0f(A_0) + · · · + α_kf(A_k) = M' + α_0B_0 + · · · + α_kB_k") . Prezrite si applet z definície
. Prezrite si applet z definície
Existencia a jednoznačnosť asociovaného zobrazenia je daná obrazmi vektorov Vn.
Čo sa týka dobrej definovanosti zápisu v definicii asociovaného zobrazenia, z predpokladu vety vyplýva, že
pre nejaké . Teda
.
Keďže zobrazenie
je afinné, a teda zachováva lineárne kombinácie bodov, tak
. Prezrite si applet z definície
Lineárne nezávislá množina bodov.
Nech je množina bodov euklidovského priestoru. Je celkom prirodzené zaviesť pojem lineárne nezávislých bodov,
ako množinu lineárne nezávislých vektorov
je množina bodov euklidovského priestoru. Je celkom prirodzené zaviesť pojem lineárne nezávislých bodov,
ako množinu lineárne nezávislých vektorov  .
.
Nech
je množina bodov euklidovského priestoru. Je celkom prirodzené zaviesť pojem lineárne nezávislých bodov,
ako množinu lineárne nezávislých vektorov .
Poznámka.
Z predchádzajúcej definície je zrejmé, že v euklidovskom rozmernom priestore existuje najviac  lineárne nezávislých bodov. Naviac tento počet sa dá dosiahnuť.
lineárne nezávislých bodov. Naviac tento počet sa dá dosiahnuť.
Z predchádzajúcej definície je zrejmé, že v euklidovskom
rozmernom priestore existuje najviac lineárne nezávislých bodov. Naviac tento počet sa dá dosiahnuť.
V kapitole "Lineárna kombinácia bodov" sme dokázali vetu
Ľubovoľný bod  sa dá jednoznačne vyjadriť v tvare
sa dá jednoznačne vyjadriť v tvare
,
kde.
sa dá jednoznačne vyjadriť v tvare
,
kde
.
Na základe tohto tvrdenia a definície nezávislých bodov, môžeme povedať, že ľubovoľný bod euklidovského priestoru  sa dá
jednoznačne vyjadriť ako ich lineárna kombinácia.
sa dá
jednoznačne vyjadriť ako ich lineárna kombinácia.
Poznámka o lineárnych zobrazeniach.
Z lineárnej algebry poznáme tvrdenie, že každé lineárne zobrazenie je jednoznačne dané obrazmi prvkov nejakej bázy
priestoru
je jednoznačne dané obrazmi prvkov nejakej bázy
priestoru  .
.
sa dá
jednoznačne vyjadriť ako ich lineárna kombinácia.
Poznámka o lineárnych zobrazeniach.
Z lineárnej algebry poznáme tvrdenie, že každé lineárne zobrazenie
je jednoznačne dané obrazmi prvkov nejakej bázy
priestoru .
Dôsledok obraz repéra.
Nech je repér priestoru
je repér priestoru  a ľubovoľný bod
a ľubovoľný bod  . Ďalej
nech
. Ďalej
nech  sú vektory vektorového priestoru
sú vektory vektorového priestoru  . Potom existuje jediné afinné
zobrazenie také, že
. Potom existuje jediné afinné
zobrazenie také, že
=B") a
a =\pmb {b_i}") pre
pre  .
.
Nech
je repér priestoru a ľubovoľný bod . Ďalej
nech sú vektory vektorového priestoru . Potom existuje jediné afinné
zobrazenie také, že
a pre .
Dôkaz nájdete v učebniciach z lineárnej algebry.
Veta (Jednoznačnosť afinného zobrazenia).
Nech je afinné zobrazenie. Potom je jednoznačne určené obrazmi  lineárne nezávislých bodov z .
lineárne nezávislých bodov z .
Nech
je afinné zobrazenie. Potom je jednoznačne určené obrazmi lineárne nezávislých bodov z .
Dôkaz.
Nech=B_0, . . . , f(A_n)=B_n") . V súlade s definíciou nezávislých bodov, vektory
. V súlade s definíciou nezávislých bodov, vektory

sú lineárne nezávislé. Keďže afinné zobrazenie je zároveň aj lineárne, tak pre obrazy vektorov v asociovanom afinnom zobrazení platí
v asociovanom afinnom zobrazení platí
= f^*(A_i-A_0)=f(A_i)-f(A_0)=B_i-B_0") pre
pre  .
.
Podľa dôsledku "obraz repéra" je takto jednoznačne definované afinné zobrazenie. Treba len overiť, či takto definované zobrazenia spĺňa podmienku, že=\pmb {b_i}") .
.
(Urobte to ako cvičenie!)
Nech
. V súlade s definíciou nezávislých bodov, vektory
sú lineárne nezávislé. Keďže afinné zobrazenie je zároveň aj lineárne, tak pre obrazy vektorov
v asociovanom afinnom zobrazení platí
pre .
Podľa dôsledku "obraz repéra" je takto jednoznačne definované afinné zobrazenie. Treba len overiť, či takto definované zobrazenia spĺňa podmienku, že
.
(Urobte to ako cvičenie!)
Príklad.
Dané sú body afinného priestoru![\small \mathcal{A}_4: A[2, 4, 5, 6]; B[−7, 4, 5, 6]; C[6, 11, 3, 7]; D[−3, −10, 9, 4]; E[−3, 11, 3, 7]](https://lms.umb.sk/filter/tex/pix.php/9b09fbccf9c7067f710d5ec3a4f09993.png "\small \mathcal{A}_4: A[2, 4, 5, 6]; B[−7, 4, 5, 6]; C[6, 11, 3, 7]; D[−3, −10, 9, 4]; E[−3, 11, 3, 7]") . Zistite, či sústava
bodov
. Zistite, či sústava
bodov  je afinne (ne)závislá a vypočítajte dimenziu afinného podpriestoru generovaného sústavou (dimenziu obalu ).
je afinne (ne)závislá a vypočítajte dimenziu afinného podpriestoru generovaného sústavou (dimenziu obalu ).
Dané sú body afinného priestoru
. Zistite, či sústava
bodov je afinne (ne)závislá a vypočítajte dimenziu afinného podpriestoru generovaného sústavou (dimenziu obalu ).
Riešenie.
Množina bodov je afinne nezávislá, ak sústava vektorov

je lineárne nezávislá. Pre súradnice týchto vektorov dostaneme
; \overrightarrow{AC}= (4, 7, −2, 1);\overrightarrow{AD} = (1, −14, 4, −2); \overrightarrow{AE}= (−5, 7, −2, 1)") .
.
Sústava vektorov W je lineárne nezávislá, ak rovnosť

