Projektívny priestor a kužeľosečky
| Portál: | Virtuálna Univerzita Mateja Bela |
| Kurz: | Vybrané kapitoly z aritmetiky a analytickej geometrie |
| Kniha: | Projektívny priestor a kužeľosečky |
| Vytlačil(a): | Hosťovský používateľ |
| Dátum: | streda, 29 júla 2026, 16:23 |
Opis
Interaktívna učebnica
Obsah
 |
PDF formát učebnice Tu. Stiahnite si ZIP súbor učebnice Tu. |
- Vizualizácia kužeľosečky pomocou pomeru vzdialeností od ohniska a riadiacej priamky. Interaktívny applet: Metrická definícia kužeľosečky.
- Vizualizácia kužeľosečky pomocou projektívnych zväzkov: Interaktívny applet: Projektívna definícia kužeľosečky.
Pripomenutie pojmov
- Priamka
 . Dokážte, že v ľubovoľnom n-rozmernom afinnom priestore je dvoma rôznymi bodmi
. Dokážte, že v ľubovoľnom n-rozmernom afinnom priestore je dvoma rôznymi bodmi  určená práve jedna priamka.
určená práve jedna priamka. - Priamka spájajúca dva body, z ktorých je jeden nedostupný. Dokážte analytickými metódami, že konštrukcia popísaná v applete z obrázka Spojnica bodov je korektná. Pozrite si dôkazy v práci [CECH, 1950] v časti: § 25 . Konstrukce a počet.
- ...
 \)
\)Príklady - riešené
- Zobrazenie
 v priestore
v priestore  , ktoré má vzhľadom na kanonickú bázu analytický výraz
, ktoré má vzhľadom na kanonickú bázu analytický výraz
 = x₁y₁ + x₁y₄ + 2x₂y₂ + 3x₃y₃ + 2x₃y₄ + x₄y₁ + 2x₄y₃ + 3x₄y₄")
je skalárnym súčinom. Nájdite nejakú ortogonálnu a ortonormálnu bázu priestoru. - Zadanie pre AI.
Napíšte všeobecnú rovnicu roviny , ktorá je určená bodmi
, ktorá je určená bodmi  a na súradnicovej osi z vytína úsek dĺžky 4:
a na súradnicovej osi z vytína úsek dĺžky 4: ![\small A[−1; 3; 4], B[2; −3; −1]](https://lms.umb.sk/filter/tex/pix.php/2a02b242ba3615fa95723670b62b1353.png "\small A[−1; 3; 4], B[2; −3; −1]") . Jedno riešenie klasickým spôsobom - parametricky (bodov a dvoma vektormi), druhé všeobecné riešenie pomocou vektorového súčinu, tretie bude grafické pomocou GeoGebry. Vytvor mi aj vhodný test v mathGPT spolu s linkom naň.
. Jedno riešenie klasickým spôsobom - parametricky (bodov a dvoma vektormi), druhé všeobecné riešenie pomocou vektorového súčinu, tretie bude grafické pomocou GeoGebry. Vytvor mi aj vhodný test v mathGPT spolu s linkom naň.
\)Cvičenie
- Pozrite si riešené úlohy v beamer prezentácii Tu.
- ♥ Ukážte, že zobrazenie v priestore , ktoré má vzhľadom na kanonickú bázu analytický výraz
je skalárnym súčinom. Potom ešte vyriešte čiastkové úlohy:- Nájdite nejakú ortogonálnu a ortonormálnu bázu priestoru .
- Zistite, či sú vektory
 na seba kolmé:
na seba kolmé:, \vec{y} = (2,-1,1,2)") .
. - Určte, aký uhol zvierajú vektory
 :
:, \vec{v} = (0,3,1,-1)") .
. - Určte ortogonálne doplnky podpriestorov
 v priestore :
v priestore :![\small W₁ = [x], W₂ = [u,v]](https://lms.umb.sk/filter/tex/pix.php/cce4a58b77a374d2f5d5c3d744b19345.png "\small W₁ = [x], W₂ = [u,v]") . Pozrite si riešenie od Andrii Golubtsov vo forme prezentácie Tu.
. Pozrite si riešenie od Andrii Golubtsov vo forme prezentácie Tu.
- Nájdite nejakú ortogonálnu a ortonormálnu bázu priestoru
- Daná je bilineárna forma definovaná analyticky:
=4 x_1 y_1 - 2 x_1 y_2 + 3 x_1 y_3 - 2 x_2 y_1 + 5 x_2 y_2 - x_2 y_3 + 3 x_3 y_1 - x_3 y_2 + 6 x_3 y_3")
Zistite, či predstavuje skalárny súčin. Výpočet urobte pomocou vlastných hodnôt matice formy.
\)Projektívne priestory
Projektívna geometria sa zaoberá pojmami, ktoré sa premietaním (rovnobežným, stredovým) nemenia. Pred zavedením pojmu projektívny priestor uvedieme niektoré vlastnosti lineárnej kombinície bodov v afinnom priestore. V nasledujúcej vete si všimnite, že súčet koeficientov
 je rovný 1.
je rovný 1. sa dá jednoznačne vyjadriť v tvare
sa dá jednoznačne vyjadriť v tvare