je splnená práve len pre . V našom prípade to nie je splnené lebo hodnosť matice
. V našom prípade to nie je splnené lebo hodnosť matice
∼
\left(\begin{matrix}
-9 & 0 & 0 & 0 \\
0 & 7 & -2 & 1 \\
0 & -14 & 4 & -2 \\
0 & 7 & -2 & 1
\end{matrix}\right)∼
\left(\begin{matrix}
-9 & 0 & 0 & 0 \\
0 & 7 & -2 & 1 \\
0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0
\end{matrix}\right)")
je dva. Teda hodnosť je menšia ako počet vektorov, preto sústava je lineárne závislá a teda body  sú afinne závisle. Z poslednej matice vyplýva,
že dva vektory
sú afinne závisle. Z poslednej matice vyplýva,
že dva vektory  sú lineárne nezávislé a vektory
sú lineárne nezávislé a vektory  sú ich lineárne kombinácie.
Preto dimenzia podpriestoru
sú ich lineárne kombinácie.
Preto dimenzia podpriestoru  je rovná dvom. Parametrické vyjadrenie tohto podpriestoru môžeme vyjadriť ako
je rovná dvom. Parametrické vyjadrenie tohto podpriestoru môžeme vyjadriť ako
 .
.
To znamená, že body ležia v rovine  = S") .
.
Množina bodov
je afinne nezávislá, ak sústava vektorov
je lineárne nezávislá. Pre súradnice týchto vektorov dostaneme
.
Sústava vektorov W je lineárne nezávislá, ak rovnosť
je splnená práve len pre
. V našom prípade to nie je splnené lebo hodnosť matice
je dva. Teda hodnosť je menšia ako počet vektorov, preto sústava
je lineárne závislá a teda body sú afinne závisle. Z poslednej matice vyplýva,
že dva vektory sú lineárne nezávislé a vektory sú ich lineárne kombinácie.
Preto dimenzia podpriestoru je rovná dvom. Parametrické vyjadrenie tohto podpriestoru môžeme vyjadriť ako
.
To znamená, že body
ležia v rovine .
Poznámky.
- Nech je -rozmerný euklidovský priestor so zameraním a
nech
 je afinná transformácia. Potom môžeme definovať asociované zobrazenie
je afinná transformácia. Potom môžeme definovať asociované zobrazenie  afinného zobrazenia aj nasledovne:
afinného zobrazenia aj nasledovne:
 \rightarrow V_n(\mathbb R)") ,
,  \rightarrow f(X − Y ) := f(X) − f(Y )")
- Asociované zobrazenie je vlastne "reštrikcia" zobrazenia na vektorový priestor. Zobrazuje vektory
so zamerania na vektory toho istého zamerania.
\)
Analytické vyjadrenie
Nech je v je afinné zobrazenie , v ktorom sa repér  zobrazí na repér
zobrazí na repér  , pričom pre súradnice obrazov platí
, pričom pre súradnice obrazov platí
![\small f(O)=[r_1,r_2,...,r_m]](https://lms.umb.sk/filter/tex/pix.php/c5eda1f88fc333cd5842ee547a31e19d.png "\small f(O)=[r_1,r_2,...,r_m]")
=(a^i_1,a^i_2,...,a^i_m)") .
.
Nech![\small X=[x_1,x_2,...,x_n]](https://lms.umb.sk/filter/tex/pix.php/a5dcae89eca8a64e02819035d3279438.png "\small X=[x_1,x_2,...,x_n]") je bod euklidovského priestoru, potom pre jeho obraz
je bod euklidovského priestoru, potom pre jeho obraz ![\small X'=[x'_1,x'_2,...,x'_m]](https://lms.umb.sk/filter/tex/pix.php/6ab3a2d90723d2e20d5aa14c22d84357.png "\small X'=[x'_1,x'_2,...,x'_m]") bude platiť
bude platiť
(AV)=\left(\begin{array}{ccc} a^1_1&...&a^n_1 \\ a^1_2&...&a^n_2 \\...
\\ a^1_n&...&a^n_m\end{array}\right)\times \left(\begin{array}{ccc}x_1 \\ x_2\\ ...
\\x_n \end{array}\right) + \left(\begin{array}{ccc}r_1 \\ r_2\\ ...\\r_m \end{array}\right)") .
.
je afinné zobrazenie , v ktorom sa repér
zobrazí na repér , pričom pre súradnice obrazov platí
.
Nech
je bod euklidovského priestoru, potom pre jeho obraz bude platiť
(AV)
.
Zápis (AV) nazývame analytické vyjadrenie afinného zobrazenia  vzhľadom k afinnej súradnicovej sústave
.
vzhľadom k afinnej súradnicovej sústave
.
vzhľadom k afinnej súradnicovej sústave
.
Namiesto označenia ") budeme tiež používať označenie
budeme tiež používať označenie
 . V ďalších kapitolách sa zameriame na afinné zobrazenia v euklidovskej rovine,
pričom upriamime pozornosť na analytické vyjadrenia zhodných (zhodnostných) zobrazení v rovine.
. V ďalších kapitolách sa zameriame na afinné zobrazenia v euklidovskej rovine,
pričom upriamime pozornosť na analytické vyjadrenia zhodných (zhodnostných) zobrazení v rovine.
budeme tiež používať označenie
. V ďalších kapitolách sa zameriame na afinné zobrazenia v euklidovskej rovine,
pričom upriamime pozornosť na analytické vyjadrenia zhodných (zhodnostných) zobrazení v rovine.
Úlohy.
- Určte analytické vyjadrenie identického zobrazenia euklidovskej roviny - identity.
- Zistite, či rovnoľahlosť v rovine
") pre pevne zvolený stred rovnoľahlosti
pre pevne zvolený stred rovnoľahlosti  a koeficient
rovnoľahlosti
a koeficient
rovnoľahlosti  je afinné zobrazenie.
je afinné zobrazenie.
Riešenie úlohy č. 1.
Pre identitu platí, že každý bod roviny sa zobrazí sám na seba, t. j=X") . Označme súradnice vzoru ako usporiadanú dvojicu
. Označme súradnice vzoru ako usporiadanú dvojicu ") a
súradnice jeho obrazu v zobrazení ako
a
súradnice jeho obrazu v zobrazení ako ") . Keďže ide o identické zobrazenie, tak musí platiť
. Keďže ide o identické zobrazenie, tak musí platiť
=(x,y)") .
.
Rovnosť usporiadaných dvojíc nastane práve vtedy, keď sa rovnajú odpovedajúce zložky. Teda, keď súčasne platia rovnosti .
.
Táto jednoduchá sústava dvoch rovníc je analytickým vyjadrením identity. Ak zapíšeme získanú sústavu dvoch rovníc v maticovom tvare, tak získame rovnicu v tvare
=\left(\begin{array}{ccc} 1&0 \\ 0&1 \end{array}\right)\times \left(\begin{array}{ccc}x \\ y \end{array}\right) + \left(\begin{array}{ccc}0 \\ 0 \end{array}\right)")
alebo v riadkovom zápise (maticou násobíme sprava!)
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} 1 & 0 \\ 0 & 1 \\ \end{array} \right)") .
.
Určte analytické vyjadrenie identického zobrazenia euklidovského priestoru .
.
Riešenie úlohy č. 2 je v nasledujúcej kapitole.
Pre identitu platí, že každý bod roviny sa zobrazí sám na seba, t. j
. Označme súradnice vzoru ako usporiadanú dvojicu a
súradnice jeho obrazu v zobrazení ako . Keďže ide o identické zobrazenie, tak musí platiť
.
Rovnosť usporiadaných dvojíc nastane práve vtedy, keď sa rovnajú odpovedajúce zložky. Teda, keď súčasne platia rovnosti
.
Táto jednoduchá sústava dvoch rovníc je analytickým vyjadrením identity. Ak zapíšeme získanú sústavu dvoch rovníc v maticovom tvare, tak získame rovnicu v tvare
alebo v riadkovom zápise (maticou násobíme sprava!)
.
Určte analytické vyjadrenie identického zobrazenia euklidovského priestoru
.
Riešenie úlohy č. 2 je v nasledujúcej kapitole.
Rozšírené afinné súradnice.
Pri riešení príkladu "Tri body" sme použili matice, ktorých posledné riadky korešpondovali s podmienkou lineárnej kombinácie bodov: . V dôsledku tohto príkladu sme
vlastne použili rozšírené afinné súradnice, pomocou ktorých možno zjednodušiť zápis analytické vyjadrenie afinného zobrazenia. Rozšírené afinné súradnice sprehľadnia zápis zobrazení. Súradnice bodu
. V dôsledku tohto príkladu sme
vlastne použili rozšírené afinné súradnice, pomocou ktorých možno zjednodušiť zápis analytické vyjadrenie afinného zobrazenia. Rozšírené afinné súradnice sprehľadnia zápis zobrazení. Súradnice bodu ![\small X = [x_1 , . . . , x_n ]](https://lms.umb.sk/filter/tex/pix.php/1d6bb0fe4aa343a6996a595b0930f987.png "\small X = [x_1 , . . . , x_n ]") nahradíme súradnicami
nahradíme súradnicami ![\small [ x_1 , . . . , x_n,1 ]](https://lms.umb.sk/filter/tex/pix.php/a2baa221eb1ab835da5a2af8b84374ee.png "\small [ x_1 , . . . , x_n,1 ]") a súradnice
vektora
a súradnice
vektora ") nahradíme súradnicami
nahradíme súradnicami ") .
Pre takto zavedené rozšírenie platí obvyklá aritmetika s bodmi a vektormi z euklidovských priestorov, ako aj počítanie s lineárnymi kombináciami.
.
Pre takto zavedené rozšírenie platí obvyklá aritmetika s bodmi a vektormi z euklidovských priestorov, ako aj počítanie s lineárnymi kombináciami.
V rozšírených afinných súradniciach možno potom písať analytické vyjadrenie zobrazenia takto
=
\left(
\begin{array}{} a_1^1 & a_1^2 & · · · &a_1^n & r_1 \\
a_2^1 & a_2^2 & · · · &a_2^{n} & r_2 \\
\; \; ···\\
a_m^1 & a_m^2 & · · · &a_m^n & r_m \\
0 & 0 & · · · & 0& 1 \\ \end{array}\right)
\times
\left(
\begin{array}{} x_1 \\ x_2 \\ · · · \\ x_n \\ 1 \end{array}\right)") ,
,
pričom má ten istý význam ako pri afinných súradniciach.
\)
má ten istý význam ako pri afinných súradniciach.
\)
Pri riešení príkladu "Tri body" sme použili matice, ktorých posledné riadky korešpondovali s podmienkou lineárnej kombinácie bodov:
. V dôsledku tohto príkladu sme
vlastne použili rozšírené afinné súradnice, pomocou ktorých možno zjednodušiť zápis analytické vyjadrenie afinného zobrazenia. Rozšírené afinné súradnice sprehľadnia zápis zobrazení. Súradnice bodu nahradíme súradnicami a súradnice
vektora nahradíme súradnicami .
Pre takto zavedené rozšírenie platí obvyklá aritmetika s bodmi a vektormi z euklidovských priestorov, ako aj počítanie s lineárnymi kombináciami.
V rozšírených afinných súradniciach možno potom písať analytické vyjadrenie zobrazenia takto
,
pričom
má ten istý význam ako pri afinných súradniciach.
\)
Rovnoľahlosť a posunutie
V tejto kapitole sa budeme zaoberať transformáciami euklidovskej roviny - posunutím a rovnoľahlosťou. Tieto zobrazenia v syntetickom poňatí geometrie definujeme
jednoducho pomocou
- pevne zvoleného vektora -posunutie,
- pevne zvoleného bodu a skalára - homotétia alebo tiež rovnoľahlosť. Ukážeme, že tieto zobrazenia sú afinné a určíme ich transformačné matice.
Rovnoľahlosť  pre pevne zvolený stred rovnoľahlosti a koeficient
rovnoľahlosti
pre pevne zvolený stred rovnoľahlosti a koeficient
rovnoľahlosti  je afinné zobrazenie.
je afinné zobrazenie.
pre pevne zvolený stred rovnoľahlosti a koeficient
rovnoľahlosti je afinné zobrazenie.
Dôkaz.
Rovnoľahlosť") v euklidovskej rovine bodu priraďuje bod
v euklidovskej rovine bodu priraďuje bod  taký, že pre deliaci pomer bodov
taký, že pre deliaci pomer bodov  platí
platí =k") . Z definície deliaceho pomeru dostaneme vzťah
. Z definície deliaceho pomeru dostaneme vzťah
(h)") ,
,
kde![\small S[s_1,s_2] \in \mathbb E_2](https://lms.umb.sk/filter/tex/pix.php/a1c26e689f4a4cb3e1f0d602a9905e22.png "\small S[s_1,s_2] \in \mathbb E_2") je zvolený stred rovnoľahlosti a je reálny koeficient.
je zvolený stred rovnoľahlosti a je reálny koeficient.
V prvom kroku musíme ukázať (dokázať), že obrazom troch kolineárnych bodov v rovnoľahlosti sú opäť tri kolineárne body. Najskôr dokážeme toto tvrdenie analyticky.
Nech![\small A[a_1,a_2],B[b_1,b_2],C[c_1,c_2]](https://lms.umb.sk/filter/tex/pix.php/69afe175d7ed037d38d7f0b09adfa934.png "\small A[a_1,a_2],B[b_1,b_2],C[c_1,c_2]") sú ľubovoľné tri navzájom rôzne kolineárne body. Dvomi bodmi je určená práve jediná priamka
sú ľubovoľné tri navzájom rôzne kolineárne body. Dvomi bodmi je určená práve jediná priamka  . Podľa predpokladu bod je bodom priamky . V takom prípade existuje parameter
. Podľa predpokladu bod je bodom priamky . V takom prípade existuje parameter  taký, že platia rovnosti
taký, že platia rovnosti
") ,
,
") .
.
Označme![\small A'[a'_1,a'_2],B'[b'_1,b'_2],C'[c'_1,c'_2]](https://lms.umb.sk/filter/tex/pix.php/6b451b3f2a1bcbe476b54b08ff273ea9.png "\small A'[a'_1,a'_2],B'[b'_1,b'_2],C'[c'_1,c'_2]") obrazy bodov v rovnoľahlosti . Potom súradnice týchto bodov musia spĺňať vzťah (h), čo vedie k rovnostiam
obrazy bodov v rovnoľahlosti . Potom súradnice týchto bodov musia spĺňať vzťah (h), čo vedie k rovnostiam
")
")
")
pre . Upravujme posledný výraz
. Upravujme posledný výraz
=s_i-ks_i+k(a_i-t(b_i-a_i))=")
![\small =s_i-ks_i+ka_i-kt(b_i-a_i))= [𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖)]−𝑘𝑡(𝑏_𝑖−𝑠_𝑖−𝑎_𝑖+𝑠_𝑖)=](https://lms.umb.sk/filter/tex/pix.php/c681a01115932036b0e5d058fc3e367d.png "\small =s_i-ks_i+ka_i-kt(b_i-a_i))= [𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖)]−𝑘𝑡(𝑏_𝑖−𝑠_𝑖−𝑎_𝑖+𝑠_𝑖)=")
![\small=𝑎′_𝑖−𝑘𝑡[(𝑏_𝑖−𝑠_𝑖)−(𝑎_𝑖−𝑠_𝑖)]=](https://lms.umb.sk/filter/tex/pix.php/52d68a8f94debc432367bf18d957ad68.png "\small=𝑎′_𝑖−𝑘𝑡[(𝑏_𝑖−𝑠_𝑖)−(𝑎_𝑖−𝑠_𝑖)]=")
![\small=𝑎′_𝑖−𝑡[(𝑠_𝑖+𝑘(𝑏_𝑖−𝑠_𝑖))−(𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖))]=](https://lms.umb.sk/filter/tex/pix.php/6b742adedf4d1e34816b71e1be573abd.png "\small=𝑎′_𝑖−𝑡[(𝑠_𝑖+𝑘(𝑏_𝑖−𝑠_𝑖))−(𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖))]=")
![\small=𝑎′_𝑖+𝑡[𝑏′_𝑖−𝑎′_𝑖]](https://lms.umb.sk/filter/tex/pix.php/a95d131333c85242a71483af33b7ce7f.png "\small=𝑎′_𝑖+𝑡[𝑏′_𝑖−𝑎′_𝑖]") .
.
Dostali sme výraz, ktorý nám hovorí, že obraz bodu v zobrazení
bodu v zobrazení ") leží na priamke určenej
bodmi
leží na priamke určenej
bodmi  . Odkiaľ vyplýva, že zobrazenie zachováva kolineárnosť a preto je afinným zobrazením.
. Odkiaľ vyplýva, že zobrazenie zachováva kolineárnosť a preto je afinným zobrazením.
Syntetický (konštrukčný) dôkaz tvrdenia, že rovnoľahlosť zachováva kolineárnosť je pomerne jednoduchý. Stačí využiť vlastnosť, že v rovnoľahlosti sa rovnobežnosť zachováva. Pozrite si nasledujúci obrázok. Vlastnosť zachovania kolineárnosti vyplýva z podobnosti trojuholníkov a
a  .
.
Rovnoľahlosť
v euklidovskej rovine bodu priraďuje bod taký, že pre deliaci pomer bodov platí . Z definície deliaceho pomeru dostaneme vzťah(h)
,
kde
je zvolený stred rovnoľahlosti a je reálny koeficient.
V prvom kroku musíme ukázať (dokázať), že obrazom troch kolineárnych bodov v rovnoľahlosti sú opäť tri kolineárne body. Najskôr dokážeme toto tvrdenie analyticky.
Nech
sú ľubovoľné tri navzájom rôzne kolineárne body. Dvomi bodmi je určená práve jediná priamka . Podľa predpokladu bod je bodom priamky . V takom prípade existuje parameter taký, že platia rovnosti
,.Označme
obrazy bodov v rovnoľahlosti . Potom súradnice týchto bodov musia spĺňať vzťah (h), čo vedie k rovnostiam
pre
. Upravujme posledný výraz
.
Dostali sme výraz, ktorý nám hovorí, že obraz
bodu v zobrazení leží na priamke určenej
bodmi . Odkiaľ vyplýva, že zobrazenie zachováva kolineárnosť a preto je afinným zobrazením.
Syntetický (konštrukčný) dôkaz tvrdenia, že rovnoľahlosť zachováva kolineárnosť je pomerne jednoduchý. Stačí využiť vlastnosť, že v rovnoľahlosti sa rovnobežnosť zachováva. Pozrite si nasledujúci obrázok. Vlastnosť zachovania kolineárnosti vyplýva z podobnosti trojuholníkov
a .
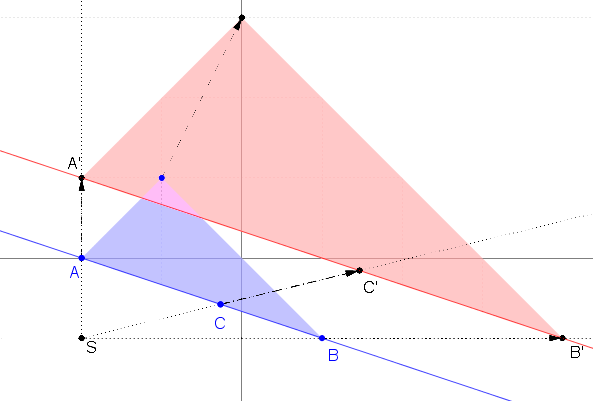
Vzťah (h) je vlastne parametrické vyjadrenie a predstavuje transformáciu roviny , ktorá bodu ![\small X[x,y] \in \mathbb E_2](https://lms.umb.sk/filter/tex/pix.php/e08e134049c7de5555f4ceb42445fae2.png "\small X[x,y] \in \mathbb E_2") v rovnoľahlosti priradí bod
v rovnoľahlosti priradí bod
![\small X'[x',y'] \in \mathbb E_2](https://lms.umb.sk/filter/tex/pix.php/95b6089b0fb9d1a688d01934e8311f0f.png "\small X'[x',y'] \in \mathbb E_2") . Tento vzťah môžeme po jednoduchej úprave upraviť na sústavu dvoch rovníc o dvoch neznámych
. Tento vzťah môžeme po jednoduchej úprave upraviť na sústavu dvoch rovníc o dvoch neznámych 

 ,
,
kde=s_1 (1-k);𝑜′_2=𝑠_2 (1-k)") .
.
Usporiadaná dvojica![\small [s_1(1-k),𝑠_2(1-k)]](https://lms.umb.sk/filter/tex/pix.php/2f077ed49890c27918ec06940cf36776.png "\small [s_1(1-k),𝑠_2(1-k)]") predstavuje súradnice obrazu počiatku
predstavuje súradnice obrazu počiatku ![\small O[0,0]](https://lms.umb.sk/filter/tex/pix.php/ab786f1f1348064c3558f8b3acc41e8c.png "\small O[0,0]") v rovnoľahlosti .
K dôkazu stačí dosadiť súradnice začiatku do vzťahu (h).
v rovnoľahlosti .
K dôkazu stačí dosadiť súradnice začiatku do vzťahu (h).
Preskúmajme aké budú obrazy súradnicových ortonormálnych vektorov![\small \vec e_1=E_1-O=[1,0];\vec e_2=E_2-O=[0,1]](https://lms.umb.sk/filter/tex/pix.php/65697fba787ddf89773c3cd0e64c3e7b.png "\small \vec e_1=E_1-O=[1,0];\vec e_2=E_2-O=[0,1]") v rovnoľahlosti . Dosadením súradníc
bodov
v rovnoľahlosti . Dosadením súradníc
bodov  do vzťahu (h) dostaneme pre obrazy
do vzťahu (h) dostaneme pre obrazy 
![\small E_1'=[k+s_1(1-k),s_2(1-k)],E_2'=[s_1(1-k),k+s_2(1-k)]](https://lms.umb.sk/filter/tex/pix.php/a57bd414561b5998b36d7af96b142cda.png "\small E_1'=[k+s_1(1-k),s_2(1-k)],E_2'=[s_1(1-k),k+s_2(1-k)]") ,
,
po dosadení súradníc![\small O'[s_1(1-k),𝑠_2(1-k)]](https://lms.umb.sk/filter/tex/pix.php/2d7c09fd2b900d768d74871f7bc77ed7.png "\small O'[s_1(1-k),𝑠_2(1-k)]") do rozdielov
do rozdielov  dostaneme súradnice obrazov
dostaneme súradnice obrazov 
![\small \vec e_1'=([k+s_1(1-k)]-[s_1(1-k)],[s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(k,0)};\\ \small \vec e_2'=([s_1(1-k)]-[s_1(1-k)],[k+s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(0,k)}](https://lms.umb.sk/filter/tex/pix.php/e7a44d83fd3a9987dbebea6aff9a1390.png "\small \vec e_1'=([k+s_1(1-k)]-[s_1(1-k)],[s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(k,0)};\\ \small \vec e_2'=([s_1(1-k)]-[s_1(1-k)],[k+s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(0,k)}")
Súradnice obrazov súradnicových ortonormálnych vektorov sú závisé len od koeficienta .
.
V súlade s definíciou analytického vyjadrenia afinného zobrazenia môžeme vyjadriť rovnoľahlosť v rovine pomocou rozšíreného maticového tvaru takto:
v rovine pomocou rozšíreného maticového tvaru takto:
 =
\left(\begin{array}{} k & 0 & o'_1 \\ 0 & k & o'_2 \\ 0 & 0 & 1 \\ \end{array} \right)
\times
\left( \begin{array}{} x \\ y \\ 1 \end{array} \right)") .
.
, ktorá bodu v rovnoľahlosti priradí bod
. Tento vzťah môžeme po jednoduchej úprave upraviť na sústavu dvoch rovníc o dvoch neznámych
,
kde
.
Usporiadaná dvojica
predstavuje súradnice obrazu počiatku v rovnoľahlosti .
K dôkazu stačí dosadiť súradnice začiatku do vzťahu (h).
Preskúmajme aké budú obrazy súradnicových ortonormálnych vektorov
v rovnoľahlosti . Dosadením súradníc
bodov do vzťahu (h) dostaneme pre obrazy
,
po dosadení súradníc
do rozdielov dostaneme súradnice obrazov
Súradnice obrazov súradnicových ortonormálnych vektorov sú závisé len od koeficienta
.
V súlade s definíciou analytického vyjadrenia afinného zobrazenia môžeme vyjadriť rovnoľahlosť
v rovine pomocou rozšíreného maticového tvaru takto:
.
Poznámky.
- Maticu
") nazývame matica afinného zobrazenia (rovnoľahlosti), pričom prvky prvého (resp. druhého) stĺpca tejto matice predstavujú súradnice vektora
nazývame matica afinného zobrazenia (rovnoľahlosti), pričom prvky prvého (resp. druhého) stĺpca tejto matice predstavujú súradnice vektora  (resp. vektora
(resp. vektora  ), ktorý je obrazom vektora
), ktorý je obrazom vektora  (resp. vektora
(resp. vektora  ) v danej rovnoľahlosti. V rovnoľahlosti rovnobežnosť sa zachováva, preto vektory a
) v danej rovnoľahlosti. V rovnoľahlosti rovnobežnosť sa zachováva, preto vektory a  sú lineárne závislé, pričom
sú lineárne závislé, pričom  .
. - V transformačných rovniciach koeficienty pri neznámej
 (resp.
(resp.  ) predstavujú súradnice vektora
(resp. vektora
) predstavujú súradnice vektora
(resp. vektora  ).
).
Cvičenie.
V rovnoľahlosti, ktorá zobrazuje![\small A[-2,0] \rightarrow A'[-2,1],B[1,-1] \rightarrow B'[4,-1],C[-1,1] \rightarrow C'[0,3]](https://lms.umb.sk/filter/tex/pix.php/36c60da4c8ebc2dcdbeffef4aa2df2b6.png "\small A[-2,0] \rightarrow A'[-2,1],B[1,-1] \rightarrow B'[4,-1],C[-1,1] \rightarrow C'[0,3]") nájdite obrazy
začiatku a jednotkových vektorov
nájdite obrazy
začiatku a jednotkových vektorov  ,
kde
,
kde ![\small E_1=[1,0],E_2=[0,1]](https://lms.umb.sk/filter/tex/pix.php/9348bdf47b8863f702b935e218adefe1.png "\small E_1=[1,0],E_2=[0,1]") .
.
V rovnoľahlosti, ktorá zobrazuje
nájdite obrazy
začiatku a jednotkových vektorov ,
kde .
Riešenie. Využite riešenie príkladu "Tri body" v kapitole "Afinné zobrazenie". Pozrite si grafické riešenie
Tu.
Úloha.
Vytvorte applet v GeoGebre, ktorý bude generovať transformačné rovnice pre posunutie v rovine.
Vytvorte applet v GeoGebre, ktorý bude generovať transformačné rovnice pre posunutie v rovine.
Pomoc. Inšpirujte sa appletom pre určenie transformačných rovníc posunutia v rovine pomocou programu GeoGebra. Návrh
Tu.
\)
Obraz troch bodov
Nech je daná - tica bodov  v euklidovskom priestore taká, že
v euklidovskom priestore taká, že ") - tica vektorov
- tica vektorov  so zamerania je nezávislá. V tomto prípade sústava
so zamerania je nezávislá. V tomto prípade sústava  tvorí repér tohto priestoru. Takejto - tici bodov budeme hovoriť, že je lineárne nezávislá.
tvorí repér tohto priestoru. Takejto - tici bodov budeme hovoriť, že je lineárne nezávislá.
Vo vete "Jednoznačnosť afinného zobrazenia" sme dokázali, že afinné zobrazenie je jednoznačne určené obrazmi lineárne nezávislých bodov euklidovského priestoru .Dôkaz tohto tvrdenia nájdete aj v práci [Chalmoviansky, 2022].
V ďalšej časti sa zameriame na určenie transformačných rovníc afinného zobrazenia v euklidovskej rovine, v ktorom sú dané dve trojice odpovedajúcich nekolineárnych bodov. Začneme trojicami, ktoré vyhovujú rovnoľahlosti, čo nám uľahčí kontrolu správnosti určenia transformačných rovníc.
- tica bodov v euklidovskom priestore taká, že - tica vektorov so zamerania je nezávislá. V tomto prípade sústava tvorí repér tohto priestoru. Takejto - tici bodov budeme hovoriť, že je lineárne nezávislá.
Vo vete "Jednoznačnosť afinného zobrazenia" sme dokázali, že afinné zobrazenie
je jednoznačne určené obrazmi lineárne nezávislých bodov euklidovského priestoru .Dôkaz tohto tvrdenia nájdete aj v práci [Chalmoviansky, 2022].
V ďalšej časti sa zameriame na určenie transformačných rovníc afinného zobrazenia v euklidovskej rovine
, v ktorom sú dané dve trojice odpovedajúcich nekolineárnych bodov. Začneme trojicami, ktoré vyhovujú rovnoľahlosti, čo nám uľahčí kontrolu správnosti určenia transformačných rovníc.
Cvičenie.
Určte transformačné rovnice afinného zobrazenia , v ktorom
, v ktorom
 \rightarrow A'(4,2);\; \;B(\frac{3}{2},-\frac{3}{2}) \rightarrow B'(\frac{11}{4},-\frac{1}{2}),\; \;C(-3,0) \rightarrow C'(2,4)") .
.
Určte transformačné rovnice afinného zobrazenia
, v ktorom
.
Riešenie (riešenie pomocou programu GeoGebra
Tu).
Pre bod v rovine platí, že je lineárnou kombináciou bodov  ;B(\frac{3}{2},-\frac{3}{2});C(-3,0)") ,
preto platí
,
preto platí
+b(\frac{3}{2},-\frac{3}{2})+c(-3,0)") , pričom .
, pričom .
V kapitole "Afinné zobrazenie" sme ukázali, že transformačné rovnice afinného zobrazenia v euklidovskom priestore majú tvar
majú tvar
 ,
,
kde sú súradnice obrazov vektorov bázy
sú súradnice obrazov vektorov bázy  a súradnice obrazu začiatku repéra
a súradnice obrazu začiatku repéra  . Dosaďme súradnice
bodov
. Dosaďme súradnice
bodov  do týchto transformačných rovníc. Po úprave dostaneme dve rovnice o 6 neznámych . Konkrétne to budú rovnice
do týchto transformačných rovníc. Po úprave dostaneme dve rovnice o 6 neznámych . Konkrétne to budú rovnice

Postupne ak dosadíme súradnice ďalších bodov dostaneme ďalšie 4 rovnice.
dostaneme ďalšie 4 rovnice.