 a
a  je simplex afinného priestoru
je simplex afinného priestoru  .
.- Predchádzajúca veta platí len pre body euklidovského priestoru . Body
![E_1 = [1,0,\dots,0], \dots , E_n = [0,0,\dots,1]](https://lms.umb.sk/filter/tex/pix.php/97f4f3d9fffcd36610391659f015ecff.png "E_1 = [1,0,\dots,0], \dots , E_n = [0,0,\dots,1]") simplexu
simplexu  sú koncové body súradnicových vektorov
sú koncové body súradnicových vektorov ") ortonormálnej bázy vektorového priestoru
ortonormálnej bázy vektorového priestoru  .
. - Body
 euklidovského priestoru nazveme lineárne nezávislé, ak sú vektory
euklidovského priestoru nazveme lineárne nezávislé, ak sú vektory  lineárne nezávislé vo vektorovom priestore . Neskôr ukážeme, že vlastnosť "lineárne nezávislé" hrá dôležitú úlohu aj v projektívnom priestore.
lineárne nezávislé vo vektorovom priestore . Neskôr ukážeme, že vlastnosť "lineárne nezávislé" hrá dôležitú úlohu aj v projektívnom priestore.
 alebo vektorom
alebo vektorom ") .
. \)
\)Ideálne body
Nech
,-)") je euklidovská rovina (afinný 2-rozmerný priestor, v ktorom je definovaný skalárny súčin).
je euklidovská rovina (afinný 2-rozmerný priestor, v ktorom je definovaný skalárny súčin).♣ Ideálnym bodom rozumieme jednorozmerný vektorový podpriestor smerového priestoru
") .
. ♣ Ideálna priamka je množina všetkých ideálnych bodov tejto roviny.
,-)") je definovaný pomocou neprázdnej množiny bodov
je definovaný pomocou neprázdnej množiny bodov  a vektorového priestoru
a vektorového priestoru ") . Pre každý vektor
. Pre každý vektor ") existujú body
existujú body  také, že
také, že  .
. o všetky ideálne body. Získame tak nový,
o všetky ideálne body. Získame tak nový, ") -rozmerný projektívny priestor. Ideálny bod je v tomto priestore jednoznačne určený smerovým vektorom priamky. Každý ideálny bod v euklidovskej rovine
-rozmerný projektívny priestor. Ideálny bod je v tomto priestore jednoznačne určený smerovým vektorom priamky. Každý ideálny bod v euklidovskej rovine  je určený svojím smerovým vektorom, t. j. jednorozmerným podpriestorom . Podobne, v euklidovskom priestore má ideálny bod tiež vektorový charakter a ideálna priamka je dvojrozmerný podpriestor.
je určený svojím smerovým vektorom, t. j. jednorozmerným podpriestorom . Podobne, v euklidovskom priestore má ideálny bod tiež vektorový charakter a ideálna priamka je dvojrozmerný podpriestor.Euklidovský priestor
rozšírený o všetky ideálne body a ideálne priamky nazveme projektívny priestor. Projektívne rozšírenie roviny nazveme projektívna rovina a označíme ju symbolom  .
.Dve rôzne priamky v projektívnej rovine sa pretínajú v práve jednom bode. Dve rovnobežné priamky sa pretínajú v ideálnom bode – tento patrí na spoločnú ideálnu priamku.
V projektívnej geometrii platí princíp duality: každému výroku o bodoch a priamkach existuje duálny výrok, ktorý vznikne výmenou pojmov „bod“ a „priamka“.
\)Desargues a Pappos roviny
- kolineárnosť bodov (ležia na jednej priamke),
- priesečníky priamok,
- incidencie (vzťahy typu „bod leží na priamke“).
 je množina bodov (neprázdna),
je množina bodov (neprázdna),  – množina priamok, ktoré sú podmnožinami . Potom projektívna rovina je usporiadaná dvojica
– množina priamok, ktoré sú podmnožinami . Potom projektívna rovina je usporiadaná dvojica ") , pričom platia axiómy:
, pričom platia axiómy:P1: Pre každé dva rôzne body existuje práve jedna priamka, ktorá ich obsahuje.
P2: Pre každé dve rôzne priamky existuje práve jeden bod, ktorý leží na oboch.
P3: Existujú štyri body, z ktorých žiadne tri neležia na jednej priamke (tzv. nekolineárne).
Nech sú dané dve trojice navzájom rôznych bodov projektívnej roviny
 ,
,  tak, že
tak, že  . Potom body
. Potom body  ,
,  ,
,  sú kolineárne.
sú kolineárne.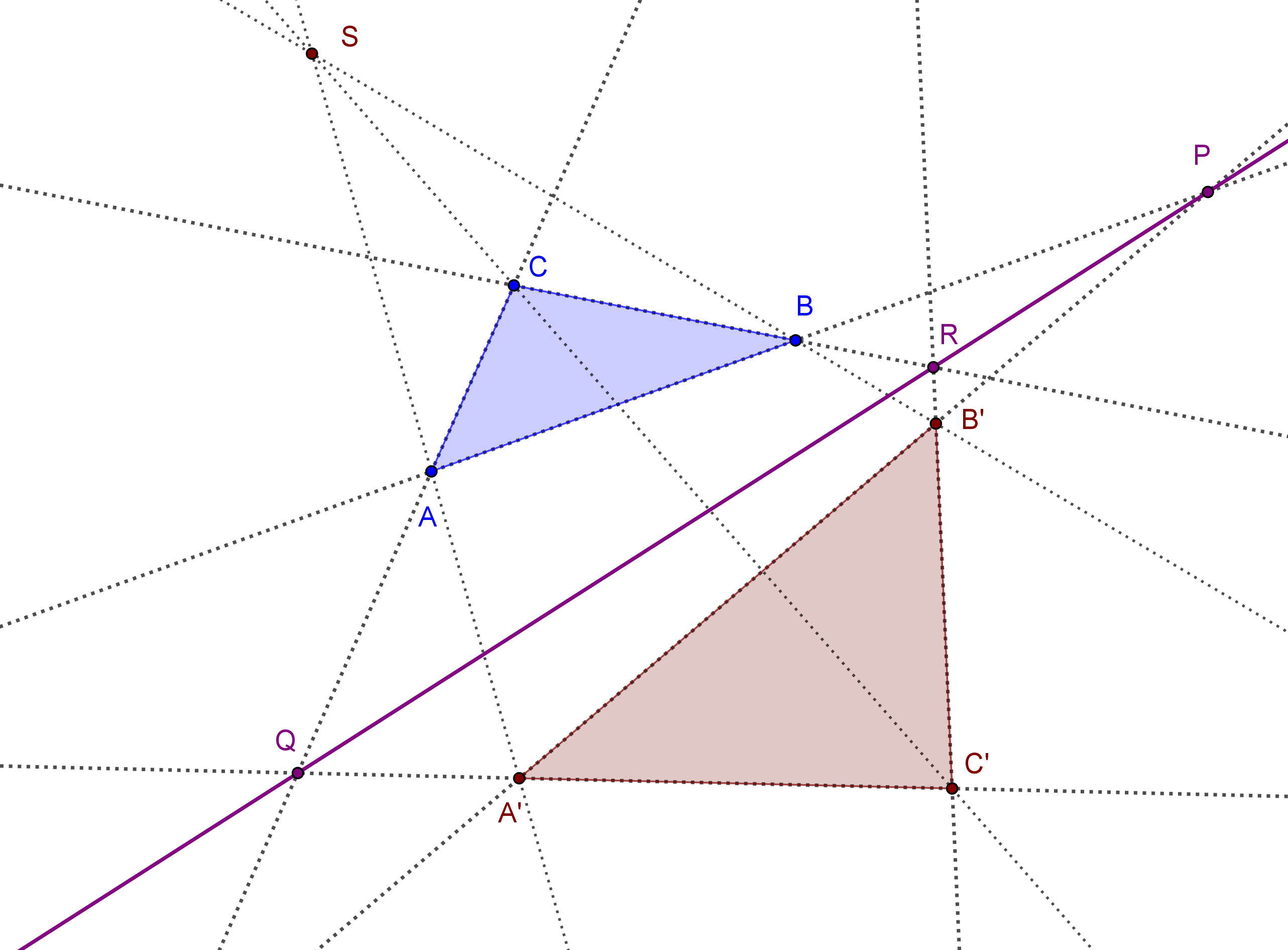
Projektívna rovina, pre ktorú platí Desarguesova axióma, sa nazýva desarguesovská rovina.
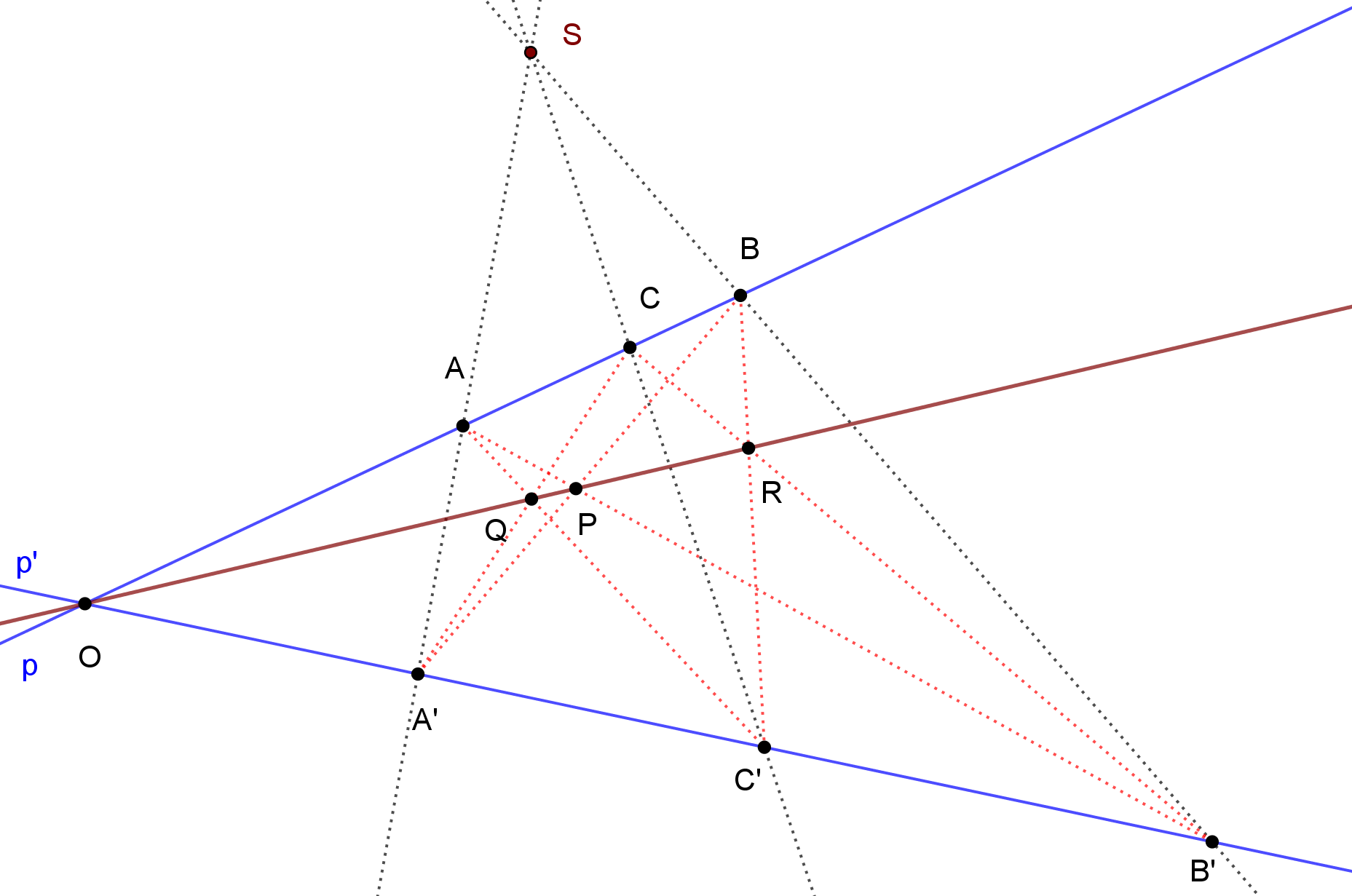
Nech
 sú dve rôzne priamky projektívnej roviny. Na priamke
sú dve rôzne priamky projektívnej roviny. Na priamke  ležia rôzne body
ležia rôzne body  , na priamke
, na priamke  rôzne body
rôzne body  , odlišné od priesečníka
, odlišné od priesečníka  . Potom body
. Potom body  ,
,  ,
,  sú kolineárne.
sú kolineárne. Prijektívna rovina, pre ktorú platí Pappova axióma P5, sa nazýva pappovská rovina. Každá pappovská rovina je zároveň aj desarguesovská, ale existujú roviny, ktoré sú desarguesovské, no nie sú pappovské.
 , z ktorých žiadne tri neležia na jednej priamke, sa nazýva úplný štvorroh. Body
, z ktorých žiadne tri neležia na jednej priamke, sa nazýva úplný štvorroh. Body  ,
,  ,
,  sa nazývajú diagonálne body a tvoria tzv. diagonálny trojuholník. Ukážte, že diagonálne body
sa nazývajú diagonálne body a tvoria tzv. diagonálny trojuholník. Ukážte, že diagonálne body  akéhokoľvek úplného štvorrohu neležia na jednej priamke. Vytvorte interaktívny applet pre takú situáciu.
akéhokoľvek úplného štvorrohu neležia na jednej priamke. Vytvorte interaktívny applet pre takú situáciu.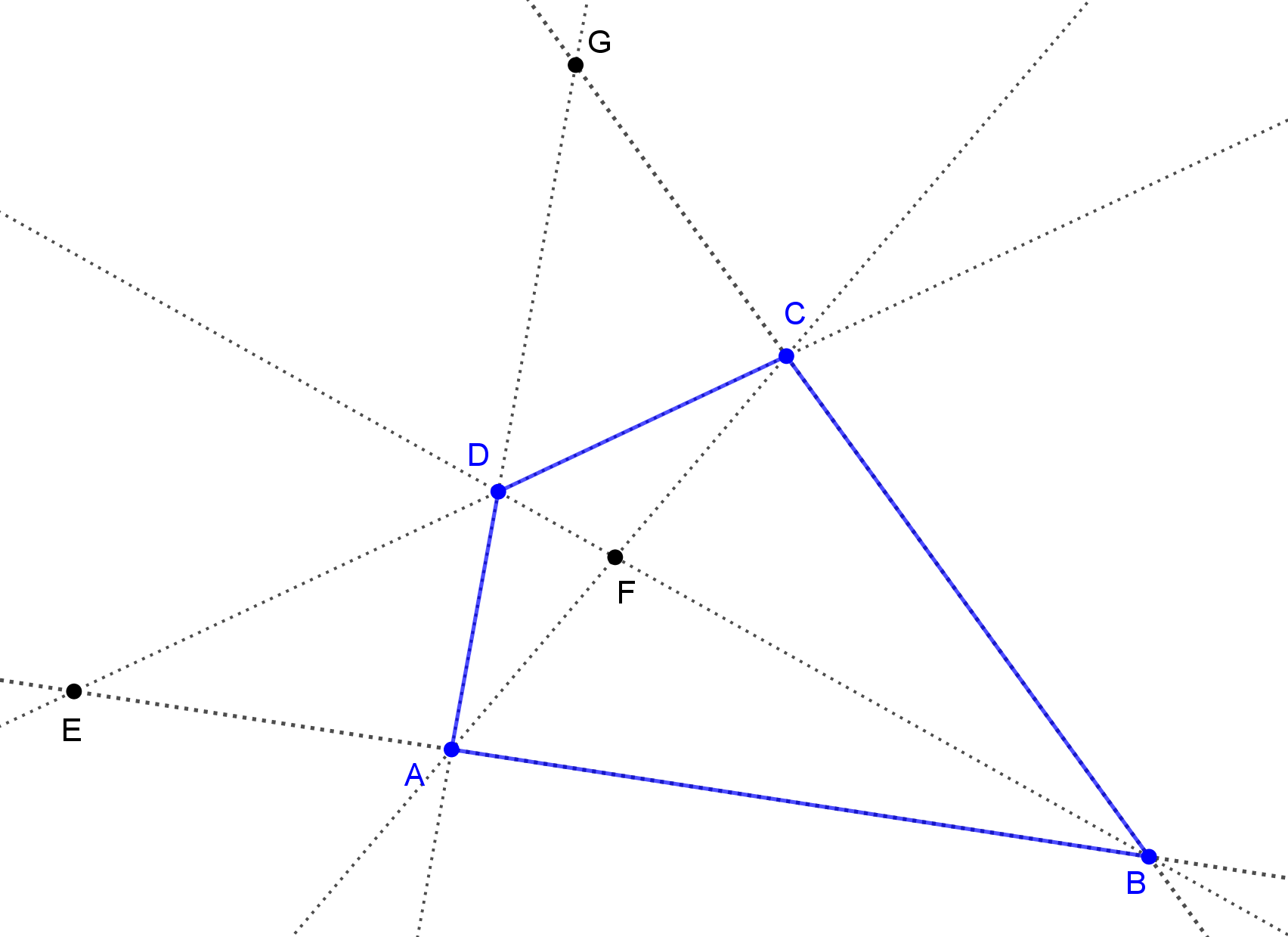 \)
\)Stredová kolineácia
Nech sú dané dve rôzne roviny
 a bod
a bod  , ktorý neleží ani v jednej z nich.
, ktorý neleží ani v jednej z nich.
- Stredová kolineácia je bijektívne zobrazenie dvoch rovín, pri ktorom každému bodu prvej roviny odpovedá jeho priemet zo stredu do roviny druhej. Používa sa aj termín perspektívna kolineácia.
- Stred premietania sa nazýva stred kolineácie. Priamku
 , priesečnicu rovín , nazývame osou stredovej kolineácie.
, priesečnicu rovín , nazývame osou stredovej kolineácie.
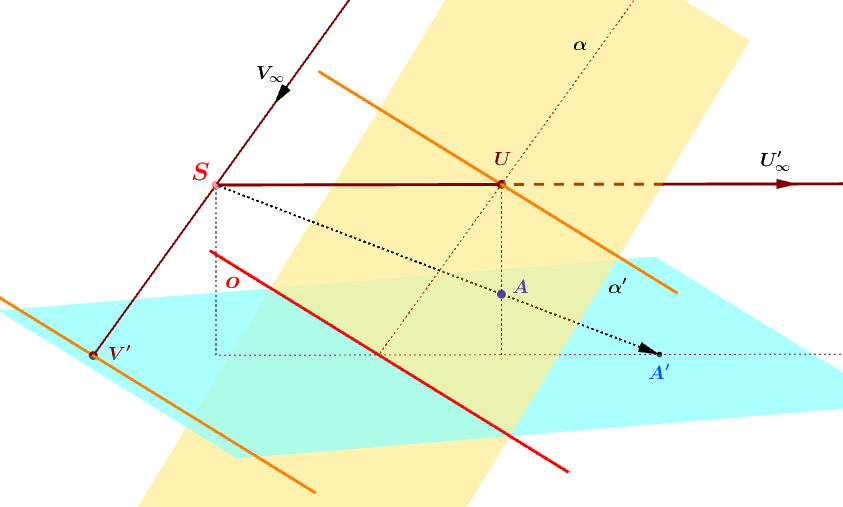
") zostrojte obe úbežnice.
zostrojte obe úbežnice.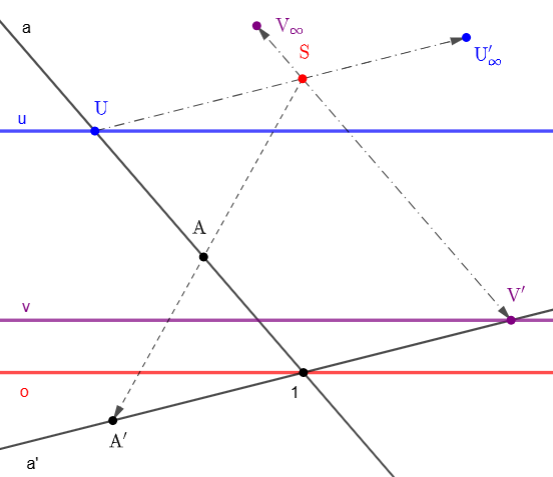
Obr. Úbežnice, otvorte si zadanie Tu. Tu. Obraz bodu v rovine Tu. Nástroj v GeoGebre pre kolineáciu si stiahnite Tu.
 ).
). Nech
 sú dva rôzne vlastné body priamky
sú dva rôzne vlastné body priamky  a nech
a nech  je ľubovoľný bod tej istej priamky .
je ľubovoľný bod tej istej priamky .
- Ak je bod vlastný, potom označíme
 .
. - Ak je bod nevlastný, potom je
 .
.
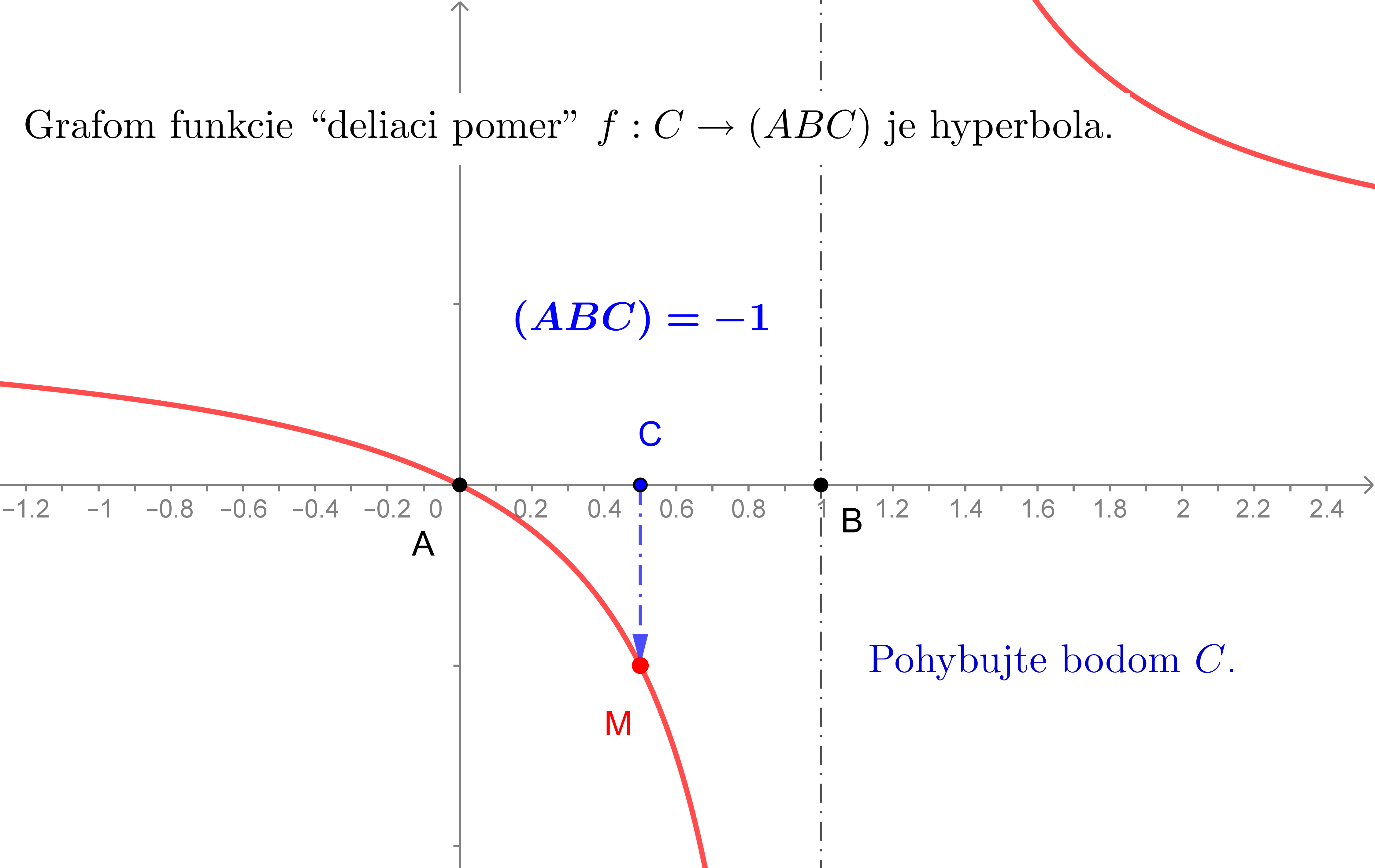