Spolu je to sústava 6 lineárnych rovníc, ktorá vzhľadom na zadanie (nekolineárne body) bude mať práve jedno riešenie. Vypíšte všetkých 6 rovníc a potom vyriešte túto sústavu.
Pre bod
v rovine platí, že je lineárnou kombináciou bodov ,
preto platí
, pričom .
V kapitole "Afinné zobrazenie" sme ukázali, že transformačné rovnice afinného zobrazenia v euklidovskom priestore
majú tvar
,
kde
sú súradnice obrazov vektorov bázy a súradnice obrazu začiatku repéra . Dosaďme súradnice
bodov do týchto transformačných rovníc. Po úprave dostaneme dve rovnice o 6 neznámych . Konkrétne to budú rovnice
Postupne ak dosadíme súradnice ďalších bodov
dostaneme ďalšie 4 rovnice.
Spolu je to sústava 6 lineárnych rovníc, ktorá vzhľadom na zadanie (nekolineárne body) bude mať práve jedno riešenie. Vypíšte všetkých 6 rovníc a potom vyriešte túto sústavu.
Poznámka.
Nájsť riešenie takejto sústavy je časovo dosť náročná práca, ktorá študentov nemotivuje a navyše ich odpúta od podstaty úlohy– nájsť transformačné rovnice.
Preto s výhodou môžeme použiť nástroje programu GeoGebra (alebo iných softvérov, napr. Matrix). Pomocou GeoGebra vzhľadu "Tabuľka" najskôr „vygenerujeme“ maticu sústavy 6 rovníc so 6 neznámymi s pravou stranou. Do jednotlivých polí v „Tabuľke“ vložíme súradnice bodov pomocou príkazov:, y(M)") , kde
je názov bodu, ktorého súadnice vkladáme.
, kde
je názov bodu, ktorého súadnice vkladáme.
Z tabuľky vidieť, že napr. do poľa „A2“ je vložený príkaz“") , ktorý predstavuje prvú súradnicu bodu .
Tabuľka má ďalšiu veľkú výhodu: Vstupné pole „A2“ je aktívne voči zmene polohy bodu . Ak sa poloha bodu zmení, tak sa automaticky zmení aj
príslušné polia tabuľky
, ktorý predstavuje prvú súradnicu bodu .
Tabuľka má ďalšiu veľkú výhodu: Vstupné pole „A2“ je aktívne voči zmene polohy bodu . Ak sa poloha bodu zmení, tak sa automaticky zmení aj
príslušné polia tabuľky “, \"=y(A)“") . Analogicky sa aktualizujú aj zvyšné polia tabuľky. Dynamické vstupy nám teda umožnia aktualizovať maticu
sústavy 6 rovníc aj s pravou stranou. Je to matica typu 6×7 s rozsahom je
. Analogicky sa aktualizujú aj zvyšné polia tabuľky. Dynamické vstupy nám teda umožnia aktualizovať maticu
sústavy 6 rovníc aj s pravou stranou. Je to matica typu 6×7 s rozsahom je ") .
.
Riešenie danej sústavy 6 rovníc so 6 neznámymi s pravou stranou môžeme nájsť pomocou maticového počtu, ktorý je tiež k dispozícii v GeoGebre.
 & 0 & \left(-1,5\right) & 0 & 1 & 0 \\
0 & \left(1,5\right) & 0 & \left(-1,5\right) & 0 & 1 \\
-3 & 0 & 0 & 0 & 1 & 0 \\
0 & -3 & 0 & 0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
a \\
b \\
c \\
d \\
p \\
q
\end{matrix}\right)=
\left(\begin{matrix}
4 \\
2 \\
2,75 \\
-0,5\\
2 \\
4
\end{matrix}\right)")
Výsledok.=
\left(\begin{matrix}
-0,25 \\
-1 \\
-1,25\\
0 \\
1,25\\
1
\end{matrix}\right)")
Transformačné rovnice skúmaného afinného zobrazenia sú prezentované na ďalšom obrázku v ľavej časti obrázka.
Matica zobrazenia Nájsť riešenie takejto sústavy je časovo dosť náročná práca, ktorá študentov nemotivuje a navyše ich odpúta od podstaty úlohy– nájsť transformačné rovnice.
Preto s výhodou môžeme použiť nástroje programu GeoGebra (alebo iných softvérov, napr. Matrix). Pomocou GeoGebra vzhľadu "Tabuľka" najskôr „vygenerujeme“ maticu sústavy 6 rovníc so 6 neznámymi s pravou stranou. Do jednotlivých polí v „Tabuľke“ vložíme súradnice bodov pomocou príkazov:
, kde
je názov bodu, ktorého súadnice vkladáme.
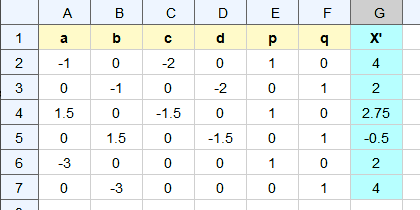
Z tabuľky vidieť, že napr. do poľa „A2“ je vložený príkaz
, ktorý predstavuje prvú súradnicu bodu .
Tabuľka má ďalšiu veľkú výhodu: Vstupné pole „A2“ je aktívne voči zmene polohy bodu . Ak sa poloha bodu zmení, tak sa automaticky zmení aj
príslušné polia tabuľky . Analogicky sa aktualizujú aj zvyšné polia tabuľky. Dynamické vstupy nám teda umožnia aktualizovať maticu
sústavy 6 rovníc aj s pravou stranou. Je to matica typu 6×7 s rozsahom je .
Riešenie danej sústavy 6 rovníc so 6 neznámymi s pravou stranou môžeme nájsť pomocou maticového počtu, ktorý je tiež k dispozícii v GeoGebre.
Výsledok.
Transformačné rovnice skúmaného afinného zobrazenia sú prezentované na ďalšom obrázku v ľavej časti obrázka.
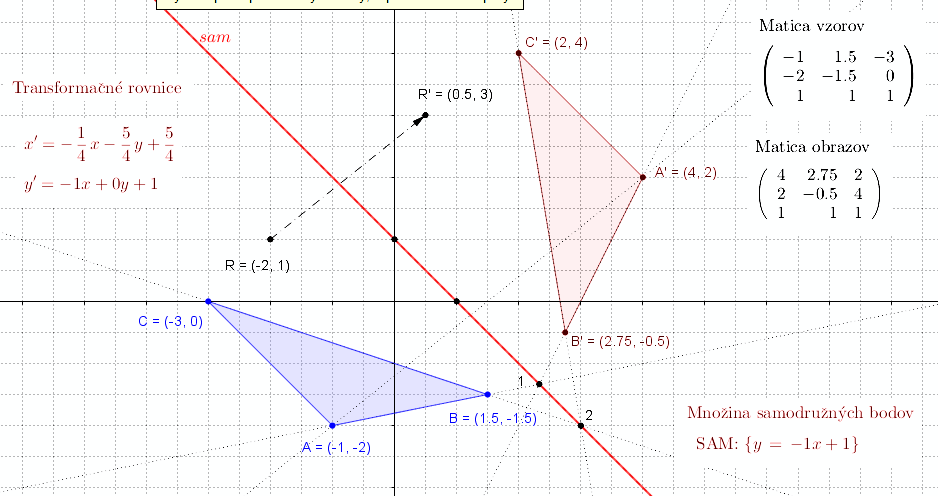 v tomto príklade má tvar
v tomto príklade má tvar ") ,
čo predstavuje osovú afinitu.
\)
,
čo predstavuje osovú afinitu.
\)
Obraz repéra
Z analytického vyjadrenia afinného zobrazenia  vyplýva, že takéto afinné zobrazenie je jednoznačne určené, ak poznáme obraz
vyplýva, že takéto afinné zobrazenie je jednoznačne určené, ak poznáme obraz  súradného repéru
súradného repéru  v tomto zobrazení. Analytické vyjadrenie daného zobrazenia je určené vzťahom (AV) v kapitole "Analytické vyjadrenie".
v tomto zobrazení. Analytické vyjadrenie daného zobrazenia je určené vzťahom (AV) v kapitole "Analytické vyjadrenie".
V tejto kapitole sa budeme zaoberať transformáciami euklidovskej roviny)") , ktorá má repér
, ktorá má repér
![\small \mathcal R =\left\langle O[0,0];\pmb {e_1}=(1,0),\pmb {e_2}=(0,1)\right\rangle](https://lms.umb.sk/filter/tex/pix.php/2831d609507dca97ba6f6635794431e6.png "\small \mathcal R =\left\langle O[0,0];\pmb {e_1}=(1,0),\pmb {e_2}=(0,1)\right\rangle") . Nech tento súradný repér v afinnom zobrazení sa zobrazí na repér
. Nech tento súradný repér v afinnom zobrazení sa zobrazí na repér
 . Vektory
. Vektory  sú lineárne nezávislé, preto aj ich obrazy
sú lineárne nezávislé, preto aj ich obrazy  sú zrejme lineárne nezávislé. Dokážte to!
sú zrejme lineárne nezávislé. Dokážte to!
vyplýva, že takéto afinné zobrazenie je jednoznačne určené, ak poznáme obraz súradného repéru v tomto zobrazení. Analytické vyjadrenie daného zobrazenia je určené vzťahom (AV) v kapitole "Analytické vyjadrenie".
V tejto kapitole sa budeme zaoberať transformáciami euklidovskej roviny
, ktorá má repér
. Nech tento súradný repér v afinnom zobrazení sa zobrazí na repér
. Vektory sú lineárne nezávislé, preto aj ich obrazy
sú zrejme lineárne nezávislé. Dokážte to!
Maticový zápis pre rovinné afinné zobrazenie  určené obrazom repéra
určené obrazom repéra  bude mať nasledovný tvar
bude mať nasledovný tvar
=\left(\begin{array}{ccc} a&c \\ b&d \end{array}\right)\times \left(\begin{array}{ccc}x \\ y \end{array}\right) + \left(\begin{array}{ccc}p \\ q \end{array}\right)") alebo
alebo
=\left(\begin{array}{ccc} a&c&p \\
b&d&q \\
0&0&1
\end{array}\right)
\times
\left(\begin{array}{ccc}x \\ y\\1 \end{array}\right)") ,
,
kde=f^*(\vec e_1), (c,d)=f^*(\vec e_2)") sú obrazy súradnicových vektorov v asociovanom zobrazení a
sú obrazy súradnicových vektorov v asociovanom zobrazení a ![\small [p,q]=f(O)](https://lms.umb.sk/filter/tex/pix.php/feb3f3a5de864768600e9bca42c058f3.png "\small [p,q]=f(O)") je obraz začiatku súradnej sústavy v afinnom zobrazení .
je obraz začiatku súradnej sústavy v afinnom zobrazení .
určené obrazom repéra bude mať nasledovný tvar
alebo
,
kde
sú obrazy súradnicových vektorov v asociovanom zobrazení a je obraz začiatku súradnej sústavy v afinnom zobrazení .
Matica ") sa nazýva transformačná matica afinného zobrazenia .
sa nazýva transformačná matica afinného zobrazenia .
Pri určovaní afinného zobrazenia, ktoré je určené obrazom , môžeme transformačné rovnice určiť priamo pomocou súradníc obrazu počiatku
, môžeme transformačné rovnice určiť priamo pomocou súradníc obrazu počiatku  a súradníc vektorov
a súradníc vektorov  . Súradnice obrazu ľubovoľného bodu roviny potom môžeme získať tak, že do transformačných rovníc dosadíme súradnice
bodu
. Súradnice obrazu ľubovoľného bodu roviny potom môžeme získať tak, že do transformačných rovníc dosadíme súradnice
bodu ![\small P[x_p, y_p]](https://lms.umb.sk/filter/tex/pix.php/f7bff613390be76a0f1fa7b64a9da5b3.png "\small P[x_p, y_p]") .
.
sa nazýva transformačná matica afinného zobrazenia .
Pri určovaní afinného zobrazenia, ktoré je určené obrazom
, môžeme transformačné rovnice určiť priamo pomocou súradníc obrazu počiatku a súradníc vektorov . Súradnice obrazu ľubovoľného bodu roviny potom môžeme získať tak, že do transformačných rovníc dosadíme súradnice
bodu .
Príklad - obraz bodu a kružnice euklidovskej roviny.
a kružnice euklidovskej roviny.
-
Určte transformačné rovnice afinného zobrazenia, ktoré postupne zobrazuje body súradného repéra
![\small O=[0, 0], E_1=[1, 0],E_2=[0, 1]](https://lms.umb.sk/filter/tex/pix.php/56ce3f57c162b4eb54eff0ef324ee891.png "\small O=[0, 0], E_1=[1, 0],E_2=[0, 1]") do bodov
do bodov
![\small O'=O[0, 0], E_1'=E_1[1, 0], E_2'=[\frac{1}{2},\frac{\sqrt{3}}{2}]](https://lms.umb.sk/filter/tex/pix.php/e4851d242d578efca580e2dc281bee93.png "\small O'=O[0, 0], E_1'=E_1[1, 0], E_2'=[\frac{1}{2},\frac{\sqrt{3}}{2}]") v tomto poradí.
v tomto poradí. - Určte obraz ľubovoľného bodu .
- Určte obraz kružnice
![\small k(S=[0, 0],r=3)](https://lms.umb.sk/filter/tex/pix.php/4af7ad0874964396095d6e079d2d64e7.png "\small k(S=[0, 0],r=3)") pomocou nástroja "Množina bodov".
pomocou nástroja "Množina bodov". - Pokúste sa toto afinné zobrazenie geometricky interpretovať. Príklad je prevzatý z práce (Chalmoviansky, Cvičenie 29).
Riešenie.
- Najskôr musíme určiť obraz súradného repéra
 . Keďže začiatok súradnej sústavy bod
. Keďže začiatok súradnej sústavy bod ![\small O=O'[0, 0]](https://lms.umb.sk/filter/tex/pix.php/3e365e95cef0de0e28fa7bc6aefcd085.png "\small O=O'[0, 0]") je samodružný, tak pre obrazy vektorov bude platiť
je samodružný, tak pre obrazy vektorov bude platiť , \vec e'_2=(\frac{1}{2},\frac{\sqrt{3}}{2})") .
Transformačné rovnice určíme dosadením súradníc obrazov vektorov
.
Transformačné rovnice určíme dosadením súradníc obrazov vektorov 

a súradníc bodu![\small O'[p=0, q=0]](https://lms.umb.sk/filter/tex/pix.php/3157dd0faaba26df499fd924dc638db3.png "\small O'[p=0, q=0]") do sústavy dvoch lineárnych rovníc o dvoch neznámych
do sústavy dvoch lineárnych rovníc o dvoch neznámych

Dostaneme transformačné rovnice
- Súradnice obrazu ľubovoľného bodu určíme dosadením jeho súradníc
 do transformačných rovníc. Pre súradnice
do transformačných rovníc. Pre súradnice
 dostaneme
dostaneme


Výsledok napríklad pre bod![\small P[-2, 3]](https://lms.umb.sk/filter/tex/pix.php/510391cd5be21da625dd57b7daa77115.png "\small P[-2, 3]") je
je ![\small P'\left [-\frac{1}{2}, \frac{3 \sqrt(3)}{2} \right ]](https://lms.umb.sk/filter/tex/pix.php/a5ce5c70f8eb8eb57367fa0a12072ec2.png "\small P'\left [-\frac{1}{2}, \frac{3 \sqrt(3)}{2} \right ]") .
. - Samostatná práca: V GeoGebra applete (upravte applet "Kompletné grafické riešenie ..." z príkladu Tri body) si zvoľte si ľubovoľnú kružnicu
") a na nej si zvoľte ľubovoľný "Bod na objekte"
a na nej si zvoľte ľubovoľný "Bod na objekte"  .
Potom vo vlastnostiach bodu v definícii zadajte P=L. Nakoniec aktivujte nástroj "Množina bodov" a kliknite postupne na bod
a potom na bod .
.
Potom vo vlastnostiach bodu v definícii zadajte P=L. Nakoniec aktivujte nástroj "Množina bodov" a kliknite postupne na bod
a potom na bod .
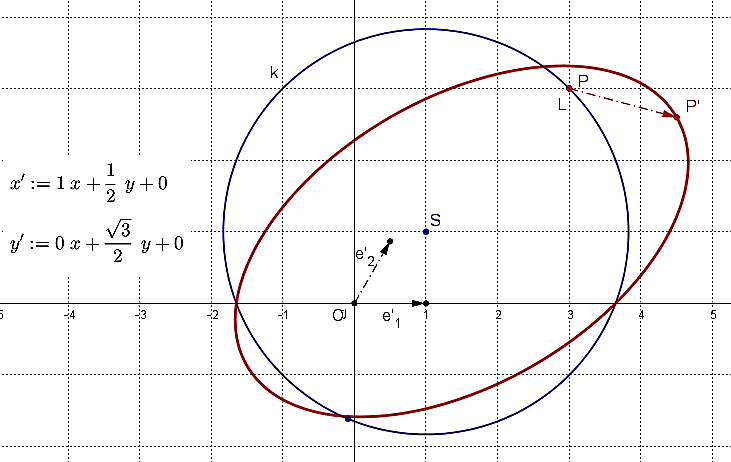
- Na základe obrazu kružnice ide o osovú afinitu, ktorej os je x-ová súradná os. Ukážte, že každý bod x-ovej súradnej osi je samodružný.
- Kompletná konštrukcia - "Dynamický repér" Tu.
Uvádzame aj určenie rovníc pomocou maticovej kalkulačky
=
\left(\begin{matrix}
1 & \frac{1}{2} & 0 \\
0 & \frac{\sqrt{3}}{2} & 0 \\
1 & 1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
1 & 0 & 0 \\
0 & 1 & 0 \\
-1 & -1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix} x \\ y \\ 1 \end{matrix}\right)=\left(\begin{matrix}
x+\frac{1}{2}y \\
\frac{\sqrt{3}}{2}y \\
1
\end{matrix}\right)") .
.
.\)
Samodružnosť
Definícia (Samodružný bod).
Bod v afinnom zobrazení  je samodružný práve vtedy, ak sa v zobrazení zobrazí sám na seba
je samodružný práve vtedy, ak sa v zobrazení zobrazí sám na seba
 = X") .
.
Bod
v afinnom zobrazení je samodružný práve vtedy, ak sa v zobrazení zobrazí sám na seba
.
Samodružné body afinnej transformácie pre  jednoducho nájdeme ako riešenie sústavy dvoch rovníc
jednoducho nájdeme ako riešenie sústavy dvoch rovníc

Vyriešiť tieto rovnice je jednoduché, ak poznáme koeficienty a,b,c,d,p,q.
jednoducho nájdeme ako riešenie sústavy dvoch rovníc
Vyriešiť tieto rovnice je jednoduché, ak poznáme koeficienty a,b,c,d,p,q.
Poznámky.
Z pohľadu syntetickej geometrie táto sústava dvoch rovníc predstavuje dve priamky v rovine. Vyriešiť sústavu znamená teda nájsť spoločné body dvoch priamok a to môže byť
Z pohľadu syntetickej geometrie táto sústava dvoch rovníc predstavuje dve priamky v rovine. Vyriešiť sústavu znamená teda nájsť spoločné body dvoch priamok a to môže byť
- prázdna množina – vtedy afinné zobrazenie nemá samodružný bod
- existuje priesečník priamok – afinné zobrazenie má jeden samodružný bod
- priamky sú totožné - afinné zobrazenie má priamku samodružných bodov.
Cvičenie.
Nájdite samodružné body afinného zobrazenia, v ktorom sa súradný repér zobrazí na repér![\small \mathcal R' = \left \langle O'[2,2]; \vec e'_1(0,-1), \vec e'_2(-1,0) \right\rangle](https://lms.umb.sk/filter/tex/pix.php/7d1bde7a41c515aa3b7aaf176b3fb025.png "\small \mathcal R' = \left \langle O'[2,2]; \vec e'_1(0,-1), \vec e'_2(-1,0) \right\rangle") .
.
Nájdite samodružné body afinného zobrazenia, v ktorom sa súradný repér zobrazí na repér
.
Transformačné rovnice budú mať tvar