Číslo  nazývame deliac pomer bodu vzhľadom na body . Značíme ho
nazývame deliac pomer bodu vzhľadom na body . Značíme ho ") . Využitím nevlastnej limity funkcie "deliaci pomer" ukážte, že
. Využitím nevlastnej limity funkcie "deliaci pomer" ukážte, že
=\displaystyle\lim_{C\to\infty} \frac {|\overrightarrow{AC}|}{|\overrightarrow{BC}|} =1") .
.Dvojpomer sa stredovým premietaním nemení.
Nech
 sú štyri navzájom rôzne body priamky
sú štyri navzájom rôzne body priamky
- Ak body sú vlastné. Potom pomer
 , kde
, kde  sú deliace pomery bodov
sú deliace pomery bodov  vzhľadom k bodom , se nazýva dvojpomer bodov v tomto poradí a značí sa
vzhľadom k bodom , se nazýva dvojpomer bodov v tomto poradí a značí sa ") . Otvorte si dynamický applet Tu.
. Otvorte si dynamický applet Tu. - Ak niektorý z bodov je nevlastný, tak dvojpomer týchto bodov definujeme vzťahom
 = (CDAB)") .
.
- Na priamke sú dané tri rôzne body . Zostrojte bod
 tak, aby
tak, aby  = µ") , kde µ je dane reálne číslo.
, kde µ je dane reálne číslo.
Pomoc. Položte a na priamke
a na priamke  nájdite body
nájdite body  tak, aby
tak, aby  = µ") ,
,  .
. - Na priamke
![\small AB; A[4,-3]3]B[1,2]](https://lms.umb.sk/filter/tex/pix.php/5c3f93ec48b4d5e203e09ae9727ef10e.png "\small AB; A[4,-3]3]B[1,2]") určte súradnice bodu
určte súradnice bodu ![\small C[c_1,c_2]](https://lms.umb.sk/filter/tex/pix.php/14c6a99e101684bb495cb49d6cf3957a.png "\small C[c_1,c_2]") tak, aby
tak, aby =\frac {2}{3}") . Potom určte dvojpomer
. Potom určte dvojpomer ") .
.
\)Cvičenie
Riešte úlohy zo Zbierky [MON], kapitola: KUŽEĽOSEČKA AKO OBRAZ KRUŽNICE V KOLINEÁCII.
- Úloha 7.7.1. Daná je perspektívna kolineácia
") .
.
- Narysujte vzor ideálnej priamky; úbežnica 1. druhu.
- Narysujte obraz ideálnej priamky; úbežnica 2. druhu.
- Úloha 7.7.2. Daná je perspektívna kolineácia
") (
( je obraz ideálnej priamky) a bod
je obraz ideálnej priamky) a bod  . Narysujte obraz bodu v kolineácii
. Narysujte obraz bodu v kolineácii  .
. - Úloha 7.7.3. Daná je perspektívna kolineácia
") (kde
(kde  je obraz ideálnej priamky) a priamka
je obraz ideálnej priamky) a priamka  . Narysujte obraz priamky v kolineácii .
. Narysujte obraz priamky v kolineácii . - Úloha 7.7.4. Daná je perspektívna kolineácia
") (kde
(kde  je vzor ideálnej priamky) a priamka . Narysujte obraz priamky v kolineácii .
je vzor ideálnej priamky) a priamka . Narysujte obraz priamky v kolineácii . - Úloha 7.7.5. Daná je perspektívna kolineácia a rôznobežné priamky
 , pričom
, pričom  . Narysujte vzory priamok v kolineácii .
. Narysujte vzory priamok v kolineácii . - Úloha 7.7.6. Daná je perspektívna kolineácia a rôznobežné priamky , pričom
 . Narysujte vzory priamok v kolineácii .
. Narysujte vzory priamok v kolineácii . - Úloha 7.7.7. Daná je perspektívna kolineácia . Nájdite také priamky
 , že
, že  a zároveň aj pre ich obrazy platí
a zároveň aj pre ich obrazy platí  .
. - Úloha 7.7.8. Daná je perspektívna kolineácia a kružnica
 , pričom
, pričom

- je dotyčnica kružnice ,
- je sečnica kružnice .
v kolineácii . - Určenosť perspektívnej kolineácie. Zo zadaných prvkov dourčite stred kolineácie, os kolineácie a pár odpovedajúcich si bodov:
- Os kolineácie
 a dva páry odpovedajúcich si bodov
a dva páry odpovedajúcich si bodov  ;
;  .
. - Tri páry odpovedajúcich si bodov ; ;
 .
. - Stred kolineácie
 , os kolineácie a úbežník 1. druhu
, os kolineácie a úbežník 1. druhu  .
.
- Os kolineácie
- Vytvorte applet, ktorý bude interpretovať Pappovu axiómu.
- Formuluj duálnu verziu Desarguesovej vety/axiómy – teda vetu, kde sa úlohy bodov a priamok vymenia. Vytvorte applet pre duálnu verziu Desarguesovej vety.
- V rozšírenej euklidovskej rovine sú dané štyri body
 , z ktorých žiadne tri nie sú kolineárne. Nech
, z ktorých žiadne tri nie sú kolineárne. Nech  ,
,  ,
,  ,
,  ,
,  ,
,  . Dokážte, že body
. Dokážte, že body  sú kolineárne.
sú kolineárne.
(Pri dôkaze využite Desargovu vetu.) - Nech
 sú tri rôzne kolineárne body rozšírenej euklidovskej roviny a
sú tri rôzne kolineárne body rozšírenej euklidovskej roviny a  sú také body, že priamky
sú také body, že priamky  a
a  sú rôzne a pretínajú sa v bode
sú rôzne a pretínajú sa v bode  . Nech , , ,
. Nech , , ,  ,
,  ,
,  . Dokážte, že
. Dokážte, že  .
.
(Pri dôkaze využite Desargovu vetu.) - Deliaci pomer a dvojpomer
Dvojpomer.
Nech body ležia na jednej priamke. Dvojpomer usporiadanej štvorice bodov
body ležia na jednej priamke. Dvojpomer usporiadanej štvorice bodov ") je definovaný ako číslo
je definovaný ako číslo  = \frac{AC \cdot BD }{BC \cdot AD}") , kde
, kde  označuje orientovanú vzdialenosť medzi bodmi
označuje orientovanú vzdialenosť medzi bodmi  .
.- Vlastný bod medzi dvoma bodmi.
V projektívnej rovine sú dané body![\small A = [1 : 2 : 1], B = [4 : 5 : 1], C = [2.5 : 3.5 : 1]](https://lms.umb.sk/filter/tex/pix.php/43cbba39e8251efc7ef150530e852431.png "\small A = [1 : 2 : 1], B = [4 : 5 : 1], C = [2.5 : 3.5 : 1]") . Vypočítajte deliaci pomer bodu vzhľadom na body
. Vypočítajte deliaci pomer bodu vzhľadom na body  , t. j. určte
, t. j. určte ") .
. - Nevlastný bod.
Body![\small A = [2 : 1 : 1], B = [5 : 4 : 1]](https://lms.umb.sk/filter/tex/pix.php/adb673c114d64607d8eb3eabdff7637b.png "\small A = [2 : 1 : 1], B = [5 : 4 : 1]") určujú priamku. Bod
určujú priamku. Bod ![\small C = [3 : 3 : 0]](https://lms.umb.sk/filter/tex/pix.php/9373a5362eda256cc0a34d62c2e26fad.png "\small C = [3 : 3 : 0]") je nevlastný bod tejto priamky.
je nevlastný bod tejto priamky.
Určte deliaci pomer") .
. - Na priamke
![\small AB; A[1,2]3]B[-3,-2]](https://lms.umb.sk/filter/tex/pix.php/883b1cb6f0cbbee9ade81c536c25bacb.png "\small AB; A[1,2]3]B[-3,-2]") určte súradnice bodu tak, aby . Potom určte dvojpomer .
určte súradnice bodu tak, aby . Potom určte dvojpomer .
- Vlastný bod medzi dvoma bodmi.
- Dvojpomer
- Štyri vlastné body
V projektívnej rovine sú dané body![\small A = [0 : 0 : 1], B = [1 : 0 : 1], C = [2 : 0 : 1], D = [4 : 0 : 1]](https://lms.umb.sk/filter/tex/pix.php/a4ecc10f9368173acb2c7d3402f79c08.png "\small A = [0 : 0 : 1], B = [1 : 0 : 1], C = [2 : 0 : 1], D = [4 : 0 : 1]") .
.
Vypočítajte dvojpomer") .
. - Jeden bod nevlastný
Body![\small A = [1 : 0 : 1], B = [2 : 0 : 1], C = [3 : 0 : 1], D = [1 : 0 : 0]](https://lms.umb.sk/filter/tex/pix.php/a5de8c9bb2965366216f5aec858871a9.png "\small A = [1 : 0 : 1], B = [2 : 0 : 1], C = [3 : 0 : 1], D = [1 : 0 : 0]") (nevlastný bod).
(nevlastný bod).
Vypočítajte dvojpomer.
- Štyri vlastné body
- Na priamke sú dané tri rôzne body . Zostrojte bod tak, aby
 = \mu") , kde
, kde 
Pomoc. Pozrite si prácu [CHOD, 2013], str. 27. = \mu") , kde
, kde 
 na priamke
na priamke  bude meraná euklidovsky od bodu
bude meraná euklidovsky od bodu  k bodu
k bodu  . Nazveme ju orientovaná vzdialenosť a značíme ju
. Nazveme ju orientovaná vzdialenosť a značíme ju  . Vzorec pre výpočet euklidovskej pomocou skalárneho súčinu ostáva v platnosti aj pre vlastné body projektívnej roviny. Orientovanú vzdialenosť určíme pomocou normy odpovedajúceho vektora. Teda
. Vzorec pre výpočet euklidovskej pomocou skalárneho súčinu ostáva v platnosti aj pre vlastné body projektívnej roviny. Orientovanú vzdialenosť určíme pomocou normy odpovedajúceho vektora. Teda  resp. pre opačne orientovanú vzdialenosť
resp. pre opačne orientovanú vzdialenosť 
Ak platí
 , potom:
, potom:  .
. Ak je práve jeden z bodov
nevlastný, potom:  .\)
.\)Homogénna súradnicová sústava
 je rozšírením karteziánskej súradnicovej sústavy euklidovskej roviny
je rozšírením karteziánskej súradnicovej sústavy euklidovskej roviny  .
. je (jednoznačne) určený karteziánskymi súradnicami
je (jednoznačne) určený karteziánskymi súradnicami  . Teda nech platí
. Teda nech platí ![\small A=[a_1,a_2]](https://lms.umb.sk/filter/tex/pix.php/ebdb87f3f7107994b42e51811f2588fe.png "\small A=[a_1,a_2]") . Avšak bez ujmy na obecnosti môžeme takýto bod reprezentovať aj usporiadanou trojicou reálnych čísel. Vyslovíme základnú definíciu pre homogénne súradnice najskôr vlasrného a potom aj nevlastného bodu.
. Avšak bez ujmy na obecnosti môžeme takýto bod reprezentovať aj usporiadanou trojicou reálnych čísel. Vyslovíme základnú definíciu pre homogénne súradnice najskôr vlasrného a potom aj nevlastného bodu.Homogénnymi súradnicami vlastného bodu
 projektívnej roviny
projektívnej roviny  rozumieme každú usporiadanú trojicu
rozumieme každú usporiadanú trojicu ![\small [a_1, a_2, a_3], a_0 \neq 0](https://lms.umb.sk/filter/tex/pix.php/26113d1c4dbddd02972307742829fd99.png "\small [a_1, a_2, a_3], a_0 \neq 0") , pre ktorú platí
, pre ktorú platí