Nasledujúci obrázok predstavuje grafickú interpretáciu tohto afinného zobrazenie v rovine. Bod,y(M))") je pohyblivý, ktorého obraz je bod
je pohyblivý, ktorého obraz je bod  .
Bod má v afinnom zobrazení súradnice
.
Bod má v afinnom zobrazení súradnice  + c y(M) + p, b x(M) + d y(M) + q)") , kde (\small a,b,c,d,p,q\) sú súradnice obrazu repéra.
Applet k tomuto cvičeniu si môžete otvoriť
Tu.
, kde (\small a,b,c,d,p,q\) sú súradnice obrazu repéra.
Applet k tomuto cvičeniu si môžete otvoriť
Tu.
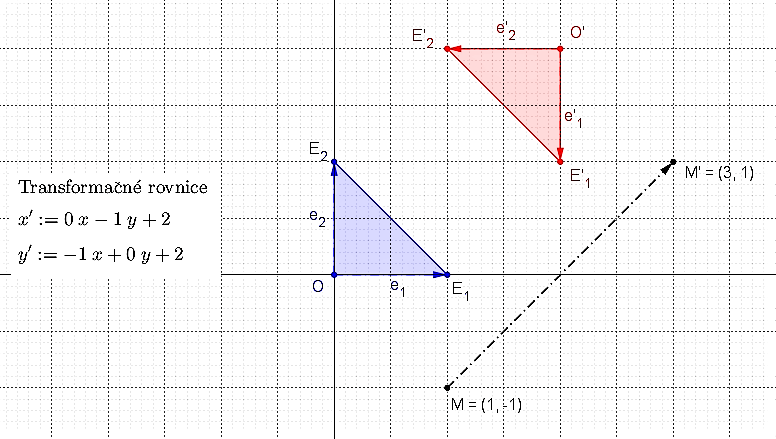
Samodružné body afinnej transformácie jednoducho nájdeme ako riešenie rovnice
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} 1 & 0 \\ 0 & 1 \\ \end{array} \right)+\left( \begin{array}{} 2 & 2\end{array} \right)") .
.
Po rozpísaní dostaneme sústava dvoch rovníc, ktorá bude mať tvar

Ľahko nahliadneme, že rovnice sú lineárne závislé (dokonca rovné). Preto množina bodov, ktoré sú riešením danej sústavy je priamka .
Presnejšie: každý bod priamky
.
Presnejšie: každý bod priamky

je samodružný. Zobrazenie, ktoré má priamku bodovo samodružnú, je buď osová súmernosť alebo osová afinita. V našom prípade je to osová súmernosť s osou súmernosti.
Nasledujúci obrázok predstavuje grafickú interpretáciu tohto afinného zobrazenie v rovine. Bod
je pohyblivý, ktorého obraz je bod .
Bod má v afinnom zobrazení súradnice , kde (\small a,b,c,d,p,q\) sú súradnice obrazu repéra.
Applet k tomuto cvičeniu si môžete otvoriť
Tu.
Samodružné body afinnej transformácie jednoducho nájdeme ako riešenie rovnice
.Po rozpísaní dostaneme sústava dvoch rovníc, ktorá bude mať tvar
Ľahko nahliadneme, že rovnice sú lineárne závislé (dokonca rovné). Preto množina bodov, ktoré sú riešením danej sústavy je priamka
.
Presnejšie: každý bod priamky
je samodružný. Zobrazenie, ktoré má priamku bodovo samodružnú, je buď osová súmernosť alebo osová afinita. V našom prípade je to osová súmernosť s osou súmernosti
.
Úlohy.
Určite samodružné body afinného zobrazenia určeného transformačnými rovnicami:
Určite samodružné body afinného zobrazenia určeného transformačnými rovnicami:


- Úlohy zo zbierky Monoszová 3.5.1 až 3.5.7.
Riešenie
- Po úprave dostaneme

Applet Tu. - Po úprave dostaneme
 .
. - Použite nástroje CAS "Riešenie sústavy rovníc".
Tvrdenie
Afinné zobrazenie v je jednoznačne určené obrazmi lineárne nezávislých bodov euklidovského priestoru
.
Afinné zobrazenie
v je jednoznačne určené obrazmi lineárne nezávislých bodov euklidovského priestoru
.
\)
Zhodnostné zobrazenia
Analytické vyjadrenia zhodnostných zobrazení
Geometrické resp. konštrukčné vlastnosti zhodnostných zobrazení nájdete
Tu.
Definícia
Zobrazenie v rovine budeme nazývať zhodnostné zobrazenie, ak pre každé dva body  a ich obrazy
a ich obrazy , f(Y )") platí
platí
f(Y)|") .
.
Inými slovami zhodné zobrazenia zachovávajú vzdialenosti bodov.
Zobrazenie
v rovine budeme nazývať zhodnostné zobrazenie, ak pre každé dva body
a ich obrazy platí
.
Inými slovami zhodné zobrazenia zachovávajú vzdialenosti bodov.
Tvrdenie (Afinnosť zhodnostného zobrazenia).
Každé zhodnostné zobrazenie je afinné.
je afinné.
Každé zhodnostné zobrazenie
je afinné.
Dôkaz
Treba dokázať, že zhodnostné zobrazenie spĺňa podmienku zachovania kolineárnosti a deliaceho pomeru.
Nech  sú kolineárne body
sú kolineárne body  , potom zrejme aj body (\small f(A), f(B),f(C) \) sú navzájom rôzne.
Bez ujmy na obecnosti môžeme predpokladať, že pre usporiadanie bodov platí
, potom zrejme aj body (\small f(A), f(B),f(C) \) sú navzájom rôzne.
Bez ujmy na obecnosti môžeme predpokladať, že pre usporiadanie bodov platí ") . Bod
. Bod  leží medzi bodmi
leží medzi bodmi  .
.
Ukážeme, že body, f(B),f(C)") sú kolineárne a zároveň platí
sú kolineárne a zároveň platí  = (f(A)f(B)f(C))") .
. Načrtnite si obrázok.
.
. Načrtnite si obrázok.
Treba dokázať, že zhodnostné zobrazenie
spĺňa podmienku zachovania kolineárnosti a deliaceho pomeru.
Nech sú kolineárne body , potom zrejme aj body (\small f(A), f(B),f(C) \) sú navzájom rôzne.
Bez ujmy na obecnosti môžeme predpokladať, že pre usporiadanie bodov platí . Bod leží medzi bodmi .
Ukážeme, že body
sú kolineárne a zároveň platí .
- Prvú časť tvrdenia dokážeme sporom. Nech body nie sú kolineárne, potom vytvárajú trojuholník a
na základe trojuholníkovej nerovnosti dostaneme spor.
- Teda body ležia na jednej priamke. Pre ich usporiadanie môžu nastať dva prípady, z ktorých iba prípad, keď bod
") leží medzi bodmi
leží medzi bodmi ,f(C)") vyhovuje podmienkam:
vyhovuje podmienkam:
f(C) \right| ,\left| BC \right| =\left| f(B)f(C) \right| ,\left| AB \right| =\left| f(A)f(B) \right|") .
.
. Načrtnite si obrázok.
Osová súmernosť je oproti ostatným zhodným zobrazeniam niečím výnimočná. Má jednu veľmi zaujímavú vlastnosť, skladaním osových súmerností sa dajú získať
všetky zhodné zobrazenia v rovine. Z toho dôvodu začneme analytickým vyjadrením osovej súmernosti.
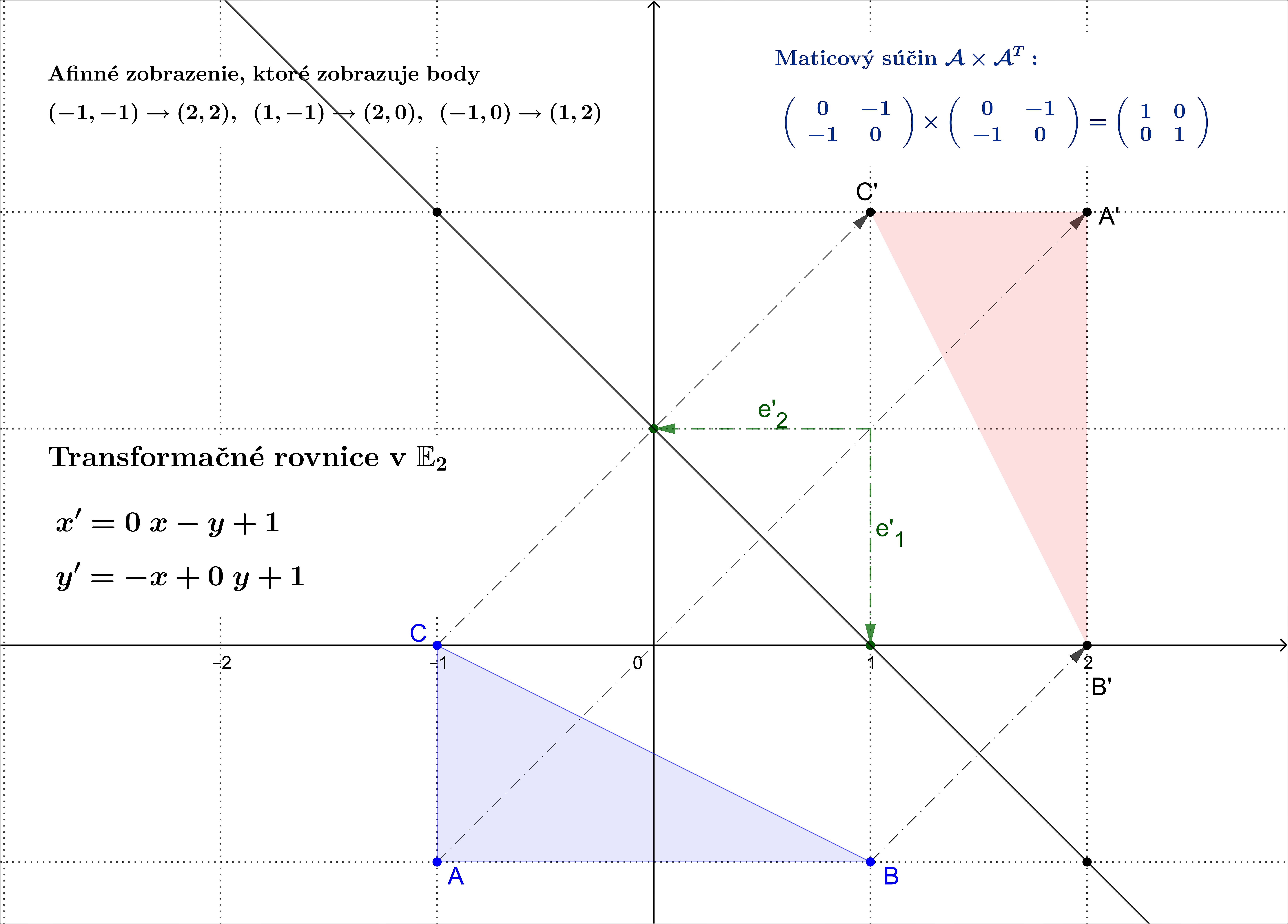
Geometrická interpretácia osovej súmernosti ako afinnej transformácie: Odvodenie rovníc Tu, Verzia "Repér" Tu
Geometrická interpretácia osovej súmernosti ako afinnej transformácie: Odvodenie rovníc Tu, Verzia "Repér" Tu
Nech je euklidovská rovina so súradnicovou sústavou
 . Zhodnostné zobrazenie
. Zhodnostné zobrazenie
 má analytické vyjadrenie
má analytické vyjadrenie
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} a_{11} & a_{21} \\ a_{12} & a_{22} \\ \end{array} \right)+\left( \begin{array}{} b_1 & b_2\end{array} \right)")
kde,(a_{i1},a_{i2})") sú obrazy počiatku súradnej sústavy a obrazy jednotkových vektorov repéra.
sú obrazy počiatku súradnej sústavy a obrazy jednotkových vektorov repéra.
je euklidovská rovina so súradnicovou sústavou
. Zhodnostné zobrazenie
má analytické vyjadrenie
kde
sú obrazy počiatku súradnej sústavy a obrazy jednotkových vektorov repéra.
Podmienka pre maticu
")

kde je transponovaná matica k matici
je transponovaná matica k matici  a matica
a matica  je jednotková.
je jednotková.
kde
je transponovaná matica k matici a matica je jednotková.
\)
Posunutie
Posunutie je afinné zobrazenie určené vektorom posunutia  , kde
, kde ![\small O'=[p,q], \vec u =(p,q)](https://lms.umb.sk/filter/tex/pix.php/935a5f780f2084c71e7899ad6977cd4f.png "\small O'=[p,q], \vec u =(p,q)") .
Posunutie je analyticky určené rovnicou
.
Posunutie je analyticky určené rovnicou

a prepísaním do maticového tvaru
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} 1 & 0 \\ 0 & 1 \\ \end{array} \right)+\left( \begin{array}{} p & q\end{array} \right),") (1)
(1)
čo predstavuje transformačné rovnice
 .
.
, kde .
Posunutie je analyticky určené rovnicou
a prepísaním do maticového tvaru
(1)
čo predstavuje transformačné rovnice
.
Tvrdenie
Posunutie v rovine je afinné zobrazenie a zároveň je zhodnostné. Dokážte to.
Posunutie v rovine je afinné zobrazenie a zároveň je zhodnostné. Dokážte to.
Príklad
V rovine je posunutie určené vektorom") . Určite jeho transformačné rovnice.
. Určite jeho transformačné rovnice.
V rovine je posunutie určené vektorom
. Určite jeho transformačné rovnice.
Riešenie
Poznáme obraz počiatku súradnej sústavy:![\small O' = [1,2]](https://lms.umb.sk/filter/tex/pix.php/10dcc2e27b46ae55829443bf31127cf3.png "\small O' = [1,2]") a dosadením do vzťahu (1) dostaneme rovnice
a dosadením do vzťahu (1) dostaneme rovnice
 .
.
Pomoc - otvorte si applet Tu.
Poznáme obraz počiatku súradnej sústavy:
a dosadením do vzťahu (1) dostaneme rovnice
.
Pomoc - otvorte si applet Tu.
Rozšírené matice.
Umožňujú vytvárať zložené zhodné zobrazenia. Pozrite si prezentáciu Tu.
Umožňujú vytvárať zložené zhodné zobrazenia. Pozrite si prezentáciu Tu.
\)
Osová súmernosť
Zhodnostné zobrazenie v rovine Osová súmernosť - ukážka
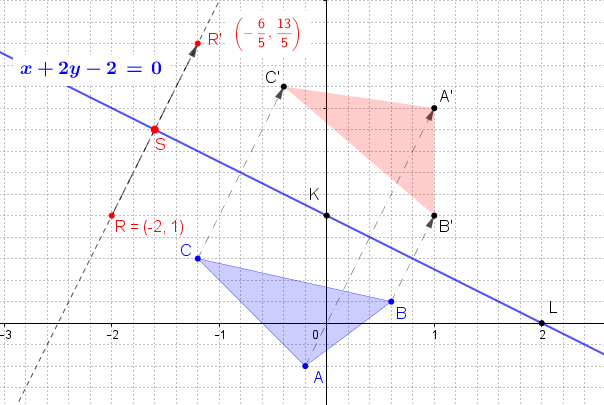
Osová súmernosť určená troma bodmi.
- Na určenie transformačných rovníc osovej súmernosti určenej osou súmernosti
 budeme potrebovať obrazy
troch rôznych bodov a ich obrazy v danej osovej súmernosti.
budeme potrebovať obrazy
troch rôznych bodov a ich obrazy v danej osovej súmernosti.
Najvýhodnejšie bude ak si zvolíme dva rôzne samodružné body a nejaký tretí bod tak, aby všetky tri boli nekolineárne. Takými bodmi pri takto danej osi súmernosti sú napríklad- dva body na osi súmernosti
 , pre ktoré platí
, pre ktoré platí ![\small A=[0,\frac{-c}{b}]](https://lms.umb.sk/filter/tex/pix.php/dd67a08dcc145362b583cb2c84e94ce1.png "\small A=[0,\frac{-c}{b}]") a
a ![\small B=[\frac{-c}{a},0]](https://lms.umb.sk/filter/tex/pix.php/b35dafcb91a2f8e7f3b1e89aeb667a55.png "\small B=[\frac{-c}{a},0]") ,
prípad ak jeden z koeficientov
,
prípad ak jeden z koeficientov  je rovný nule sa rieši zvlášť;
je rovný nule sa rieši zvlášť; - a tretí bod nech je počiatok súradnej sústavy
![\small O=[0,0]](https://lms.umb.sk/filter/tex/pix.php/b84d8e89cd0f49322ca9230458995576.png "\small O=[0,0]") . Súradnice jeho obrazu
. Súradnice jeho obrazu ![\small O'=[p,q]](https://lms.umb.sk/filter/tex/pix.php/7843bc3154f974357ba963a4d076a5bc.png "\small O'=[p,q]") určíme napríklad pomocou "Matrix calculator":
určíme napríklad pomocou "Matrix calculator":
 .
.
- dva body na osi súmernosti
- Potom dosadíme súradnice obrazov
![\small O'=[p,q],A'=[0,\frac{-c}{b}],B'=[\frac{-c}{a},0]](https://lms.umb.sk/filter/tex/pix.php/15877e5bc55d5ebc24734962c92c4b49.png "\small O'=[p,q],A'=[0,\frac{-c}{b}],B'=[\frac{-c}{a},0]") do vzťahov
do vzťahov

pričom musí platiť
.
Dostaneme sústavu troch rovníc a využitím Matrix calculator dostaneme riešenie
 x\;-\;\;\left( \frac{2ab}{a^2+b^2} \right) y-\frac{2ac}{a^2+b^2}\\\\
y'=\left(-\frac{2ab}{a^2+b^2} \right) x\;-\;\;\left( \frac{a^2-b^2}{a^2+b^2} \right)y-\frac{2bc}{a^2+b^2}.")
Cvičenie.
Určte analytické vyjadrenie osovej súmernosti určenej osou , ktorá je určená rovnicou
, ktorá je určená rovnicou  .
.
Určte analytické vyjadrenie osovej súmernosti určenej osou
, ktorá je určená rovnicou .

Osová súmernosť určená repérom.
Pri určovaní transformačných rovníc osovej súmernosti určenej osou súmernosti môžeme s výhodou použiť obraz súradného repéra

Postupne nájdeme:
môžeme s výhodou použiť obraz súradného repéra
Postupne nájdeme:
- Obraz počiatku súradnej sústavy
![\small O'=[p,q]](https://lms.umb.sk/filter/tex/pix.php/9b214e8052bd6e14c00d9869d21efbbe.png "\small O'=[p,q]") , ktorý určíme ako bod súmerný k bodu
, ktorý určíme ako bod súmerný k bodu ![\small O=[0,0]](https://lms.umb.sk/filter/tex/pix.php/8b8044e750d6bcc556aaf5ed8f4fce4a.png "\small O=[0,0]") . Ten určíme pomocou priesečníka
. Ten určíme pomocou priesečníka  priamky kolmej na priamku , ktorá prechádza bodom . Najskôr určíme
priamky kolmej na priamku , ktorá prechádza bodom . Najskôr určíme
- súradnice vektora
 .
. - súradnice bodu môžeme spočítať ako
 , pretože
vektor
, pretože
vektor  je normálový vektor priamky a určuje vzdialenosť bodu od priamky .
je normálový vektor priamky a určuje vzdialenosť bodu od priamky .
- súradnice vektora
- Na určenie transformačných rovníc potrebujeme ešte aspoň dva rôzne body a ich obrazy v danej osovej súmernosti. Najvýhodnejšie bude ak si zvolíme dva samodružné body.
Takými bodmi sú ľubovoľné dva body na osi súmernosti .
- Zvoľme si a , prípad ak jeden z koeficientov je rovný nule sa rieši zvlášť.
- Potom dosadíme súradnice obrazov do vzťahu
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} a & c \\ b & d \\ \end{array} \right)+\left( \begin{array}{} p & q\end{array} \right),") (1)
(1)
a dostaneme 4 rovnice o 4 neznámych


Cvičenie.
Určte analytické vyjadrenie osovej súmernosti určenej osou, ktorá je určená rovnicou .
Určte analytické vyjadrenie osovej súmernosti určenej osou
, ktorá je určená rovnicou .
Riešenie.
Po určení![\small O'=[\frac{4}{5},\frac{8}{5}],A'=[0,1],B'=[2,0]](https://lms.umb.sk/filter/tex/pix.php/47a5a636b0a629e5cbc960ea12a787c6.png "\small O'=[\frac{4}{5},\frac{8}{5}],A'=[0,1],B'=[2,0]") a dostaneme 4 rovnice o 4 neznámych
a dostaneme 4 rovnice o 4 neznámych


Riešenie sústavy v GeoGebre Tu . Modelovanie cez applet "Repér" Tu.
Po určení
a dostaneme 4 rovnice o 4 neznámych
Riešenie sústavy v GeoGebre Tu . Modelovanie cez applet "Repér" Tu.
\)
Otáčanie
Otáčanie je afinné zobrazenie určené stredom otáčania a uhlom otáčania. Analytické vyjadrenie má maticový tvar
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} \cos \alpha & \sin α \\ - \sin α & \cos α \\ \end{array} \right)+\left( \begin{array}{} p & q\end{array} \right),") (2)
(2)
kde je uhol otočenia a
je uhol otočenia a  je celé číslo. Napríklad otočenie o orientovaný uhol
je celé číslo. Napríklad otočenie o orientovaný uhol  okolo
počiatku má analytický predpis
okolo
počiatku má analytický predpis
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} 0 & 1 \\ -1 & 0 \\ \end{array} \right)+\left( \begin{array}{} 0 & 0\end{array} \right),")
(2)
kde
je uhol otočenia a je celé číslo. Napríklad otočenie o orientovaný uhol okolo
počiatku má analytický predpis
Tvrdenie
Otočenie v rovine je afinné zobrazenie a zároveň je zhodnostné. Dokážte to.
Otočenie v rovine je afinné zobrazenie a zároveň je zhodnostné. Dokážte to.
Príklad
V rovine je otočenie určené stredom![\small S = [−1; 1]](https://lms.umb.sk/filter/tex/pix.php/29133975b65446dd0b21e48795ced112.png "\small S = [−1; 1]") a o orientovaným uhlom
a o orientovaným uhlom  . Určite jeho transformačné rovnice a obraz kružnice
. Určite jeho transformačné rovnice a obraz kružnice
^2 + (y − 2)^2 = 9") .
.
V rovine je otočenie určené stredom
a o orientovaným uhlom . Určite jeho transformačné rovnice a obraz kružnice
.
Riešenie
Musíme určiť obraz počiatku súradnej sústavy. Súradnice bodu![\small O' = [p,q]](https://lms.umb.sk/filter/tex/pix.php/6e3ae7aa8eed85755323e42a70d98402.png "\small O' = [p,q]") dosadíme do vzťahu (2 dostaneme rovnice
dosadíme do vzťahu (2 dostaneme rovnice

pričom využijeme skutočnosť poznáme vzor a obraz stredu, ktorý je samodružný.
Riešením je bod![\small O' = [\frac{-1-\sqrt{3}}{2}; \frac{1-\sqrt{3}}{2}]](https://lms.umb.sk/filter/tex/pix.php/9ab3384edd44c065d24163885cb44633.png "\small O' = [\frac{-1-\sqrt{3}}{2}; \frac{1-\sqrt{3}}{2}]") .
.
Obraz kružnice určíme tak, že vypočítame súradnice obrazu stredu kružnice dosadením do transformačných rovníc. Polomer kružnice sa v zhodnom zobrazení nemení a bude rovný  . Zostrojte obraz kružnice v GeoGebre pomocou nástroja "Množina bodov" v applete Tu.
. Zostrojte obraz kružnice v GeoGebre pomocou nástroja "Množina bodov" v applete Tu.
Musíme určiť obraz počiatku súradnej sústavy. Súradnice bodu
dosadíme do vzťahu (2 dostaneme rovnice
pričom využijeme skutočnosť poznáme vzor a obraz stredu
, ktorý je samodružný.
Riešením je bod
.
Obraz kružnice určíme tak, že vypočítame súradnice obrazu stredu kružnice dosadením
do transformačných rovníc. Polomer kružnice sa v zhodnom zobrazení nemení a bude rovný . Zostrojte obraz kružnice v GeoGebre pomocou nástroja "Množina bodov" v applete Tu.\)
Vzor a obraz
Nech je dané afinné zobrazenie , v ktorom sa súradný repér zobrazí na repér  .
V tejto kapitole sa budeme zaoberať
.
V tejto kapitole sa budeme zaoberať
, v ktorom sa súradný repér zobrazí na repér .
V tejto kapitole sa budeme zaoberať
- obrazom bodu v afinnom zobrazení
- obrazom priamky v afinnom zobrazení
- hľadaním vzoru k obrazu bodu
Poznámky.
- Obraz ľubovoľného bodu
") v afinnom zobrazení určíme jednoducho tak, že súradnice tohto bodu dosadíme do transformačných rovníc.
Dostaneme rovnosti
v afinnom zobrazení určíme jednoducho tak, že súradnice tohto bodu dosadíme do transformačných rovníc.
Dostaneme rovnosti  , pričom čísla
, pričom čísla  predstavujú súradnice bodu
predstavujú súradnice bodu  .
. - Určiť obraz priamky
 v afinnom zobrazení znamená určiť rovnicu priamky
v afinnom zobrazení znamená určiť rovnicu priamky  . To môžeme urobiť dvoma spôsobmi.
. To môžeme urobiť dvoma spôsobmi.
- Ak priamka je určená dvomi rôznymi bodmi , tak súradnice bodov dosadíme do transformačných rovníc
afinného zobrazenia. Výpočtom popísanom v predchádzajúcom odseku určíme súradnice bodov , ktorými bude určená priamka
 .
Potom určíme napríklad parametrické rovnice priamky .
.
Potom určíme napríklad parametrické rovnice priamky . - Ak priamka je určená rovnicou (napr. vo všeobecnom tvare
 ), tak do transformačných rovníc
), tak do transformačných rovníc
 dosadíme za premenné
dosadíme za premenné  súradnice všeobecného bodu priamky. Tento bod určíme pomocou parametra v tvare
súradnice všeobecného bodu priamky. Tento bod určíme pomocou parametra v tvare ![\small P[t,- \frac{at+c}{b}]](https://lms.umb.sk/filter/tex/pix.php/29afefab61a72fec5c2f84dc7dc259dc.png "\small P[t,- \frac{at+c}{b}]") .
(V prípade. že
.
(V prípade. že  zvolíme parameter
zvolíme parameter  ). Po dosadení dostaneme parametrické
rovnice obrazu priamky
). Po dosadení dostaneme parametrické
rovnice obrazu priamky
 +p;\; y' = bt + d(- \frac{a_pt+c_p}{b_p}) + q}") .
.
- Ak priamka
- Nájsť vzor k danému obrazu
") v afinnom zobrazení určíme tak, že súradnice obrazu bodu
dosadíme do transformačných rovníc za premenné
v afinnom zobrazení určíme tak, že súradnice obrazu bodu
dosadíme do transformačných rovníc za premenné  . Dostaneme sústavu dvoch rovních o neznámych . Riešenie tejto súsatavy predstavuje
súradnice hľadaného vzoru.
. Dostaneme sústavu dvoch rovních o neznámych . Riešenie tejto súsatavy predstavuje
súradnice hľadaného vzoru.
Príklad.
Dané je afinné zobrazenie obrazom repéra![\small \mathcal R' = \left \langle O'=[ \frac{-1-\sqrt{3}}{2} , \frac{-1+\sqrt{3}}{2}]; \vec e'_1=( \frac{1}{2},-\frac{\sqrt{3}}{2} ), \vec e'_2=(\frac{\sqrt{3}}{2},\frac{1}{2}) \right\rangle](https://lms.umb.sk/filter/tex/pix.php/e2cdc039ed14408daf8c2b2514abac14.png "\small \mathcal R' = \left \langle O'=[ \frac{-1-\sqrt{3}}{2} , \frac{-1+\sqrt{3}}{2}]; \vec e'_1=( \frac{1}{2},-\frac{\sqrt{3}}{2} ), \vec e'_2=(\frac{\sqrt{3}}{2},\frac{1}{2}) \right\rangle") . Určite obraz bodov
. Určite obraz bodov ![\small [-1,1], [-1,-1]](https://lms.umb.sk/filter/tex/pix.php/53e28ab8a315deb4586b9442a406b896.png "\small [-1,1], [-1,-1]") .
.
Dané je afinné zobrazenie obrazom repéra
. Určite obraz bodov .
![\small [-1,1]](https://lms.umb.sk/filter/tex/pix.php/c0b0c9cea429ed1994542f478aba8817.png "\small [-1,1]")
Príklad.
Dané je afinné zobrazenie obrazom repéra![\small \mathcal R' = \left \langle O'=[ -2 , 2]; \vec e'_1=(2,1), \vec e'_2=(-1,1) \right\rangle](https://lms.umb.sk/filter/tex/pix.php/31f70cf40d8c1a8eebff87571542c457.png "\small \mathcal R' = \left \langle O'=[ -2 , 2]; \vec e'_1=(2,1), \vec e'_2=(-1,1) \right\rangle") . Určite obraz priamky
. Určite obraz priamky  a priamky
a priamky  .
.
Dané je afinné zobrazenie obrazom repéra
. Určite obraz priamky a priamky .
Riešenie
Analytické riešenie: Transformačné rovnice sú