- Z definície vyplýva, že každý vlastný bod projektívnej roviny má nenulovú súradnicu
 .
. - Základný tvar homogénnych súradníc} vlastného bodu projektívnej roviny prestavuje usporiadanú trojicu reálnych čísel
![\small A= [a_1,a_2,1]](https://lms.umb.sk/filter/tex/pix.php/3f1a01868a928350632af8e72837e7d5.png "\small A= [a_1,a_2,1]") .
.
 euklidovskej roviny
euklidovskej roviny  . Teda aké súradnice bude mať ideálny bod projektívnej roviny
. Teda aké súradnice bude mať ideálny bod projektívnej roviny  . Definícia ideálneho bodu hovorí, že ideálny bod je jednorozmerný vektorový podpriestor. Bod môžeme chápať ako množinu
. Definícia ideálneho bodu hovorí, že ideálny bod je jednorozmerný vektorový podpriestor. Bod môžeme chápať ako množinu  , kde
, kde  je smerový vektor nejakej priamky s nevlastným bodom . Pozrite si projekt "Vysvetlenie homogénnych súradníc a projektívnej geometrie"
je smerový vektor nejakej priamky s nevlastným bodom . Pozrite si projekt "Vysvetlenie homogénnych súradníc a projektívnej geometrie" je orientovaná úsečka
je orientovaná úsečka  určená koncovými bodmi
určená koncovými bodmi  . Homogénne súradnice smeru reprezentujúceho nevlastný bod získame rozdielom homogénnych súradníc koncových bodov vektora, ktorý je jeho zvoleným reprezentantom. Dostaneme rovnosť
. Homogénne súradnice smeru reprezentujúceho nevlastný bod získame rozdielom homogénnych súradníc koncových bodov vektora, ktorý je jeho zvoleným reprezentantom. Dostaneme rovnosť
![\small \vec u=\small C-B=[c_1,c_2,1]-[b_1,b_2,1]=[c_1-b_1,c_2-b_2,0]](https://lms.umb.sk/filter/tex/pix.php/c18ea6d361b2c2b49eec11c70c5cd3c6.png "\small \vec u=\small C-B=[c_1,c_2,1]-[b_1,b_2,1]=[c_1-b_1,c_2-b_2,0]") .
.Body
sú vlastné a teda ich tretia homogénna súradnica je rovná číslu 1 a ich rozdiel bude vždy nulový. To predstavuje tretiu homogénnu súradnicu ideálneho bodu projektívnej roviny. Z uvedeného vyplýva, že reprezentant nevlastného bodu je jednoznačne určený každou usporiadanou dvojicou ![\small [u_1,u_2]](https://lms.umb.sk/filter/tex/pix.php/4c558cb1d6a74d548464ed8fe656bbe9.png "\small [u_1,u_2]") , pre ktorú platí
, pre ktorú platí ,u_2=k \dot (c_2-b_2)") . To umožňuje definovať homogénne súradnice ideálneho bodu projektívnej roviny .
. To umožňuje definovať homogénne súradnice ideálneho bodu projektívnej roviny .Homogénne súradnice ideálneho bodu projektívnej roviny
(nevlastného bodu euklidovskej roviny) sú určené trojicou
![\small [u_1, u_2, 0],](https://lms.umb.sk/filter/tex/pix.php/827b6921649e4cb002f8c5f6eb3118a5.png "\small [u_1, u_2, 0],")
![\small [u_1,u_2] \in \mathrm R \times \mathrm R](https://lms.umb.sk/filter/tex/pix.php/48ee9742c912baf5cf69a5447da2fcfe.png "\small [u_1,u_2] \in \mathrm R \times \mathrm R") sú karteziánske súradnice zvoleného reprezentanta nevlastného bodu (smeru) a tretia súradnica je rovná 0.
sú karteziánske súradnice zvoleného reprezentanta nevlastného bodu (smeru) a tretia súradnica je rovná 0. Homogénnymi súradnicami bodu projektívnej roviny
rozumieme usporiadanú trojicu
![\small [kx, ky, kz]](https://lms.umb.sk/filter/tex/pix.php/82062895131ffe0438e357012eb18ae1.png "\small [kx, ky, kz]") ,
, a
a ![[kx, ky, kz] \neq [0, 0, 0]](https://lms.umb.sk/filter/tex/pix.php/5ef0f9e8be1dd434a7bf6fac779ffa5f.png "[kx, ky, kz] \neq [0, 0, 0]") .
. Reprezentant bodu
reprezentujú triedu všetkých nenulových násobkov tej istej trojice. Napr. súradnice ![[2,3,1],[4,6,2]](https://lms.umb.sk/filter/tex/pix.php/f03b819a90b3836b3fbe6bab3d43e580.png "[2,3,1],[4,6,2]") reprezentujú totožné body v projektívnej rovine. Binárna relácia
reprezentujú totožné body v projektívnej rovine. Binárna relácia  je relácia ekvivalencie na množine
je relácia ekvivalencie na množine  . Pre pevne zvolenú usporiadanú trojicu reálnych čísel
. Pre pevne zvolenú usporiadanú trojicu reálnych čísel \neq (0, 0, 0)") množina všetkých usporiadaných trojíc
množina všetkých usporiadaných trojíc
, k\in \mathrm R \right\}")
 podľa ekvivalencie
podľa ekvivalencie  a predstavuje súradnice toho istého bodu. Triedy rozkladu budeme označovať pomocou hranatých zátvoriek:
a predstavuje súradnice toho istého bodu. Triedy rozkladu budeme označovať pomocou hranatých zátvoriek: ![[x,y,z]](https://lms.umb.sk/filter/tex/pix.php/06252bb03af82c4f9781595c45064af6.png "[x,y,z]") .
.Ľubovoľnú usporiadanú trojicu reálnych čísel
") patriacu do triedy
patriacu do triedy ![\small X=[x,y,z]](https://lms.umb.sk/filter/tex/pix.php/6679710bb0def6afc6ec4f1ea34749fc.png "\small X=[x,y,z]") rozkladu budeme nazývať reprezentant bodu
rozkladu budeme nazývať reprezentant bodu  .
.Zrejme platí: Ak
sú homogénne súradnice vlastného bodu projektívnej roviny , tak
![\left[ \frac{x}{z},\frac{y}{z}\right]](https://lms.umb.sk/filter/tex/pix.php/bbc006dd495183cf8c11e3149941eeb2.png "\left[ \frac{x}{z},\frac{y}{z}\right]")
 .
. euklidovskej roviny určený karteziánskymi súradnicami
euklidovskej roviny určený karteziánskymi súradnicami ![[x,y]](https://lms.umb.sk/filter/tex/pix.php/13ebb5c933014004778d7e59993094bb.png "[x,y]") , tak homogénne súradnice tohto vlastného bodu projektívnej roviny budú mať tvar
, tak homogénne súradnice tohto vlastného bodu projektívnej roviny budú mať tvar ![\left[ \frac{x}{z},\frac{y}{z}, 1\right]](https://lms.umb.sk/filter/tex/pix.php/d03572958becd5c96ab993d8c7550121.png "\left[ \frac{x}{z},\frac{y}{z}, 1\right]") . To umožňuje urobiť transformáciu afinných rovníc geometrických útvarov, ktoré obsahujú len vlastné body na projektívne rovnice.
. To umožňuje urobiť transformáciu afinných rovníc geometrických útvarov, ktoré obsahujú len vlastné body na projektívne rovnice.![\small S[a,b]](https://lms.umb.sk/filter/tex/pix.php/7f33825509fb0d12a559ce25e91d2059.png "\small S[a,b]") a polomerom
a polomerom  má vyjadrenie
má vyjadrenie ^2+(x-b)^2=r^2") . Po transformácii
. Po transformácii  dostaneme rovnicu kružnice v projektívnej rovine
dostaneme rovnicu kružnice v projektívnej rovine
^2+ \left(y- b z \right)^2=r^2z^2.")
Uvažujme o trojici bodov
![\small O_0 = [2,5,1],O_1 = [6,-4,2],O_2 = [1,3,0]](https://lms.umb.sk/filter/tex/pix.php/1b0cf9c192e2080273a2f81fc6ec95bb.png "\small O_0 = [2,5,1],O_1 = [6,-4,2],O_2 = [1,3,0]") , ktorá je zrejme lineárne nezávislá. Zdôvodnite toto tvrdenie. Každý bod projektívnej roviny tvorí s takouto trojicou bodov množinu lineárne závislých bodov. Preto ho možno vyjadriť ako lineárnu kombináciu
, ktorá je zrejme lineárne nezávislá. Zdôvodnite toto tvrdenie. Každý bod projektívnej roviny tvorí s takouto trojicou bodov množinu lineárne závislých bodov. Preto ho možno vyjadriť ako lineárnu kombináciu 
Určite reprezentantov
, (0,\rho_1,0), (0,0,\rho_2)") bodov
bodov  tak, aby bod
tak, aby bod ") mal vyjadrenie
mal vyjadrenie
-(0,\rho_1,0)+2 (0,0,\rho_2)")
 boli racionálne.\)
boli racionálne.\)Lineárna závislosť bodov
 sme uviedli definíciu, že body
sme uviedli definíciu, že body  sú lineárne závislé, ak sú lineárne závislé vektory
sú lineárne závislé, ak sú lineárne závislé vektory ") , kde
, kde  je počiatok súradnicového simplexu. Lineárna závislosť bodov v projektívnom priestore je koncept, ktorý rozširuje klasickú lineárnu závislosť z afinného priestoru do projektívneho prostredia.
je počiatok súradnicového simplexu. Lineárna závislosť bodov v projektívnom priestore je koncept, ktorý rozširuje klasickú lineárnu závislosť z afinného priestoru do projektívneho prostredia. Homogénne súradnice projektívneho priestoru
 umožňujú pomerne jednoducho charakterizovať závislosť bodov projektívneho priestoru.
umožňujú pomerne jednoducho charakterizovať závislosť bodov projektívneho priestoru.Body
![\small A_1=[x_{a1},y_{a1},z_{a1}], \dots , A_k=[x_{ak},y_{ak},z_{ak}]](https://lms.umb.sk/filter/tex/pix.php/37fad02f3ee6fce7e7178e5079117791.png "\small A_1=[x_{a1},y_{a1},z_{a1}], \dots , A_k=[x_{ak},y_{ak},z_{ak}]") projektívnej roviny sa nazývajú lineárne závislé práve vtedy, keď hodnosť matice
projektívnej roviny sa nazývajú lineárne závislé práve vtedy, keď hodnosť matice
")
 . Body sú lineárne nezávislé, ak nie sú lineárne závislé. Dva lineárne nezávislé body sa nazývajú aj rôzne body.
. Body sú lineárne nezávislé, ak nie sú lineárne závislé. Dva lineárne nezávislé body sa nazývajú aj rôzne body.O nasledujúcich množinách bodov zistite, či sú lineárne závislé resp. nezávislé.
,A_2=(0, 2, -1), A_3= (4, 0, 1),A_4 = (1, 1, -2)")
,A_2=(3, -6, 19.2)") \)
\)Príklad kolineácie
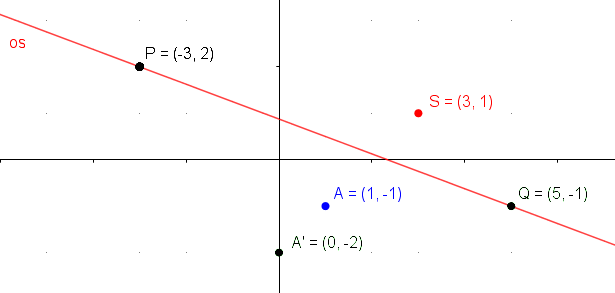
Určte maticu stredovej kolineácie, ktorá je určená stredom
 , osou
, osou  a dvojicou odpovedajúcich bodov
a dvojicou odpovedajúcich bodov  . Applet Tu.
. Applet Tu.- Zapíšte dané údaje v homogénnych súradniciach:
![\small P = [-3,2,1]^T,\; Q = [5,-1,1]^T,\; S = [3,1,1]^T,\; A = [1,-1,1]^T,\; A' = [0,-2,1]^T](https://lms.umb.sk/filter/tex/pix.php/e92e136a1d05ee015b6f84cb0c4ffa14.png "\small P = [-3,2,1]^T,\; Q = [5,-1,1]^T,\; S = [3,1,1]^T,\; A = [1,-1,1]^T,\; A' = [0,-2,1]^T") .
. - Uvažujte všeobecnú projektívnu maticu kolineácie:

kde sú neznáme reálne čísla. Matica je určená až na skalárny násobok (projektívne).
sú neznáme reálne čísla. Matica je určená až na skalárny násobok (projektívne). - Využite podmienky kolineácie:
- body osi
 sú fixné:
sú fixné:  ,
, - stred je vlastný:
 ,
, - bod má obraz
 :
:  .
.
 znamená, že existuje skalár
znamená, že existuje skalár  , pre ktorý platí
, pre ktorý platí  . Táto rovnosť poskytuje dve nezávislé lineárne rovnice pre prvky matice
. Táto rovnosť poskytuje dve nezávislé lineárne rovnice pre prvky matice  .
. - body osi
- Zostavte sústavu lineárnych rovníc pre prvky matice
 :
Pre bod
:
Pre bod :
:  \\ -3d + 2e + f = k_P(2) \\ -3g + 2h + i = k_P(1) \end{cases}") Pre bod
Pre bod :
:  \\ 5d - e + f = k_Q(-1) \\ 5g - h + i = k_Q(1) \end{cases}") Pre stred:
Pre stred:  \\ 3d + e + f = k_S(1) \\ 3g + h + i = k_S(1) \end{cases}") Pre bod:
Pre bod:  = 0 \\ d - e + f = k_A(-2) \\ g - h + i = k_A(1) \end{cases}")
Z týchto štyroch maticových rovníc dostaneme 12 homogénnych lineárnych rovníc s 13 neznámymi. Nenulové riešenie za určitých predpokladov existuje a každé iné je jeho násobkom.
V našom príklade sústava má 8 nezávislých rovníc (tretie v každej skupine je závislé), čo určí maticu do projektívneho faktora. Neznáme sú a pomocné skaláre
a pomocné skaláre  . Riešte sústavu pre . Po riešení (napr. v GeoGebre CAS si pozrite riešenie Tu) dostaneme maticu projektívne ekvivalentnú.
. Riešte sústavu pre . Po riešení (napr. v GeoGebre CAS si pozrite riešenie Tu) dostaneme maticu projektívne ekvivalentnú. - Riešenie je určené ako lineárna kombinácia dvoch parametrov
 — neznámych, ktoré môžete voliť ľubovoľne.
— neznámych, ktoré môžete voliť ľubovoľne.

To znamená, že riešenie sústavy (hľadanie matice transformácie resp. kolineácie) má 2 stupne voľnosti. Riešenie je 2-parametrická rodina matíc!Poznámky.Záver:
V projektívnej geometrii sú takéto parametre často výsledkom toho, že podmienky definujú iba tvar zobrazenia, nie jeho mierku/rozmery. Preto je miera voľnosti kladná a môžeme zvoliť hodnoty, ktoré sú výhodné:- 0 alebo 1 pre jednoduché testovanie,
- alebo také, ktoré dávajú pekné čísla v matici.
Získaná matica určuje perspektívnu kolineáciu s daným stredom , osou  a predpísanou zmenou bodu
a predpísanou zmenou bodu  . Metóda využíva jednoduché lineárne podmienky a je analogická postupu určovania afinných zobrazení z korešpondencie bodov (simplexov).
. Metóda využíva jednoduché lineárne podmienky a je analogická postupu určovania afinných zobrazení z korešpondencie bodov (simplexov).
Za nájdenie (určenie)p matice kolineácie z tohto cvičenia získate 2 plusové body.
\)\)Cvičenie
Riešte úlohy .
- Lineárna závislosť bodov
- Dokážte, že lineárna závislosť, resp. lineárna nezávislosť bodov projektívnej roviny
 nezávisí od výberu reprezentantov týchto bodov.
nezávisí od výberu reprezentantov týchto bodov. - O nasledujúcich množinách bodov zistite, či sú lineárne závislé resp. nezávislé. Body sú určené svojimi reprezentantmi:
") ,
, ") ,
, ") ;
;") ,
, ") ,
, ") .
.
- Trojica bodov
![\small O_0 = [1,0,0]](https://lms.umb.sk/filter/tex/pix.php/a2241b1e7c143c68ff291a44fa7c1f8d.png "\small O_0 = [1,0,0]") ,
, ![\small O_1 = [0,2,0]](https://lms.umb.sk/filter/tex/pix.php/05af279fed7c4c642364b0430d7baea0.png "\small O_1 = [0,2,0]") ,
, ![\small O_2 = [0,0,1]](https://lms.umb.sk/filter/tex/pix.php/28340371c2ea735f21cba1b960a7f47b.png "\small O_2 = [0,0,1]") je zrejme lineárne nezávislá. Každý bod
je zrejme lineárne nezávislá. Každý bod  projektívnej roviny tvorí s takouto trojicou množinu lineárne závislých bodov. Preto ho možno vyjadriť ako lineárnu kombináciu
Určite reprezentantov
projektívnej roviny tvorí s takouto trojicou množinu lineárne závislých bodov. Preto ho možno vyjadriť ako lineárnu kombináciu
Určite reprezentantov
, (0,\rho_1,0), (0,0,\rho_2)") bodov
bodov  tak, aby bod
tak, aby bod ") mal vyjadrenie
mal vyjadrenie  - (0,\rho_1,0) + 2(0,0,\rho_2),") a zároveň, aby čísla
a zároveň, aby čísla  boli racionálne. Pozri prácu [CIZ, 1984], str. 29.
boli racionálne. Pozri prácu [CIZ, 1984], str. 29. - Ukážte, že body s reprezentantmi
 = (2, 3,-2)") ,
,  = (1, 2, -4)") ,
,  = (0, 1, -6)") incidujú s jednou priamkou. Určite
incidujú s jednou priamkou. Určite  tak, aby
tak, aby  = \lambda (b) + \mu (c).") Určite
Určite  v trojici
v trojici ") tak, aby bod s týmto reprezentantom incidoval s priamkou
tak, aby bod s týmto reprezentantom incidoval s priamkou ") a nájdite
a nájdite  tak, aby
tak, aby  = \sigma (a) + \tau (b).") .
.
- Dokážte, že lineárna závislosť, resp. lineárna nezávislosť bodov projektívnej roviny
- Úloha 6.1.1.
Body dané karteziánskymi súradnicami vyjadrite pomocou homogénnych súradníc:![\small A[0;0], B[1;0], C[0;1], D[1;1], E[3;-2], F[-4;-3]](https://lms.umb.sk/filter/tex/pix.php/0dcb4670fb9b9ae86c6190a9041cef69.png "\small A[0;0], B[1;0], C[0;1], D[1;1], E[3;-2], F[-4;-3]")
- Úloha 6.1.2.
Vyjadrite homogénne súradnice nevlastných bodov priamok :
: 


- Úloha 6.1.3.
Vypočítajte súradnice nevlastného bodu projektívnej priamky , ak
, ak ![\small A[1;-1;3]_h, B[2;4;7]_h](https://lms.umb.sk/filter/tex/pix.php/8f1ec9790915e854b5587a8da5eecf60.png "\small A[1;-1;3]_h, B[2;4;7]_h")
- Úloha 6.1.4.
Napíšte rovnicu priamky v homogénnych súradniciach, ak v karteziánskych má rovnicu:
a)
b)
c)
- Úloha 6.1.5.
Samodružný bod afinnej transformácie, ktorá je daná rovnicami:vyjadrite homogénnymi súradnicami.