Analytické riešenie: Transformačné rovnice sú
- Pre priamku má jej ľubovoľný bod súradnice
![\small P[t,- \frac{2t+1}{3}]](https://lms.umb.sk/filter/tex/pix.php/925952d4a088ed38baaffc731c9eb649.png "\small P[t,- \frac{2t+1}{3}]") Po dosadení do transformačných rovníc
dostaneme sústavu parametrických rovníc
Po dosadení do transformačných rovníc
dostaneme sústavu parametrických rovníc
 -2\\ y' = t + (- \frac{2t+1}{3}) + 2}.")
Výsledok: po úprave na všeobecný tvar dostaneme rovnicu obrazu priamky:
Na syntetické riešenie použite applet Tu. - Keďže každý bod priamky \small x=1 \) má prvú súradnicu rovnú 1, tak stačí hodnotu \small x=1 \) dosadiť do transformačných rovníc a dostaneme rovnice
 Po dosadení do druhej rovnice
Po dosadení do druhej rovnice  dostaneme rovnicu obrazu priamky
dostaneme rovnicu obrazu priamky  .
.
Príklad.
Dané je afinné zobrazenie transformačnými rovnicami
 .
.
Ktoré body sa zobrazia do bodov [9, 8] a [−6, 1]?
Dané je afinné zobrazenie transformačnými rovnicami
.
Ktoré body sa zobrazia do bodov [9, 8] a [−6, 1]?
Riešenie
Súradnice bodu [9, 8] dosadíme do transformačných rovníc za premenné. Riešením je dvojica  . Otvorte si applet na riešenie rovníc Tu.
. Otvorte si applet na riešenie rovníc Tu.
Súradnice bodu [9, 8] dosadíme do transformačných rovníc za premenné
. Riešením je dvojica . Otvorte si applet na riešenie rovníc Tu.\)
Cvičenie
Vektory a počítanie s nimi
- Vyriešte sústavu rovníc s parametrom
 v obore a tiež v obore
v obore a tiež v obore 
 .
.
Pozrite si geometrickú interpretáciu Tu. - Vyriešte sústavu rovníc v obore

\times
\left(\begin{matrix}
a \\
b \\
c \\
d \\
e \\
f
\end{matrix}\right)=
\left(\begin{matrix}
\frac{-1}{2} \\
\frac{-3}{2} \\
\frac{5}{2} \\
\frac{-1}{2} \\
1 \\
\frac{-3}{2}
\end{matrix}\right)") .
.
Pozrite si geometrickú interpretáciu Tu. - Zistite, či množina všetkých usporiadaných dvojíc resp. trojíc spolu s dvoma binárnymi operáciami
") je vektorovým priestorom nad poľom reálnych
čísel , ak
je vektorovým priestorom nad poľom reálnych
čísel , ak
;\; r \in \mathbb R }\rbrace") ,
,;\; r \in \mathbb R }\rbrace") ,
,;\; r \in \mathbb R, m \in \mathbb N }\rbrace") ,
,;\; x,y \in \mathbb R }\rbrace") , ,
kde sčítanie vektorov je definované ako súčet po zložkách usporiadaných dvojíc a násobenie skalárom je násobenie jednotlivých zložiek skalárom.
, ,
kde sčítanie vektorov je definované ako súčet po zložkách usporiadaných dvojíc a násobenie skalárom je násobenie jednotlivých zložiek skalárom.
- Sú dané body
![\small A=[-1,2], \;B=[5,1] ,\;C=[1,3]](https://lms.umb.sk/filter/tex/pix.php/414c0526ae587c59bf7ca2b03f363dfc.png "\small A=[-1,2], \;B=[5,1] ,\;C=[1,3]") . Nájdite vektory
. Nájdite vektory

a zistite ich dĺžky. Zadanie Tu. - [Mon 1.1.3.] Sú dané body . Určte polohu bodu
 tak, aby
tak, aby
- vektory
 boli umiestnením toho istého vektora.
boli umiestnením toho istého vektora. - vektory
 boli umiestnením toho istého vektora.
boli umiestnením toho istého vektora.
- vektory
- V rovine je daný pravidelný 6-uholník
 .
.
- K vektorom
 nájdite ďalšie orientované úsečky, ktoré reprezentujú dané vektory.
nájdite ďalšie orientované úsečky, ktoré reprezentujú dané vektory.
Otvorte si model šesťuholníka Tu. - Určte koľko viazaných (voľných) vektorov je určených vrcholmi pravidelný 6-uholník
 .
.
- K vektorom
- [Monoszová 1.1.11.] až [Monoszová 1.1.17.] Zbierka úloh z analytickej geometrie. Prvá časť Tu.
- Daný je pravidelný šesťuholník . Vyjadrite vektory

ako lineárne kombinácie vektorov .
. - V rovine je daný šesťuholník, ktorého vrcholy sú určené vzťahmi:
 .
.
Dokážte, že tento šesťuholník je súmerný podľa stredu .
Zadanie Tu.
Riešenie Tu.
.
Zadanie Tu.
Riešenie Tu. - Nech
 sú nekolineárne vektory. Určte číslo tak, aby vektory
sú nekolineárne vektory. Určte číslo tak, aby vektory
 boli kolineárne.
boli kolineárne. - Ukážte, že vektor
") je lineárnou kombináciou vektorov
je lineárnou kombináciou vektorov ,(2,1)") ale nie je LK vektorov
ale nie je LK vektorov ,(2,-4)") .
. - Vyjadrite vektor
") ako LK vektorov
ako LK vektorov ,(1,0,-1),(1,1,-1)") .
. - Ukážte, že vektory
,(0,1,0),(1,-1,1)") sú lineárne (ne)závislé.
sú lineárne (ne)závislé. - Vyjadríte vektor
") ako lineárnu kombináciu vektorov
ako lineárnu kombináciu vektorov ;(-2,1,0);(0,-3,1).")
- Nech vektory
 sú lineárne nezávislé. Zistite, či vektory
sú lineárne nezávislé. Zistite, či vektory
 sú závislé alebo nezávislé.
sú závislé alebo nezávislé.
- Množina
,(2,3)\right\rangle") je báza vektorového priestoru
je báza vektorového priestoru  . Určte
súradnice vektora
. Určte
súradnice vektora  vzhľadom k tejto báze, ak poznáte jeho súradnice
vzhľadom k tejto báze, ak poznáte jeho súradnice ") vzhľadom
ku kanonickej báze
vzhľadom
ku kanonickej báze , \vec{e_2}=(0,1)\right\rangle") . [Hašek 4.2.]
. [Hašek 4.2.] - Daný je vektorový priestor
![\small W=[(1,0,2),(2,4,1),(1,2,3)]⊂\mathbb{\pmb Z^3_5}](https://lms.umb.sk/filter/tex/pix.php/bf39545fa9089af780723cfab823fb3c.png "\small W=[(1,0,2),(2,4,1),(1,2,3)]⊂\mathbb{\pmb Z^3_5}") .
.
- Zistite, či vektory
 so súradnicami v kanonickej báze
so súradnicami v kanonickej báze ,\vec{v}=(1,2,1)") patria do obalu
patria do obalu ![\small [(1,0,2),(2,4,1),(1,2,3)]](https://lms.umb.sk/filter/tex/pix.php/4d1541748ff79167ba18023859b5bd6a.png "\small [(1,0,2),(2,4,1),(1,2,3)]") v obore
v obore  .
. - Nájdite nejakú bázu
 priestoru a určite jeho dimenziu. Určte súradnice vektora
priestoru a určite jeho dimenziu. Určte súradnice vektora  ,
ak
,
ak ") . Priestor obsahuje trojice prvkov telesa zvyškových tried modulo 5.
. Priestor obsahuje trojice prvkov telesa zvyškových tried modulo 5.
- Zistite, či vektory
- Nech
,\;\vec b(-2, -1, 3),\;\vec c (0, 2, 1))") je báza priestoru .
Nájdite vektor vo , ktorého súradnice vzhľadom k báze sú
je báza priestoru .
Nájdite vektor vo , ktorého súradnice vzhľadom k báze sú ") .
. - [Hašek 4.6.1] až [Hašek 4.6.8] Linearni algebra a geometrie. Dostupné Tu.
- Vypočítajte veľkosti uhlov a dĺžky strán v trojuholníku
 , ak .
, ak .![\small A = [1,-2],\; B = [-3,3],\; C = [1,3]](https://lms.umb.sk/filter/tex/pix.php/3bef5eb33c3054007f7c722fa39fe506.png "\small A = [1,-2],\; B = [-3,3],\; C = [1,3]") . Riešenie
...
. Riešenie
... - Vypočítate uhol vektorov a
 , ak
, ak  ; \vec{v} = (2,4).")
- Nech
![\small A = [1, 3], B = [-1, 5], \vec u=(2,-5), \vec v= (−3, 1)](https://lms.umb.sk/filter/tex/pix.php/017902b88f3a72c0913426327244e220.png "\small A = [1, 3], B = [-1, 5], \vec u=(2,-5), \vec v= (−3, 1)") . Rozhodnite,
či napísaný objekt je bod alebo vektor a určte jeho súradnice.
. Rozhodnite,
či napísaný objekt je bod alebo vektor a určte jeho súradnice.
a)-\vec v")
b)-(A+\vec u)") [
[
c)
- [Monoszová 2.1.1.] až [Monoszová 2.1.23.] Zbierka úloh z analytickej geometrie. Druhá časť Tu.
- [Monoszová 2.2.1.] až [Monoszová 2.3.7.] Zbierka úloh z analytickej geometrie. Druhá časť Tu.
- [Monoszová 1.2.1.a] Riešenie alg. Tu; geom. Tu.
- [Monoszová 1.2.1.b] Riešenie Tu.
- [Monoszová 1.2.2.a] Riešenie Tu.
- [Monoszová 1.2.4 ] Riešenie Tu.
- [Monoszová 1.2.5.b] Riešenie Tu.
- [Monoszová 1.2.5.c] Riešenie alg. Tu; geom. Tu.
- Riešte úlohy [Monoszová 1.3.1.] až [Monoszová 1.3.5.].
- Vypočítajte súradnice bodu
 ∈ A^4") v afinnej súradnicovej sústave
v afinnej súradnicovej sústave
 ,
ak
,
ak ; \vec u = e_3 - \sqrt2 e_4;\vec v = -3e_1 + e_2 - e_3- 2e_ 4") .
. - V rovine danej bodmi
![\small A = [2, 1, 3], B = [2, 4, 0], C = [−3, 0, 4]](https://lms.umb.sk/filter/tex/pix.php/9677c54bd1d6db96f81dc0bb8cea97d5.png "\small A = [2, 1, 3], B = [2, 4, 0], C = [−3, 0, 4]") zvoľte afinnú súradnicovú sústavu
zvoľte afinnú súradnicovú sústavu
 . Zistite, aké súradnice má bod M v
. Zistite, aké súradnice má bod M v  , ak jeho
súradnice v sú
, ak jeho
súradnice v sú ![\small [5, 3])](https://lms.umb.sk/filter/tex/pix.php/0e8d92d16f33e2ae254b91b3e18618ac.png "\small [5, 3])") .
. - V rovine je daný trojuholník
 a body
a body  v tomto poradí ako stredy strán
v tomto poradí ako stredy strán  . Nájdite súradnice vrcholov trojuholníka
v afinnej sústave súradníc
. Nájdite súradnice vrcholov trojuholníka
v afinnej sústave súradníc  .
. - V rovine je daný pravidelný šesťuholník . Nájdite súradnice vrcholov tohto 6-uholníka v afinnej súradnicovej
sústave
 .
.
- Riešte úlohy [Monoszová 1.4.1.] až [Monoszová 1.4.18.].
- Zistite, či body
![\small M = [9,-2,5], N = [4, 1, 6]](https://lms.umb.sk/filter/tex/pix.php/974bd421bfa210dda41cb67d18699651.png "\small M = [9,-2,5], N = [4, 1, 6]") incidujú s podpriestorom
incidujú s podpriestorom  pre
pre ![\small A = [1, 3, 2], \vec u = (2, -1, 1), \vec v = (1, -1, 0)](https://lms.umb.sk/filter/tex/pix.php/7859ecad3fa4ae689582f603a2d07df6.png "\small A = [1, 3, 2], \vec u = (2, -1, 1), \vec v = (1, -1, 0)") .
.
Návod: Bod leží v podpriestore práve vtedy, keď jeho súradnice vyhovujú parametrickému vyjadreniu, t. j.:
 . Napíšte najskôr parametrické rovnice podpriestoru a dosaďte súradnice bodu . [Vranková, 3L1].
. Napíšte najskôr parametrické rovnice podpriestoru a dosaďte súradnice bodu . [Vranková, 3L1]. - Dokážte, že pre každé
 množina bodov
množina bodov ![\small {[1, 0, 1], [3, 3, 5], [4, 1, 6], [1 + 2t + 3u, 3t + u, 1 + 4t + 5u]}](https://lms.umb.sk/filter/tex/pix.php/47428d8eb79f10991d01b3c4d0d55664.png "\small {[1, 0, 1], [3, 3, 5], [4, 1, 6], [1 + 2t + 3u, 3t + u, 1 + 4t + 5u]}") priestoru
priestoru  je afinne závislá.
Akú dimenziu má jej afinný obal?
je afinne závislá.
Akú dimenziu má jej afinný obal? - Určte aspoň jedno parametrické vyjadrenie roviny, ktorá prechádza bodom
![\small N = [-2, 3, 0]](https://lms.umb.sk/filter/tex/pix.php/025567a1d3ab183d7657bf4c2715170b.png "\small N = [-2, 3, 0]") a obsahuje priamku
a obsahuje priamku
 .
. - Riešte úlohy z práce (Tisoň, 2011) k téme: Lineárne podpriestory, parametrické a všeobecné vyjadrenia.
- Vyšetrite vzájomnú polohu danej priamky a roviny
 v
v  , ak:
, ak:  ,
,  . [Vranková, 4L1].
. [Vranková, 4L1]. - Zistite vzájomnú polohu priamky a roviny v
 , ak
, ak  ,
,  .
. - Zistite vzájomnú polohu priamok