- Úloha 6.1.6.
Rovnicu kružnice napíšte v homogénnych súradniciach a uveďte homogénne súradnice aspoň jedného jej bodu.
napíšte v homogénnych súradniciach a uveďte homogénne súradnice aspoň jedného jej bodu. - Úloha 6.1.7.
V určte spoločné body kružnice  a nevlastnej priamky.
a nevlastnej priamky. - Úloha 6.1.8.
Napíšte:
a) všeobecnú rovnicu,
b) parametrické vyjadrenie projektívnej priamky, ak ![\small A[2;3;1]_h, B[7;-2;2]_h](https://lms.umb.sk/filter/tex/pix.php/d2c4ca319c088b8816b1847a2bf5a2fa.png "\small A[2;3;1]_h, B[7;-2;2]_h")
- Úloha 6.1.9.
Dokážte, že v projektívnej rovine sa každé dve rôzne priamky pretínajú práve v jednom bode. - Úloha 6.1.10.
Dokážte, že každý bod projektívnej priamky je nevlastný.
je nevlastný.
\)\)Priamka v projektívnej rovine
Dvoma rôznymi bodmi prechádza práve jedna priamka a popisuje sa primitívny vzťah incidencia.
Pomocou axiómy incidencie a primitívneho vzťahu sa vyjadruje vzájomný vzťah bodu a priamky.
V afinnej geometrii (v euklidovskej rovine
 ) priamka určená dvoma rôznymi bodmi
) priamka určená dvoma rôznymi bodmi  sa definuje ako množina bodov
sa definuje ako množina bodov
 \right\}")
 sú vlastne rôzne body, tak môžeme bez ujmy na obecnosti vysloviť definíciu:.
sú vlastne rôzne body, tak môžeme bez ujmy na obecnosti vysloviť definíciu:.Množina všetkých bodov projektívnej roviny, ktoré sú lineárne závislé od dvoch rôznych bodov
") , sa nazýva priamka (projektívnej roviny ). Budeme ju tiež symbolicky označovať ako
, sa nazýva priamka (projektívnej roviny ). Budeme ju tiež symbolicky označovať ako  . možno vyjadriť zápisom
. možno vyjadriť zápisom \in \mathrm R \times \mathrm R;\; X= k_0 A + k_1B") . Po zavedení definície priamky v projektívnej rovine môžeme dokázať vetu, ktorá charakterizuje projektívnu rovinu. Body patriace jednej priamke sa nazývajú kolineárne body.
. Po zavedení definície priamky v projektívnej rovine môžeme dokázať vetu, ktorá charakterizuje projektívnu rovinu. Body patriace jednej priamke sa nazývajú kolineárne body.Každé dve rôzne priamky v projektívnej rovine
sa pretínajú v práve jednom bode.Dôkaz. Nech sú dané priamky  . Potom lineárne vyjadrenie týchto priamok má tvar
. Potom lineárne vyjadrenie týchto priamok má tvar


Pre spoločné body  oboch priamok musí platiť
oboch priamok musí platiť

Po dosadení homogénnych súradníc ![\small A=[x_{a},y_{a},z_{a}],B=[x_{b},y_{b},z_{b}]](https://lms.umb.sk/filter/tex/pix.php/0c6efcaf08b275b4d7d29e46905fbf73.png "\small A=[x_{a},y_{a},z_{a}],B=[x_{b},y_{b},z_{b}]") ,
, ![C=[x_{c},y_{c},z_{c}], D=[x_{d},y_{d},z_{d}]](https://lms.umb.sk/filter/tex/pix.php/78e99921c7f17cde5bcaa26cd60c9e41.png "C=[x_{c},y_{c},z_{c}], D=[x_{d},y_{d},z_{d}]") bodov dostaneme lineárnu sústavu troch rovníc o štyroch neznámych
bodov dostaneme lineárnu sústavu troch rovníc o štyroch neznámych  . Keďže body
. Keďže body  a tiež body
a tiež body  sú lineárne nezávislé rôzne), tak matica sústavy má hodnosť rovnú 3. Teda vždy existuje 1-parametrické riešenie danej lineárnej sústavy - existuje aspoň jeden spoločný bod priamok.
sú lineárne nezávislé rôzne), tak matica sústavy má hodnosť rovnú 3. Teda vždy existuje 1-parametrické riešenie danej lineárnej sústavy - existuje aspoň jeden spoločný bod priamok.
Nech sú dané priamky
 , ktoré sú určené bodmi s ich homogénnymi súradnicami
, ktoré sú určené bodmi s ich homogénnymi súradnicami
![\small A=[2,1,1],B=[5,-4,1],C=[1,-2,1],D=[7,2,1]](https://lms.umb.sk/filter/tex/pix.php/3997dfbdf1888adaca5c17f4a65f862f.png "\small A=[2,1,1],B=[5,-4,1],C=[1,-2,1],D=[7,2,1]")
![\small A=[2,1,1],B=[5,3,1],C=[1,-2,1],D=[7,2,1]](https://lms.umb.sk/filter/tex/pix.php/b0f36cbc5abcecb8c3563670e1bbaf4c.png "\small A=[2,1,1],B=[5,3,1],C=[1,-2,1],D=[7,2,1]") \)
\)Vektorový súčin
 pracujeme s homogénnymi súradnicami. Body aj priamky sú reprezentované usporiadanými trojicami reálnych čísel - trojrozmernými vektormi. Napríklad pre
pracujeme s homogénnymi súradnicami. Body aj priamky sú reprezentované usporiadanými trojicami reálnych čísel - trojrozmernými vektormi. Napríklad pre
- bod:
") ,
, - priamku:
") ,
,
 leží na priamke
leží na priamke  práve vtedy, keď (pre skalárny súčin!) platí:
práve vtedy, keď (pre skalárny súčin!) platí:
 .
.Nech
 sú dva rôzne body (vektory) v projektívnej rovine. Body
sú dva rôzne body (vektory) v projektívnej rovine. Body ") ležia na priamke
ležia na priamke  , ak platí
, ak platí  . Teda musia byť splnené rovnosti:
. Teda musia byť splnené rovnosti:

 je ortogonálny (v zmysle skalárneho súčinu) na oba vektory (body) . Vektory určujú rovinu prechádzajúcu počiatkom. Vektor kolmý na túto rovinu, dostaneme pomocou vektorového súčinu
je ortogonálny (v zmysle skalárneho súčinu) na oba vektory (body) . Vektory určujú rovinu prechádzajúcu počiatkom. Vektor kolmý na túto rovinu, dostaneme pomocou vektorového súčinu  .
. Vektor
predstavuje hľadanú priamku, ktorá je určená bodmi  .
.
Určte rovnicu priamky v projektívnej rovine, ktorá je určená bodmi
, \vec{p}_2 = (3 : -1 : 1)") . je ich vektorový súčin
. je ich vektorový súčin
,\; 1 \cdot 3 - 1 \cdot 1,\; 1 \cdot (-1) - 2 \cdot 3) = (3,\; 2,\; -7).")

 získame tiež vektorovým súčinom
získame tiež vektorovým súčinom  .
.Nech sú dané priamky
 , ktoré sú určené bodmi s ich homogénnymi súradnicami
\)
, ktoré sú určené bodmi s ich homogénnymi súradnicami
\)Všeobecná rovnica priamky
projektívnej roviny a ich homogénne súradnice ![\small A=[a_0,a_1,a_2]](https://lms.umb.sk/filter/tex/pix.php/2c3e9d8765c2f2e4eaadd00f733f1f4e.png "\small A=[a_0,a_1,a_2]") ,
,![\small B=[b_0,b_1,b_2]](https://lms.umb.sk/filter/tex/pix.php/a72de65840428da75cbca3eb031d8686.png "\small B=[b_0,b_1,b_2]") . Pre súradnice ľubovoľného bodu
. Pre súradnice ľubovoľného bodu ![\small X=[x,y,z]](https://lms.umb.sk/filter/tex/pix.php/7de8155a81f0338daf8833afcd76580e.png "\small X=[x,y,z]") priamky
priamky  platí
platí
 \in \mathrm R \times \mathrm R;\; X= k_0 A + k_1B") . a po úprave dostaneme sústavu troch rovníc
. a po úprave dostaneme sústavu troch rovníc

 . Sústavu rovníc [ParRov] nazývame parametrické vyjadrenie projektívnej priamky určenej bodmi . Bod priamky je lineárne závislý od bodov . Preto matica
. Sústavu rovníc [ParRov] nazývame parametrické vyjadrenie projektívnej priamky určenej bodmi . Bod priamky je lineárne závislý od bodov . Preto matica
")
 tejto matice musí byť rovný nule. Rozvinutím determinantu podľa prvého riadku získame rovnicu s tromi neznámymi
tejto matice musí byť rovný nule. Rozvinutím determinantu podľa prvého riadku získame rovnicu s tromi neznámymi 
 \)
\)Priečka mimobežiek - návod
Nech prvá mimobežka je určená bodom
a vektorom  , druhá mimobežka bodom a vektorom
, druhá mimobežka bodom a vektorom  . Body na mimobežkách majú tvar
. Body na mimobežkách majú tvar  . Je potrebné vypočítať čísla
. Je potrebné vypočítať čísla  a
a  .
.Vektor
 - (P + x\mathbf{A})") je kolmý na vektory aj . Preto platí
je kolmý na vektory aj . Preto platí
-(P + x\mathbf{A})\bigr)\cdot \mathbf{A} = 0,\qquad \bigl((Q+ y\mathbf{B})-(P + x\mathbf{A})\bigr)\cdot \mathbf{B} = 0.")
 - y\,(\mathbf{A}\cdot \mathbf{B}) = (Q-P)\cdot \mathbf{A},")
 - y\,(\mathbf{B}\cdot \mathbf{B}) = (Q-P)\cdot \mathbf{B}.")
 sú lineárne nezávislé, determinant sústavy
sú lineárne nezávislé, determinant sústavy
\\ \mathbf{A}\cdot \mathbf{B} & -\mathbf{B}^2 \end{vmatrix} \neq 0,") a .
a .Vzdialenosť dvoch mimobežiek je potom rovná vzdialenosti nájdených bodov
 \)
\)Priečka mimobežiek - príklad
V euklidovskom modeli projektívneho priestoru
 uvažujme dve mimobežné (skew) priamky:
uvažujme dve mimobežné (skew) priamky: ,\ \vec{u}=(1,0,1),")
,\ \vec{v}=(0,1,1).")
Nájdite priečku (common perpendicular) – priamku, ktorá je kolmá zároveň na
 aj na , a určte jej parametrické rovnice.
aj na , a určte jej parametrické rovnice.- Myšlienka: Ak je priečka spojením bodov
 , potom vektor
, potom vektor  musí byť kolmý na smerové vektory
musí byť kolmý na smerové vektory  . Označme:
. Označme:

Požadujeme:
 \cdot \vec{u} = 0, \quad (\small {P} - {Q}) \cdot \vec{v} = 0.")
- Napíšeme sústavu:
 \cdot \vec{u} = 0.")
 \cdot \vec{v} = 0.")
Použijeme, {B}=(0,1,0), \vec{u}=(1,0,1), \vec{v}=(0,1,1)") .
. - Vypracovanie sústavy: Nech
") . Potom:
. Potom: .")
Po dosadení
 \cdot (1,0,1) = 0.")
 \cdot (0,1,1) = 0.")
Sústava skalárnych rovníc dáva riešenie:
- Nájdenie bodov a :
,")
.")
Vektor") , ktorý po vynásobení 3 dá smerový vektor
, ktorý po vynásobení 3 dá smerový vektor ") .
. - Rovnice priečky: Priečka
 má parametrické rovnice:
má parametrické rovnice:  + \lambda (1,1,-1)")