- Určte afinné zobrazenie
 zobrazujúce
repér
zobrazujúce
repér  :
:
![\small O=[0, 0],\overrightarrow{e_1}= [1, 0], \overrightarrow{e_2}=[0, 1]](https://lms.umb.sk/filter/tex/pix.php/3bc082c1ca429d3d532b6d2ac1885e88.png "\small O=[0, 0],\overrightarrow{e_1}= [1, 0], \overrightarrow{e_2}=[0, 1]") do
do ![\small O'=[1, 1], \overrightarrow{e'_1}=[0, 1], \overrightarrow{e'_2}=[ 1 , 0]](https://lms.umb.sk/filter/tex/pix.php/a901128b615bb55454fdd7633d9cce87.png "\small O'=[1, 1], \overrightarrow{e'_1}=[0, 1], \overrightarrow{e'_2}=[ 1 , 0]") .
. -
do
![\small O'=[0, 0], \overrightarrow{e'_1}=[-1, 0], \overrightarrow{e'_2}=[ 0 , -1](https://lms.umb.sk/filter/tex/pix.php/5a58875d8d23211cfcb29a9f67520846.png "\small O'=[0, 0], \overrightarrow{e'_1}=[-1, 0], \overrightarrow{e'_2}=[ 0 , -1") .
.
- Afinné zobrazenie je dané transformačnými rovnicami
 . Určte
. Určte
- do akých bodov sa zobrazia body [0, 0], [5, 2], [−1, 4]
- ako sa zobrazia priamky

- grafickú interpretáciu v GeoGebre a zistite, čo je obrazom súradných osí v rovine, použite model "Repér" Tu
- Dané je afinné zobrazenie
 . Určite
. Určite
- obrazy bodov [0, 3], [1,4], [−1, -1]
- ktoré body sa zobrazia do bodov [-11, 0], [-7, 2] a [1, 6]
- ako sa zobrazia priamky

- Určte afinné zobrazenie, pre ktoré sú body priamky
 samodružné a bod [0, 0] sa zobrazí do [−1, −2].
samodružné a bod [0, 0] sa zobrazí do [−1, −2]. - Dané je afinné zobrazenie
 . Na priamke
. Na priamke  nájdite bod ,
ktorého obraz leží na tej istej priamke. Pomoc: najskôr určte obraz
nájdite bod ,
ktorého obraz leží na tej istej priamke. Pomoc: najskôr určte obraz  a potom priesečník (\small P= p\cap p' \). Priamku
a potom priesečník (\small P= p\cap p' \). Priamku  určte aj konštrukčne ako GMB.
určte aj konštrukčne ako GMB.
Riešené príklady
- Nájdite maticu afinnej transformácie , pričom platí
![\small O=[0, 0] \rightarrow O'=[1, 1]](https://lms.umb.sk/filter/tex/pix.php/0765f044b47d3ef64bf5d8ac93a2a27b.png "\small O=[0, 0] \rightarrow O'=[1, 1]")
![\small \overrightarrow{e_1} =[1, 0] \rightarrow \overrightarrow{e'_1} =(0, -1)](https://lms.umb.sk/filter/tex/pix.php/b99eb702a27fe10d9abc98f574ba3cda.png "\small \overrightarrow{e_1} =[1, 0] \rightarrow \overrightarrow{e'_1} =(0, -1)")
![\small \overrightarrow{e_2}=[0, 1] \rightarrow \overrightarrow{e'_2}=(-1, 0)](https://lms.umb.sk/filter/tex/pix.php/9fb07fc8c4a703075755f8eaf43dce94.png "\small \overrightarrow{e_2}=[0, 1] \rightarrow \overrightarrow{e'_2}=(-1, 0)") .
.
Riešenie.
Keďže máme obraz repéra, tak môžeme použiť geometrický model "Obraz repéru" Tu, v ktorom nastavíme odpovedajúce hodnoty pre obraz repéra.
Repér pre dané afinné zobrazenie je![\small O'=[1, 1], \overrightarrow{e'_1}=(0, -1 , \overrightarrow{e'_2}=(-1, 0) \rbrace](https://lms.umb.sk/filter/tex/pix.php/04f483745713111a02c837bbd052ec8a.png "\small O'=[1, 1], \overrightarrow{e'_1}=(0, -1 , \overrightarrow{e'_2}=(-1, 0) \rbrace") .
Transformačné rovnice budú mať analytické vyjadrenie
.
Transformačné rovnice budú mať analytické vyjadrenie

Skúmajme, či táto transformácia má samodružné body. Ak bod![\small M=[x, y]](https://lms.umb.sk/filter/tex/pix.php/afca5e5a17438cf3e0eb295dfb5c122d.png "\small M=[x, y]") je samodružný, tak musí pre jeho obraz
je samodružný, tak musí pre jeho obraz ![\small f(M)=M'[x', y']](https://lms.umb.sk/filter/tex/pix.php/5d3cc6ed6b8ac44ffd056d25fdb2687d.png "\small f(M)=M'[x', y']") platiť:
platiť:
 .
.
Po dosadení do transformačných rovníc dostaneme ,
,
čo je množina bodov = priamka. Neskôr ukážeme, že transformácia je zhodné zobrazenie.
Preto priamka samodružných bodov  je osou súmernosti.
je osou súmernosti.
Geometrická interpretácia - riešenie Tu - V rovine je posunutie určené vektorom
") . V posunutí sa trojuholník
. V posunutí sa trojuholník  so súradnicami
so súradnicami ![\small K = [1; 1], L = [4; 3], M = [2; 5]](https://lms.umb.sk/filter/tex/pix.php/e3495d469cb175a5fccd8317021b70f7.png "\small K = [1; 1], L = [4; 3], M = [2; 5]") zobrazí sa na
trojuholník
zobrazí sa na
trojuholník  so súradnicami
so súradnicami ![\small K'= [2; -1], L' = [5; 1], M' = [3; 3]](https://lms.umb.sk/filter/tex/pix.php/fcd9c282160c70ca989a499b862178aa.png "\small K'= [2; -1], L' = [5; 1], M' = [3; 3]") .
.
a) Narysujte obraz v GeoGebre pomocou nástroja Posunutie.
b) Nájdite analytické vyjadrenie tejto zhodnosti.
Návod: Poznáme obrazy![\small O'= [1; -2], K' = [2; -1], M' = [3; 3]](https://lms.umb.sk/filter/tex/pix.php/9e85f67c85cfe23fd070431a6d8fa740.png "\small O'= [1; -2], K' = [2; -1], M' = [3; 3]") a ich dosadením spolu so súradnicami
a ich dosadením spolu so súradnicami ![\small K = [1; 1], M = [2; 5]](https://lms.umb.sk/filter/tex/pix.php/de2eabc53d5450b1d9bdb6a8e232f2be.png "\small K = [1; 1], M = [2; 5]") do rovnice
do rovnice
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} a & c \\ b & d \\ \end{array} \right)+\left( \begin{array}{} 1 & -2\end{array} \right)")
dostaneme 4 rovnice o 4 neznámych


Riešenie.
Riešenie sústavy v GeoGebre Tu . Pomoc - otvorte si applet Tu.
Cvičenie.
- Riešte úlohy zo zbierky Monoszová - čast 4.3, 4.4. a 4.5.
- Zistite, či posunutie roviny
=X' = X+\vec{u}") pre pevne zvolený
vektor posunutia
pre pevne zvolený
vektor posunutia  je afinné zobrazenie.
je afinné zobrazenie. - Určite obraz trojuholníka , kde
![\small K = [−3; 5], L = [−5; 2], M = [1; 3]](https://lms.umb.sk/filter/tex/pix.php/49ef7f12dbd3bf345b8b2efcf2e6701b.png "\small K = [−3; 5], L = [−5; 2], M = [1; 3]") v stredovej súmernosti určené analytickým vyjadrením
v stredovej súmernosti určené analytickým vyjadrením
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} -1 & 0 \\ -1 & 0 \\ \end{array} \right)+\left( \begin{array}{} -4 & 8\end{array} \right)") . Návod pozri v práci (Ptáčková, 2016, str.64), dostupné Tu.
. Návod pozri v práci (Ptáčková, 2016, str.64), dostupné Tu. - Riešte ďalšie úlohy z práce (Ptáčková, 2016, od str.65).
- Je daná osová súmernosť osou
 , ktorá je určená bodmi
, ktorá je určená bodmi ![\small Q_1 = [-2; -3], Q_2 = [4; 3]](https://lms.umb.sk/filter/tex/pix.php/356732ad02ffeb1c057449896fc9634d.png "\small Q_1 = [-2; -3], Q_2 = [4; 3]") a štvoruholník
a štvoruholník  . Narysujte obraz
štvoruholníka obraz
. Narysujte obraz
štvoruholníka obraz  v GeoGebre pomocou nástroja Osová súmernosť. Štvoruholník zvoľte tak, aby jeho dve strany pretínali os súmernosti. Určte analytické vyjadrenie tejto osovej súmernosti. Návod analogický ako v predchádzajúcej úlohe alebo zostrojte obrazy
v GeoGebre pomocou nástroja Osová súmernosť. Štvoruholník zvoľte tak, aby jeho dve strany pretínali os súmernosti. Určte analytické vyjadrenie tejto osovej súmernosti. Návod analogický ako v predchádzajúcej úlohe alebo zostrojte obrazy  .
.
\)
Literatúra
Doporučená literatúra
- Analytická geometria v rovine a v priestore - prehľad pre SŠ. Dostupné Tu.
- Brajerčík, J., Demko, M.: Matematika pre študentov prírodovedných odborov. Kapitoly 5 a 6. Univerzitná knižnica Prešov. Dostupné Tu..
- Čižmár, J.: O význame základného poľa v geometrii. In: Matematika v proměnách věků. V. Praha: Matfyzpress, 2007. 978-80-7378-017-3, pp. 83-96. Dostupné Tu
- Belan. A.: Skriptá - preklad. Dostupné Tu.
- Duplák, J.: Afinná a Euklidovská geometria. PU v Prešove, FHPV Katedra matematiky, 2004. Dostupné Tu ..
- Hanzel, P.: Afinné transformácie - východiskové pojmy. FPV UMB B. Bystrica 2023. Dostupné Tu.
- Hanzel, P.: Rozšírené matice. Prezentácia. FPV UMB B. Bystrica 2023. Dostupné Tu.
- Hašek, R.: Linearni algebra a geometrie. Pedagogická fakulta JU, Č. Budějovice 2020. Dostupné Tu.
- Hašek, R.: Planimetrie - afinné zobrazení. Pedagogická fakulta JU, Č. Budějovice 2019. Dostupné Tu.
- Haviar, M.: Algebra III. Lineárna algebra. Pedagogická fakulta UMB, 2000, skriptá. Dostupné Tu.
- Hejný, M., Zaťko, V., Kršňák, P.: Geometria 1. SPN, Bratislava, 1985.
- Hlinená, D.: Lineárne transformácie. FEKT VUT Brno. Prenášky 7 až 10. Dostupné Tu.
- Chalmovianska, J.: Afinný priestor. FMFI UK Bratislava. Dostupné Tu.
- Chalmoviansky, P.: Geometria afinných zobrazení euklidovských priestorov. Dostupné Tu.
- Končel, J.: Využití internetu ve výuce analytické geometrie na střední škole. Diplomová práca. Univerzita Karlova v Praze, 2011. Dostupné Tu.
- Kontrová, L.,Stachová, D.: Matematický kufrík, ŽU Žílina 2011, KEGA 046 ŽU – 4/2011. Dostupné Tu. Nastavte si kapitolu 3.
- Kršňák, P.: Analytická geometria. PF Banská Bystrrica 1975.
- Vranková, E.: Geometria 2 – Analytická geometria lineárnych útvarov. Trnavská univerzita v Trnave. ISBN 978-80-8082-681-9. Dostupné Tu.
- Monoszová, G.: Analytická geometria 1 - Kapitola I, Afinný priestor. FPV UMB B. Bystrica. Dostupné Tu.
- Monoszová, G.: Analytická geometria 1 - Kapitola II, Euklidovský priestor. FPV UMB B. Bystrica. Dostupné Tu.
- Monoszová, G.: Analytická geometria 2 - Kapitola III. FPV UMB B. Bystrica. Dostupné Tu.
- Olšák, P.:Lineární algebra. Praha, 2000-2007. Dostupné Tu.
- Ptáčková, T.: Analytická reprezentace shodných zobrazení na středních školách. Diplomová práca MFF UK Praha 2016. Dostupné Tu.
- Tisoň, K.: Geometria 1. Materiály pre študentov na FMFI Bratislava, 2011. Dostupné Tu.
- Vodičková, V.: Aplikácie vektorového súčinu. Dostupné Tu.
- Zlatoš, P.: Lineárna algebra a geometria. Marenčin PT, Bratislava 2011. ISBN 9788081141119. Dostupné Tu.
- Monoszová, G.: Zbierka úloh z analytickej geometrie, FPF 2008, B. Bystrica. Prvá časť Tu. Druhá časť Tu. Výsledky Tu.
- Priklady.com - zbierka úloh s výsledkami. Kapitola - analyticka-geometria. Dostupné Tu.
- Sleziak: Vektorový priestor. Prezentácia Tu.
- Sbírka řešených úloh na Katedře didaktiky fyziky Matematicko-fyzikální fakulty UK. Dostupné Tu.
Zbierky