Overenie: a
a  .
.
 \)
\)Nech prechádza bodom ") so smerovým vektorom
so smerovým vektorom ") a prechádza bodom
a prechádza bodom ") so smerovým vektorom
so smerovým vektorom ") . Určite priečku týchto mimobežných priamok (ak existuje): nájdite body
. Určite priečku týchto mimobežných priamok (ak existuje): nájdite body  ,
,  a parametrické rovnice priamky tak, aby bol kolmý na
a parametrické rovnice priamky tak, aby bol kolmý na  aj na
aj na  .
.
Tip: postupujte rovnakým spôsobom ako v riešenom príklade (nastavte parametre  a riešte dve skalárne podmienky).
a riešte dve skalárne podmienky).
Cvičenie
Riešte úlohy .
- Dané priamky
 a
a  , ktorých homogénne súradnice bodov sú:
, ktorých homogénne súradnice bodov sú:
- Určite všeobecné aj parametrické vyjadrenie priamok
 a
a  v projektívnej rovine, ktoré sú určené bodmi s reprezentantmi
v projektívnej rovine, ktoré sú určené bodmi s reprezentantmi ![\small A = [0,0,1], \; B = [-2,3,0], \; C = [0,-1,3], \; B = [-2,3,0].](https://lms.umb.sk/filter/tex/pix.php/801cb38d710c199a8eec0e4e838d1d32.png "\small A = [0,0,1], \; B = [-2,3,0], \; C = [0,-1,3], \; B = [-2,3,0].") Určite súradnice ich spoločného bodu.
Určite súradnice ich spoločného bodu. - Napíšte rovnicu priamky v projektívnej rovine, ktorá je určená priesečnicou priamok
 a je rovnobežná s osou
a je rovnobežná s osou  .
. - Vzhľadom k afinnému repéru
![\small \langle O[0,0,0]; \vec e_1(1,0,0); \vec e_2(0,1,0); \vec e_3(0,0,1) \rangle](https://lms.umb.sk/filter/tex/pix.php/8ab48cf0d83ec34840890e26174baea0.png "\small \langle O[0,0,0]; \vec e_1(1,0,0); \vec e_2(0,1,0); \vec e_3(0,0,1) \rangle") v
v  je daná priamka všeobecným vyjadrením
je daná priamka všeobecným vyjadrením  Určite rovnice priamky v indukovaných homogénnych súradniciach a určite súradnice nevlastného bodu priamky . Pozri prácu [JAN, 2001], str. 23.
Určite rovnice priamky v indukovaných homogénnych súradniciach a určite súradnice nevlastného bodu priamky . Pozri prácu [JAN, 2001], str. 23. - Určte v priestore vzdialenosť bodu
![\small G = [-1,4,-1]](https://lms.umb.sk/filter/tex/pix.php/1da042e5dd6e9fed60733d69dc14324c.png "\small G = [-1,4,-1]") od priamky prechádzajúcej bodmi
od priamky prechádzajúcej bodmi ![\small P_1 = [7,3,4]](https://lms.umb.sk/filter/tex/pix.php/3f4168bb8bbaaf9e54c62c32a4994856.png "\small P_1 = [7,3,4]") a
a ![P_2 = [3,4,7]](https://lms.umb.sk/filter/tex/pix.php/35a8464759b5aff57e0828ef06aba60c.png "P_2 = [3,4,7]") .
. - Určte priečku dvoch mimobežiek určených bodmi
![\small P = [1,0,1],\; A_\infty= [1,2,0]](https://lms.umb.sk/filter/tex/pix.php/2eb8177eea8ec208f6462c333169098d.png "\small P = [1,0,1],\; A_\infty= [1,2,0]") a
a ![\small Q_\infty= [0,1,0],\;B = [0,1,1]](https://lms.umb.sk/filter/tex/pix.php/9e76a069d5a3b3ce29b6a691b2ff2c90.png "\small Q_\infty= [0,1,0],\;B = [0,1,1]") .
.
Výsledok: Priečka prechádza bodom") so smerovým vektorom
so smerovým vektorom ") . Parametricky
. Parametricky
.")
![\small A = [2,1,1],B = [5,-4,1],C = [1,-2,1], D = [7,2,1]](https://lms.umb.sk/filter/tex/pix.php/68f1d0d5481015a163f277e90ff85925.png "\small A = [2,1,1],B = [5,-4,1],C = [1,-2,1], D = [7,2,1]")
![\small A = [2,1,1],B = [5,3,1],C = [1,-2,1], D = [7,2,1]](https://lms.umb.sk/filter/tex/pix.php/be114b3eadad42046250177184fefb9c.png "\small A = [2,1,1],B = [5,3,1],C = [1,-2,1], D = [7,2,1]") \)
\)Kružnica v projektívnej rovine
Fermat kružnicu definoval ako množinu bodov, ktoré majú konštantnú vzdialenosť
od stredu, pričom túto vzdialenosť opisoval algebraicky. Fermat používal písmená na označenie premenných/vzdialeností, ktoré zodpovedali dĺžkam úsekov.- Predstavme si, že
 označujú vzdialenosti bodu
označujú vzdialenosti bodu  od dvoch pevných referenčných priamok
od dvoch pevných referenčných priamok  , ktoré sú na seba kolmé.
, ktoré sú na seba kolmé.
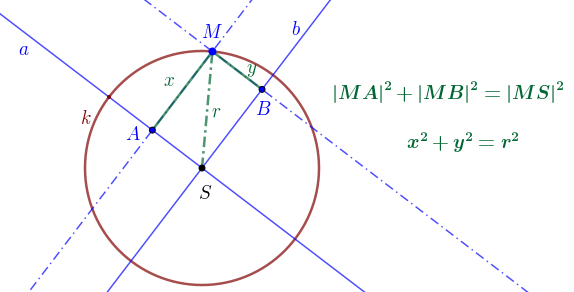
- Kružnica je potom definovaná ako súčet druhých mocnín týchto vzdialeností a tento súčet je rovný štvorcu polomeru:
 . To vyplýva z Pytagorovej vety, z euklidovskej geometrie.
. To vyplýva z Pytagorovej vety, z euklidovskej geometrie.
možno generalizovať, a tak vznikla karteziánska sústava. \)Kružnica - pojem
Kružnica
") určená stredom a polomerom
určená stredom a polomerom  je množina všetkých bodov
je množina všetkých bodov ![\small X = [x,y]](https://lms.umb.sk/filter/tex/pix.php/663b47b563ec9cfd9316955aaf2fc562.png "\small X = [x,y]") afinnej roviny, ktoré majú od pevného bodu
afinnej roviny, ktoré majú od pevného bodu ![\small S = [s_1, s_2]](https://lms.umb.sk/filter/tex/pix.php/100f51f197e9bad2058f02097dcd5954.png "\small S = [s_1, s_2]") konštantnú vzdialenosť
konštantnú vzdialenosť  .
. Formálne zapísané: ^2+(y-s_2)^2} =r^2") . Rovnica kružnice má tvar
. Rovnica kružnice má tvar
^2+(y-s_2)^2 =r^2") .
.Zistite, či body
![\small A[2; 1], B[2; 5], C[4; 5] a D[-1; 2]](https://lms.umb.sk/filter/tex/pix.php/e06b8ea6c21d226e7924102784a372dd.png "\small A[2; 1], B[2; 5], C[4; 5] a D[-1; 2]") leží na tej istej kružnici.
leží na tej istej kružnici.Daná je kružnica
") rovnicou
rovnicou ^2=r^2") a ľubovoľný bod roviny. Reálne číslo
a ľubovoľný bod roviny. Reálne číslo
=|SM|^2-r^2")
nazývame mocnosť bodu vzhľadom na kružnicu  .
.
Pre mocnosť bodu
ku kružnici platí:
 > 0 \quad \Leftrightarrow \quad |SM| >r \quad \Leftrightarrow \quad M") je vonkajším bodom kružnice ;
je vonkajším bodom kružnice ; =0 \quad \Leftrightarrow \quad |SM| =r \quad \Leftrightarrow \quad M") leží na kružnici ;
leží na kružnici ; < 0 \quad \Leftrightarrow \quad |SM| < r \quad \Leftrightarrow \quad M") je vnútorným bodom kružnice .
je vnútorným bodom kružnice .
Dôkaz tohto tvrdenia nájdete Tu (v kurze Planimetria).
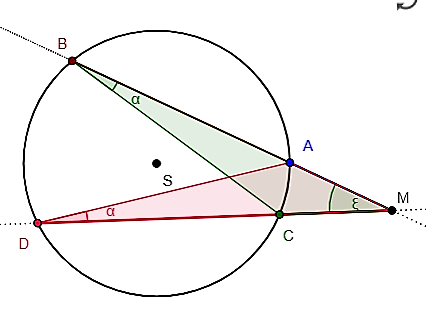
Mocnosť bodu
ku kružnici nezávisí od polohy sečnice kružnice, ktorá prechádza bodom .- Uvažujme o trojuholníkoch
 .
. - Obvodové uhly k oblúku
 pri vrcholoch
pri vrcholoch  sú zhodné.
sú zhodné. - Uhol
 pri vrchole je spoločný pre obidva trojuholníky.
pri vrchole je spoločný pre obidva trojuholníky. - Trojuholníky sú podobné.
- Pre pomery odpovedajúcich strán platí
 .
. - Odtiaľ dostávame
 konštanta.
konštanta. - Tým je dôkaz ukončený.
Dotyčnica kružnice
, ktorá je určená stredom a polomerom , v bode ![\small T = [t_1, t_2]](https://lms.umb.sk/filter/tex/pix.php/8e9bec96625f0aece2c816de97e71d3d.png "\small T = [t_1, t_2]") má rovnicu
má rovnicu
(t_1-s_1)+(y-s_2)(t_2-s_2)=r^2") .
.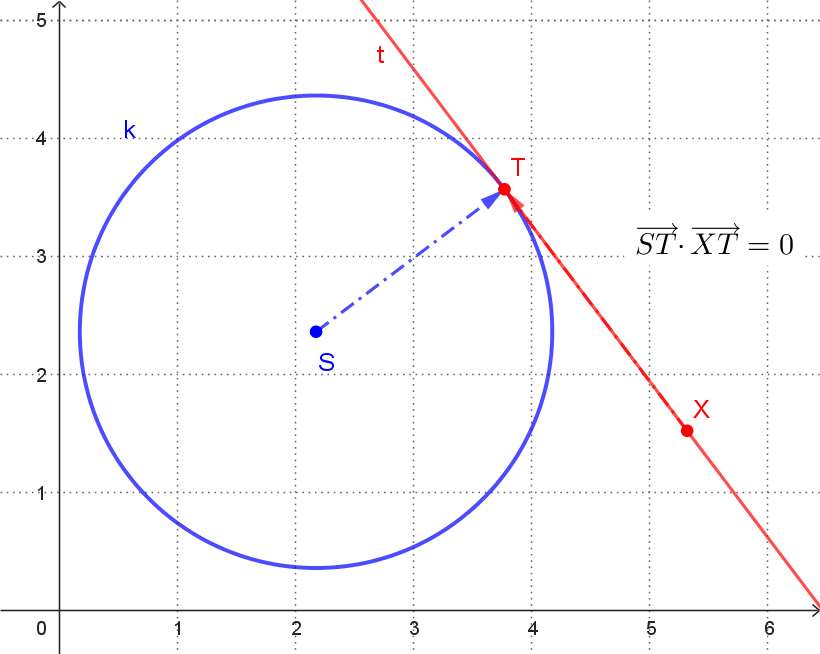 je všeobecnou rovnicou priamky s normálovým vektorom
je všeobecnou rovnicou priamky s normálovým vektorom ") . Dotyčnica ku kružnici v bode musí byť kolmá na vektor
. Dotyčnica ku kružnici v bode musí byť kolmá na vektor  . To naša priamka spĺňa, pretože vektor je jej normálovým vektorom.
. To naša priamka spĺňa, pretože vektor je jej normálovým vektorom.Nájdite rovnicu dotyčnice kružnice
 v jej bode
v jej bode ![\small T[4; -2]](https://lms.umb.sk/filter/tex/pix.php/641882f06a5760897b4d6277970b20db.png "\small T[4; -2]") .
.- Z predchádzajúcej vety vieme, ako zo stredovej rovnice kružnice jednoducho určíme rovnicu jej dotyčnice v nejakom bode. Doplníme teda výrazy
 na druhej mocniny dvojčlenov
na druhej mocniny dvojčlenov  a určíme jej stredovú rovnicu:
a určíme jej stredovú rovnicu: ^2 + (y - 2)^2 = 25") .
. - Rovnica dotyčnice v bode má podľa vyššie uvedenej vety tvar:
 (t_1 - 1) + (y - 2) (t_2 - 2) = 25") .
. - .Aby sme získali rovnicu dotyčnice v bode , stačí dosadiť súradnice bodu T:
(4 - 1) + (y - 2)(-2 - 2) = 25,\\ 3(x - 1) + (-4)(y - 2) = 25,\\ 3x - 3 - 4y + 8 = 25,\\ 3x - 4y - 20 = 0") .
.
![\small Z = [z1, z2]](https://lms.umb.sk/filter/tex/pix.php/3141bbba4cb59810053563f1d51b152e.png "\small Z = [z1, z2]") , ktorý neleží na kružnici a je rôzny od stredu kružnice, tak dostaneme rovnicu poláry bodu
, ktorý neleží na kružnici a je rôzny od stredu kružnice, tak dostaneme rovnicu poláry bodu  .
. Ak polára bodu
má s kružnicou spoločné body, tak tieto sú dotykovými bodmi dotyčníc vedených z bodu k danej kružnici. Sú dané dve kružnice ^2 - r2_1 = 0, k_2 : (X - S_2)^2 -r^2_2 = 0") , ktoré sa pretínajú práve v dvoch bodoch. Zväzkom kružníc rozumieme množinu všetkých kružníc, ktorých rovnice sa dajú vyjadriť v tvare
, ktoré sa pretínajú práve v dvoch bodoch. Zväzkom kružníc rozumieme množinu všetkých kružníc, ktorých rovnice sa dajú vyjadriť v tvare
![\small \lambda_1[(X-S_1)^2-r^2_1]+\lambda_2[(X-S_2)^2-r^2_1]=0](https://lms.umb.sk/filter/tex/pix.php/2f0a04d7fd607c9c680c8cf81b05cb8b.png "\small \lambda_1[(X-S_1)^2-r^2_1]+\lambda_2[(X-S_2)^2-r^2_1]=0")
 sú ľubovoľné reálne čísla, z ktorých aspoň jedno je rôzne od nuly. Pre
sú ľubovoľné reálne čísla, z ktorých aspoň jedno je rôzne od nuly. Pre  je rovnicou [Zvaz] určená chordála daného zväzku kružníc, t.j. všetky body tejto priamky majú rovnakú mocnosť vzhľadom na kružnice
je rovnicou [Zvaz] určená chordála daného zväzku kružníc, t.j. všetky body tejto priamky majú rovnakú mocnosť vzhľadom na kružnice  , pretože platí
, pretože platí
![\small [(X-S_1)^2-r^2_1]-[(X-S_2)^2-r^2_2]=0 \quad \Leftrightarrow \quad \mu_{k_1}(X)=\mu_{k_2}(X)](https://lms.umb.sk/filter/tex/pix.php/982be9c95847f7c8bafe203e52dccb03.png "\small [(X-S_1)^2-r^2_1]-[(X-S_2)^2-r^2_2]=0 \quad \Leftrightarrow \quad \mu_{k_1}(X)=\mu_{k_2}(X)")
, k_2(S_2, T_2)") nazývame ortogonálne
nazývame ortogonálne  práve vtedy, keď ich dotyčnice zostrojené v spoločnom bode sú navzájom kolmé. Platí
práve vtedy, keď ich dotyčnice zostrojené v spoločnom bode sú navzájom kolmé. Platí ^2-r^2_1-r^2_2 = 0") .
. V ďalšej časti opäť využijeme, že kružnica je určená stredom
![\small S[a,b]](https://lms.umb.sk/filter/tex/pix.php/06c91f27019a62308ef13c14021b4f91.png "\small S[a,b]") a polomerom
a polomerom  . Potom jej rovnicu v afinnej rovine už poznáme ako
. Potom jej rovnicu v afinnej rovine už poznáme ako
^2 + (y - b)^2 = r^2.")
 ) dostávame rovnicu
) dostávame rovnicu
^2 + (y - b z)^2 - r^2 z^2 = 0,") . Aby sme určili, kde kružnica daná rovnicou [ProjK] pretína ideálnu priamku, dosadíme
. Aby sme určili, kde kružnica daná rovnicou [ProjK] pretína ideálnu priamku, dosadíme  :
:

![\small [a ; b ; 1]](https://lms.umb.sk/filter/tex/pix.php/3646368532480614822578a43df648c9.png "\small [a ; b ; 1]") . Rovnica [k] nemá reálne riešenia okrem nulového vektora, ktorý nezodpovedá žiadnemu projektívnemu bodu. Preto kružnica v reálnej projektívnej rovine nepretína ideálnu priamku v žiadnom reálnom bode}. Riešenia rovnice
. Rovnica [k] nemá reálne riešenia okrem nulového vektora, ktorý nezodpovedá žiadnemu projektívnemu bodu. Preto kružnica v reálnej projektívnej rovine nepretína ideálnu priamku v žiadnom reálnom bode}. Riešenia rovnice  však existujú v komplexnej rovine. Sú to body s homogénnymi súradnicami
však existujú v komplexnej rovine. Sú to body s homogénnymi súradnicami
![\small [1 ; i ; 0] \quad \text{a} \quad [1 ; -i ; 0],](https://lms.umb.sk/filter/tex/pix.php/3915e7c7f0c3dddd1c77f01d7b91fe3b.png "\small [1 ; i ; 0] \quad \text{a} \quad [1 ; -i ; 0],")
") každá kružnica, bez ohľadu na svoj stred, pretína ideálnu priamku v dvoch (komplexných) bodoch, ktorých reprezentanti sú
každá kružnica, bez ohľadu na svoj stred, pretína ideálnu priamku v dvoch (komplexných) bodoch, ktorých reprezentanti sú ![\small [1; i ; 0] , [1; -i ; 0]](https://lms.umb.sk/filter/tex/pix.php/87e0c7f05a0dd908f3192d597e74850b.png "\small [1; i ; 0] , [1; -i ; 0]") .
.Aj keď izotropické body neležia v reálnom modeli projektívnej roviny, reprezentujú všetky možné smerové vektory dotyčníc ku kružnici – v komplexnom rozšírení. V tomto zmysle môžeme kružnicu chápať ako objekt, ktorý „smeruje“ do dvoch fixných komplexných bodov v nekonečne. Práve tieto izotropické body zabezpečujú, že všetky kružnice v projektívnej rovine patria do tej istej triedy kvadratických kriviek.
\)Kvadratická forma
 je reálna symetrická matica
je reálna symetrická matica
")
") je projektívny bod patriaci danej kvadratickej forme. Po prevedení maticového súčinu dostaneme všeobecnú rovnicu kvadratickej formy [KvadFor]. Všeobecná homogenizovaná kvadratická rovnica kužeľosečky má tvar
je projektívny bod patriaci danej kvadratickej forme. Po prevedení maticového súčinu dostaneme všeobecnú rovnicu kvadratickej formy [KvadFor]. Všeobecná homogenizovaná kvadratická rovnica kužeľosečky má tvar





![\small [I = [1;i;0], \qquad J = [1;-i;0], \qquad A = [0;r;1].](https://lms.umb.sk/filter/tex/pix.php/83d498ff463011c7c07ceb7a326781b3.png "\small [I = [1;i;0], \qquad J = [1;-i;0], \qquad A = [0;r;1].")
- Podmienky pre izotropické body
Dosadíme") :
Podobne pre
:
Podobne pre\,Q\,(1,i,0)^T = a_{11} + 2i a_{12} + a_{22} i^2= a_{11} - a_{22} + 2i a_{12} = 0.")
") bude
Z týchto dvoch podmienok dostávame
bude
Z týchto dvoch podmienok dostávame

- Zredukovaný tvar matice
Po dosadení týchto podmienok má matica tvar
, \qquad a:=a_{11}=a_{22}.")
- Podmienka pre bod
![\small A=[0;r;1]](https://lms.umb.sk/filter/tex/pix.php/e8b3513852c68f9395c55034d84cc726.png "\small A=[0;r;1]")
Dosadíme") do
do  :
Teda platí lineárna väzba
:
Teda platí lineárna väzba\,Q\,(0,r,1)^T= a r^2 + 2 a_{23} r + a_{33} = 0.") .
.
")
- Normalizácia a voľné parametre
Matica má po zavedení podmienok zredukovaný tvar, pričom koeficienty  spĺňajú lineárnu väzbu . Po započítaní projektívnej škály (násobenie matice nenulovým číslom nemení kužeľosečku) ostáva ešte jedna voľnosť. To znamená, že trojica bodov
spĺňajú lineárnu väzbu . Po započítaní projektívnej škály (násobenie matice nenulovým číslom nemení kužeľosečku) ostáva ešte jedna voľnosť. To znamená, že trojica bodov  určuje rodinu kužeľosečiek.
určuje rodinu kužeľosečiek.
Nech je daná kružnica stredom v počiatku súradnej sústavy a reálnym bodom tejto kružnice
![\small A = [0 ; r ; 1]](https://lms.umb.sk/filter/tex/pix.php/cfa4e4b25cc019257b77f0493a28b78e.png "\small A = [0 ; r ; 1]") . Ukážte, že homogenizovaná rovnica kružnice je
. Ukážte, že homogenizovaná rovnica kružnice je  .
.Pozrite si učebnicu, str. 74. V afinnej rovine ( ) dostávame známu rovnicu kružnice:
) dostávame známu rovnicu kružnice:

Vzhľadom na symetriu izotropických bodov, je zrejmé, že stred kružnice prechádzajúcej izotropickými bodmi musí ležať na súradnej osi
 . Pozrite si obrázok Kružnica prechádzajúca bodom.
. Pozrite si obrázok Kružnica prechádzajúca bodom.
Obr. Kružnica prechádzajúca bodom. Applet si stiahnete Tu.
Takto sme určili rovnicu kružnice prechádzajúcu daným reálnym bodom a izotropickými bodmi na nekonečne.
Izotropické body zabezpečujú, že všetky kružnice v projektívnej rovine patria do tej istej triedy kvadratických kriviek. V tzv. konformnej projektívnej geometrii (napr. v modeli Cayley-Klein) zohrávajú izotropické body úlohu spoločných bodov všetkých kružníc a umožňujú definovať metrické pojmy ako pravý uhol alebo dĺžku pomocou čisto projektívnych nástrojov.izotropické body zabezpečujú, že všetky kružnice v projektívnej rovine patria do tej istej triedy kvadratických kriviek.
\)Cvičenie
Riešte úlohy zo zbierky [BILL], kapitola 2.1.Kružnica a zväzky kružníc.
Riešte úlohy zo zbierky [MON], kapitola 7.1. KRUŽNICA.
Pokúste sa afinné riešenia niektorých úloh transformovať na projektívne homogénne rovnice.
- Úloha 7.1.1. Zistite, ktorá z rovníc je rovnicou kružnice
- Úloha 7.1.2. Dokážte, že
 je rovnica kružnice. Určte jej stred a polomer.
je rovnica kružnice. Určte jej stred a polomer. - Úloha 7.1.3. Rozhodnite, ktorý z bodov
![\small A[4;3],\; B[1;-2],\; C[3+2\sqrt{3};0],\; D[2;-3]](https://lms.umb.sk/filter/tex/pix.php/ec86523422f60493235955f3bdd96ca6.png "\small A[4;3],\; B[1;-2],\; C[3+2\sqrt{3};0],\; D[2;-3]") leží vo vnútri, zvonku alebo na kružnici . Potom situáciu znázornite.
leží vo vnútri, zvonku alebo na kružnici . Potom situáciu znázornite. - Úloha 7.1.4. Určte reálne číslo
 , tak aby priamka bola dotyčnicou kružnice . Určte súradnice dotykového bodu.
, tak aby priamka bola dotyčnicou kružnice . Určte súradnice dotykového bodu. 
- Úloha 7.1.5. Určte podmienky pre reálne číslo
 , aby priamka bola sečnicou kružnice . Potom narysujte úlohu pre vhodne zvolené .
, aby priamka bola sečnicou kružnice . Potom narysujte úlohu pre vhodne zvolené . 
- Úloha 7.1.6. Určte podmienky pre
 , tak aby priamka bola a) sečnicou, b) dotyčnicou kružnice .
, tak aby priamka bola a) sečnicou, b) dotyčnicou kružnice . 
- Úloha 7.1.7. Určte prienik kružnice a priamky .

- Úloha 7.1.8. Napíšte rovnicu kružnice, ktorá prechádza bodmi a jej stred leží na priamke .
- Úloha 7.1.9. Určte rovnicu kružnice, ktorá prechádza bodmi . Určte aj jej stred a polomer. Potom situáciu narysujte.
- Úloha 7.1.10. Určte prienik kružnice a priamky v závislosti od parametra
 .
. ^2 + (y-5)^2 = 16; \qquad p:\; 3x + 2y + d = 0.")
- Úloha 7.1.11. Napíšte rovnicu priamky, na ktorej leží priemer kružnice kolmý na priamku .

- Úloha 7.1.12. Určte stred a polomer kružnice, ktorá sa dotýka osí a a prechádza bodom
![A[4;2]](https://lms.umb.sk/filter/tex/pix.php/3864384329e49a4cd636adb4c4215339.png "A[4;2]") .
. - Úloha 7.1.13. Napíšte rovnicu kružnice vpísanej do trojuholníka
 :
: ![\small A\!\left[\tfrac{5\sqrt3}{2},\tfrac{7}{2}\right],\; B[0;1],\; C\!\left[\tfrac{5\sqrt3}{2},-\tfrac{3}{2}\right].](https://lms.umb.sk/filter/tex/pix.php/b9dfe48be90dbfff71bdc5f6893ed686.png "\small A\!\left[\tfrac{5\sqrt3}{2},\tfrac{7}{2}\right],\; B[0;1],\; C\!\left[\tfrac{5\sqrt3}{2},-\tfrac{3}{2}\right].")
- Úloha 7.1.14. Napíšte rovnicu kružnice prechádzajúcej bodmi
 a dotýkajúcej sa osi :
a dotýkajúcej sa osi : ![\small K[2;2],\; L\bigl[6;\;2\sqrt2+2\bigr].](https://lms.umb.sk/filter/tex/pix.php/8eea06b5e5c63aa357967c73cd5575ae.png "\small K[2;2],\; L\bigl[6;\;2\sqrt2+2\bigr].")
- Úloha 7.1.15. Napíšte rovnicu kružnice s polomerom
 , ktorá sa dotýka kružnice a priamky
, ktorá sa dotýka kružnice a priamky  :
: ^2 + \Bigl(y-\tfrac{5\sqrt5}{3}\Bigr)^2 = 4,\qquad l:\; x - y - 3\sqrt2 = 0.")
- Úloha 7.1.16. Určte prienik kružníc
 a
a  , ak
, ak 
- Úloha 7.1.17. Dané sú body
![\small A[3;7],\; B[0;1]](https://lms.umb.sk/filter/tex/pix.php/f1b4cb450db96156ecb340d24da0ca20.png "\small A[3;7],\; B[0;1]") . Určte množinu
. Určte množinu 




![\small A[-2;3],\; B[3;1],\; p:\; x - 3y - 3 = 0.](https://lms.umb.sk/filter/tex/pix.php/d7b8daf40d15686dd27c130c047fb93a.png "\small A[-2;3],\; B[3;1],\; p:\; x - 3y - 3 = 0.")
![\small A[1;3],\; B[-3;1],\; p:\; 2x - y - 8 = 0.](https://lms.umb.sk/filter/tex/pix.php/67014d975b91c0f33a2891fde6f9dceb.png "\small A[1;3],\; B[-3;1],\; p:\; 2x - y - 8 = 0.")
![\small A[1;1],\; B[1;-1],\; C[2;0].](https://lms.umb.sk/filter/tex/pix.php/a9cd380a86551e3fc5a12d726418de0c.png "\small A[1;1],\; B[1;-1],\; C[2;0].")
![\small A[-1;5],\; B[-2;-2],\; C[5;5].](https://lms.umb.sk/filter/tex/pix.php/d3fa306770a3153d651acbbcbb9f2c0e.png "\small A[-1;5],\; B[-2;-2],\; C[5;5].") \)
\)Kolineácia projektívnej roviny
Nech
 sú dve rôzne priamky a bod , ktorý nie je incidentný s priamkami . Zobrazenie
sú dve rôzne priamky a bod , ktorý nie je incidentný s priamkami . Zobrazenie  \rightarrow R(q)") , ktoré bodu
, ktoré bodu  priradí bod
priradí bod  , sa nazýva perspektívnosťou (perspektívnym zobrazením) množiny bodov
, sa nazýva perspektívnosťou (perspektívnym zobrazením) množiny bodov ") priamky na množinu bodov
priamky na množinu bodov ") priamky
priamky  . Bod sa nazýva stredom perspektívnosti
. Bod sa nazýva stredom perspektívnosti  . predstavuje množinu všekých bodov priamky .
. predstavuje množinu všekých bodov priamky .
Perspektívnosť v rovine.
Projektívnosťou (projektívnym zobrazením) sa nazýva zloženie konečného počtu perspektívností.
o určenosti projektívnosti). Nech
sú dve priamky v rozšírenej euklidovskej rovine a nech tri rôzne body priamky . Ďalej nech  tri rôzne body priamky . Potom existuje jediná projektívnosť
tri rôzne body priamky . Potom existuje jediná projektívnosť  \rightarrow R(q)") taká, že
taká, že  = A'") ,
,  = B'") ,
,  = C'") .
.Nech
je projektívna rovina a  je bijektívne zobrazenie
je bijektívne zobrazenie
 nazývame kolineáciou projektívnej roviny , ak každú trojicu kolineárnych bodov , ktoré sú po dvojiciach rôzne, zobrazí na trojicu , ktorá je takisto po dvojiciach rôzna a kolineárna.
nazývame kolineáciou projektívnej roviny , ak každú trojicu kolineárnych bodov , ktoré sú po dvojiciach rôzne, zobrazí na trojicu , ktorá je takisto po dvojiciach rôzna a kolineárna.Kolineácia projektívnej roviny, ktorej zúženie na ľubovoľnú priamku tejto roviny je projektívnosť, sa nazýva projektívna kolineácia.
Príklad. Každá stredová kolineácia (homológia, či elácia) desargovskej roviny je projektívnou kolineáciou, navyše
v rozšírenej euklidovskej rovine je každá kolineácia už projektívnou kolineáciou
- Bod sa nazýva samodružný bod kolineácie , ak
 = M") .
. - Priamka
 sa nazýva samodružná priamka kolineácie , ak
sa nazýva samodružná priamka kolineácie , ak  = m") .
. - Bod sa nazýva stredom (tiež silne samodružným bodom alebo priamkovo samodružným bodom) kolineácie , ak
 = S") a navyše pre každú priamku prechádzajúcu stredom .
a navyše pre každú priamku prechádzajúcu stredom . - Priamka
 sa nazýva osou (silne samodružnou priamkou alebo bodovo samodružnou priamkou) kolineácie , ak
sa nazýva osou (silne samodružnou priamkou alebo bodovo samodružnou priamkou) kolineácie , ak  = o") a
a  = X") pre každý bod priamky .
pre každý bod priamky . - Kolineácia, pre ktorú existuje stred (môže byť aj nevlastný), sa nazýva stredová kolineácia.
- Stredová kolineácia s nevlastným stredom, pre ktorú existuje os, sa nazýva osová kolineácia. Pozrite si príklad osovej afinity v nerozšírenom euklidovskom priestore Tu, ktorá je určená tromi nekolineárnymi bodmi a ich obrazmi.
Stredová kolineácia, ktorej stred neinciduje s osou, sa nazýva homológia , stredová kolineácia, ktorej stred s osou inciduje, sa nazýva elácia. Pre homológie používa aj názov perspektívna kolineácia (presnejšie pre homológie s vlastným stredom a vlastnou osou).
Nech
sú vrcholy štvorca v euklidovskej rovine, nech  . V rozšírenej euklidovskej rovine je týmito bodmi definovaná jediná projektívna kolineácia , ktorá zobrazí body po poriadku na body
. V rozšírenej euklidovskej rovine je týmito bodmi definovaná jediná projektívna kolineácia , ktorá zobrazí body po poriadku na body  . Je stredovou kolineáciou? Čo je jej zúžením na euklidovskú rovinu? (Ide o cyklické posunutie vrcholov štvorca.)
. Je stredovou kolineáciou? Čo je jej zúžením na euklidovskú rovinu? (Ide o cyklické posunutie vrcholov štvorca.)🔍 Je
stredová kolineácia?
- Nie. Stredová kolineácia (centrálna kolineácia) je projektívne zobrazenie, ktoré:
- Fixuje všetky body jednej priamky (tzv. os kolineácie),
- A všetky ostatné body sa zobrazujú pozdĺž lúčov z jedného bodu (tzv. stred kolineácie).
- V tomto prípade:
- Žiadny bod sa nezobrazuje na seba (ukážte, že je to pravda),
- Žiadna priamka nie je fixovaná,
- Zobrazenie cyklicky permutuje všetky štyri vrcholy štvorca.
- 👉 Preto nie je stredová kolineácia.
na euklidovskú rovinu? Zúžením projektívnej kolineácie na euklidovskú rovinu rozumieme jej pôsobenie len na vlastné body, teda bez nevlastných bodov.
- V tomto prípade:
- cyklicky posúva vrcholy štvorca: 𝐴↦𝐵↦𝐶↦𝐷↦𝐴
- To zodpovedá otočeniu štvorca o 90° okolo jeho stredu (v smere proti hodinovým ručičkám).
- 👉 Zúžením na euklidovskú rovinu je otočenie o 90° okolo stredu štvorca.
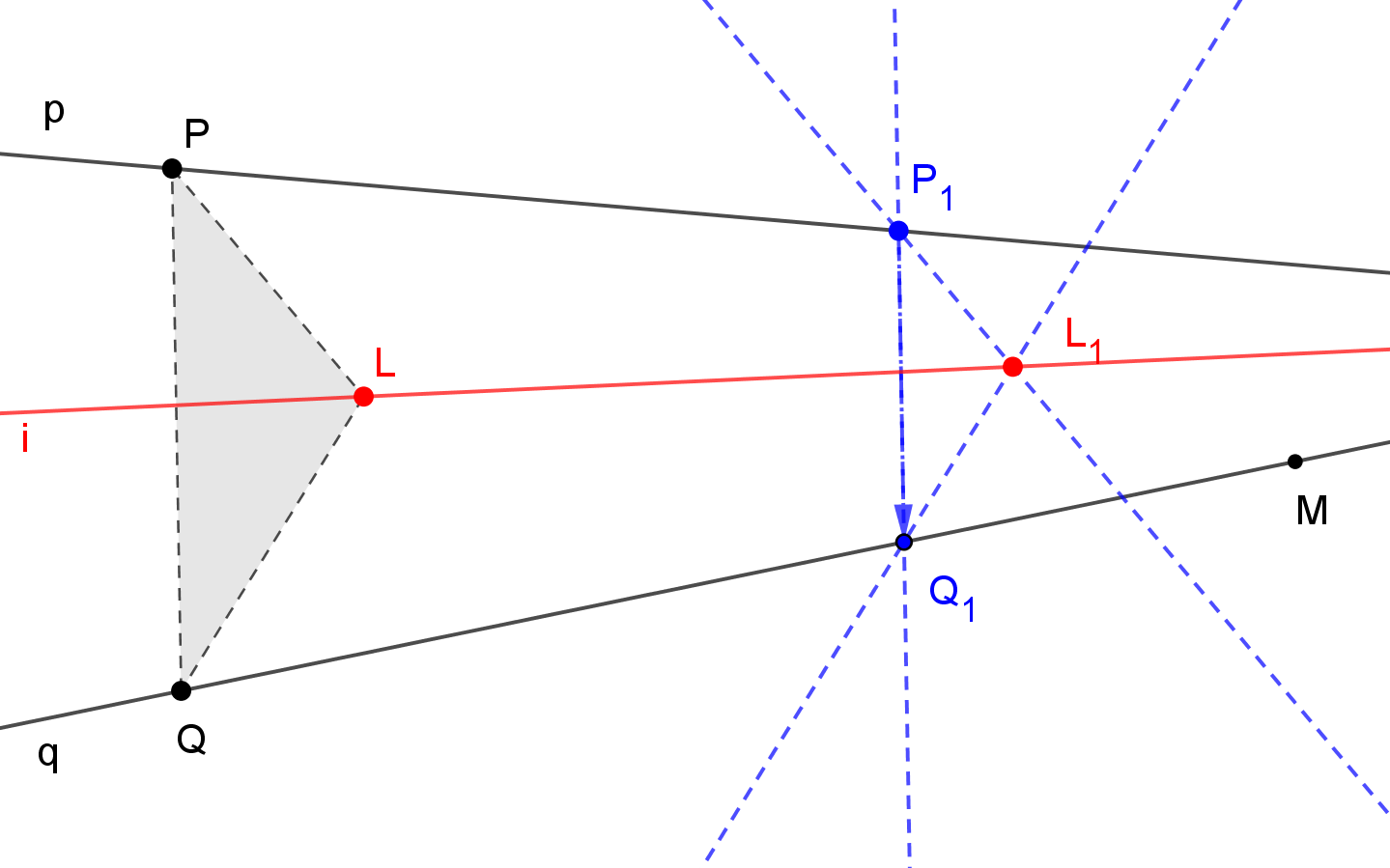
") , ktorá je určená stredom kolineácie, jej osou a dvojicou odpovedajúcich bodov . V takto definovanej perspektívnej kolineácii vieme zostrojiť obraz ľubovoľného bodu roviny
, ktorá je určená stredom kolineácie, jej osou a dvojicou odpovedajúcich bodov . V takto definovanej perspektívnej kolineácii vieme zostrojiť obraz ľubovoľného bodu roviny  , dokonca aj nevlastného (ideálneho bodu). do , priamku do priamky
, dokonca aj nevlastného (ideálneho bodu). do , priamku do priamky  . Nevlastný bod
. Nevlastný bod  (ideálny bod priamky ) do vlastného bodu
(ideálny bod priamky ) do vlastného bodu  . Pri konštrukcii (tu v rozšírenej euklidovskej rovine) sa využije fakt, že priamky prechádzajúce stredom sú samodružné, a teda body
. Pri konštrukcii (tu v rozšírenej euklidovskej rovine) sa využije fakt, že priamky prechádzajúce stredom sú samodružné, a teda body  a takisto body
a takisto body  sú kolineárne.
sú kolineárne.") v interaktívnom applete "Kolineácia - úbežnice".
v interaktívnom applete "Kolineácia - úbežnice".
V projektívnej rovine sú nasledujúce dva výroky ekvivalentné:
- Desarguesova veta .
- Pre každú trojicu troch rôznych kolineárnych bodov a priamku neprechádzajúcu žiadnym z daných bodov existuje (aspoň jedna) homológia
 taká, že je jej stred, jej os a pre obraz bodu platí
taká, že je jej stred, jej os a pre obraz bodu platí ") .
.
\)Matica kolineácie
definujeme zobrazenie (transformáciu) tejto projektívnej roviny  , ktoré bude zobrazovať body
, ktoré bude zobrazovať body  \in \overline{\mathbb{E}}_2") pomocou obrazov súradníc. Nech je regulárna matica stupňa 3. Potom obrazom bodu
pomocou obrazov súradníc. Nech je regulárna matica stupňa 3. Potom obrazom bodu  v zobrazení budeme rozumieť bod
v zobrazení budeme rozumieť bod  \in \overline{\mathbb{E}}_2") , pre ktorý platí:
, pre ktorý platí:
 \left(\begin{matrix} p_1 \\ p_2 \\ p_3 \end{matrix}\right)=\left(\begin{matrix} q_1 \\ q_2 \\ q_3 \end{matrix}\right)")
 je zobrazenie definované rovnosťou (*). Zobrazenie
je zobrazenie definované rovnosťou (*). Zobrazenie  má nasledovné vlastnosti
má nasledovné vlastnosti
- Ak
 \neq (0,0,0)") , tak aj
, tak aj  \neq (0,0,0)") .
.  =( \lambda q_1, \lambda q_2, \lambda q_3)=\lambda (q_1, q_2, q_3)") , trojici homogénnych súradníc bodu priradí trojicu homogénnych súradníc bodu
, trojici homogénnych súradníc bodu priradí trojicu homogénnych súradníc bodu  .
.- Lineárnu kombináciu usporiadaných trojíc zobrazí opäť na ich lineárnu kombináciu.
je analytickým vyjadrením kolineácie a daná kolineácia je určená maticou
")
Dané sú (po troch nekolineárne) body
 , ktorých homogénne súradnice sú
, ktorých homogénne súradnice sú , B = (1, 1, 0)") ,
, , D = (1, -1, 0)") . Nájdite rovnice kolineácie, ktorá zobrazí bod
. Nájdite rovnice kolineácie, ktorá zobrazí bod  na bod , na , na
na bod , na , na  a na .
a na .- Rovnice (a teda aj maticu) kolineácie
 budeme poznať, ak vypočítame koeficienty matice
budeme poznať, ak vypočítame koeficienty matice  zobrazenia small .
zobrazenia small . - Musí platiť
\rightarrow B = (1, 1, 0)") ,
, \rightarrow C = (1, 0, 1)") , ...
, ... - To odpovedá rovniciam
 + \lambda_k \cdot (1, 1, 0)=0") , ... , kde
, ... , kde ") je hľadaná matica a
je hľadaná matica a  sú násobky homogénnych súradníc odpovedajúcich bodov.
sú násobky homogénnych súradníc odpovedajúcich bodov. - Po roznásobení dostaneme 12 rovníc (4 dvojice odpovedajúcich bodov
 trojice súradníc) s 13-timi neznámymi
trojice súradníc) s 13-timi neznámymi  :
:

Matica tejto sústavy má tvar
")
Riešením je matica kolineácie
")
Urobte skúšku správnosti a vytvorte zodpovedajúci applet.
\)Výpočet matice
, osou a dvojicou odpovedajúcich bodov . - Zapíšte dané údaje v homogénnych súradniciach:
![\small P = [-3,2,1],\; Q = [5,-1,1],\; S = [3,1,1],\; A = [1,-1,1],\; A' = [0,-2,1]](https://lms.umb.sk/filter/tex/pix.php/b07eac2c6b6430c4ed3ff20f82d928ce.png "\small P = [-3,2,1],\; Q = [5,-1,1],\; S = [3,1,1],\; A = [1,-1,1],\; A' = [0,-2,1]") .
.
- Uvažujte všeobecnú projektívnu maticu kolineácie:

kde sú neznáme reálne čísla. Matica je určená až na skalárny násobok (projektívne).
sú neznáme reálne čísla. Matica je určená až na skalárny násobok (projektívne). - Využijeme podmienky kolineácie:
- body osi sú fixné: ,
- stred je vlastný: ,
- bod má obraz : .
znamená, že existuje skalár  , pre ktorý platí
, pre ktorý platí  . Táto rovnosť poskytuje tri nezávislé lineárne rovnice pre prvky matice a bod
. Táto rovnosť poskytuje tri nezávislé lineárne rovnice pre prvky matice a bod ![\small X[x,y,z]](https://lms.umb.sk/filter/tex/pix.php/3333d52b00cba357e7028fc77996ddcb.png "\small X[x,y,z]") .
. - body osi
- Dostaneme sústavu lineárnych rovníc: (pre každý bod 3 rovnice, spolu 12 rovníc)
Pre bod :
 Pre bod:
Pre bod:  Pre stred:
Pre stred:  Pre bod:
Pre bod: 
- Dostaneme 12 homogénnych lineárnych rovníc s 13 neznámymi. Sústavu sme vyriešili v GeoGebre pomocou vzhľadu CAS a dostali sme 1-parametrické riešenie (parameter
 ).
).


 Pozrite si riešenie Tu.
Pozrite si riešenie Tu.
- Výsledkom sú matice projektívne ekvivalentné
")
Riešenie je 1-parametrická rodina matíc!
V projektívnej geometrii parametre
 definujú iba tvar zobrazenia, nie jeho mierku/rozmery. Preto je miera voľnosti kladná a môžeme zvoliť hodnoty, ktoré sú výhodné. Naše riešenie pre
definujú iba tvar zobrazenia, nie jeho mierku/rozmery. Preto je miera voľnosti kladná a môžeme zvoliť hodnoty, ktoré sú výhodné. Naše riešenie pre  umožňuje jednoduché testovanie. Pre
umožňuje jednoduché testovanie. Pre  dáva "pekné/celé" čísla v matici.
dáva "pekné/celé" čísla v matici.Záver:
Získaná matica  určuje perspektívnu kolineáciu s daným stredom , osou a predpísanou zmenou bodu . Metóda využíva jednoduché lineárne podmienky a je analogická postupu určovania afinných zobrazení z korešpondencie bodov (simplexov).
určuje perspektívnu kolineáciu s daným stredom , osou a predpísanou zmenou bodu . Metóda využíva jednoduché lineárne podmienky a je analogická postupu určovania afinných zobrazení z korešpondencie bodov (simplexov).
- Nech
 sú štyri dvojice odpovedajúcich bodov také, že žiadne tri z bodov
sú štyri dvojice odpovedajúcich bodov také, že žiadne tri z bodov  a zároveň žiadne tri z bodov
a zároveň žiadne tri z bodov  nie sú kolineárne. Potom existuje kolineácia
nie sú kolineárne. Potom existuje kolineácia  , ktorá zobrazuje body na body . Teda existuje matica, ktorá reprezentuje kolineáciu .
, ktorá zobrazuje body na body . Teda existuje matica, ktorá reprezentuje kolineáciu . - Ľubovoľná regulárna matica typu
 reprezentuje nejakú projektívnu kolineáciu .
reprezentuje nejakú projektívnu kolineáciu .
Nájdite maticu
kolineácie, ktorá body s homogénnymi súradnicami , (-1, 1, 1), (4, 1, 1) , (5,0, 1)") zobrazí po rade na body
zobrazí po rade na body , (-2, 0, 1), (3, 0, 1) , (6, 1,1)") .
.Použite applet "Kolineácia 4 dvojice bodov", ktorý si otvoríte Tu. Využite postup konštrukcie a vytvorte si vlastný applet. Postup konštrukcie vo formáte PDF si stiahnete Tu
alebo príkazy CAS Tu. Váš výsledok porovnajte s našímTu.
\)Samodružné prvky
- Nech kolineácia
 je daná regulárnou maticou
Pripomíname, že kolineácia je v zmysle definície bijektívne zobrazenie projektívnej roviny.
je daná regulárnou maticou
Pripomíname, že kolineácia je v zmysle definície bijektívne zobrazenie projektívnej roviny..")
- Potom obraz bodu s homogénnymi súradnicami (\small (x, y, z)\) je bod
 s homogénnymi súradnicami
s homogénnymi súradnicami ") , pre ktoré platí
Ak tento vzťah napíšeme po zložkách, dostávame
, pre ktoré platí
Ak tento vzťah napíšeme po zložkách, dostávame Takto zapísané rovnice opisujú, ako sa obraz bodu v projektívnej rovine určí pomocou lineárnej transformácie reprezentovanej maticou
Takto zapísané rovnice opisujú, ako sa obraz bodu v projektívnej rovine určí pomocou lineárnej transformácie reprezentovanej maticou .
.
Bod
sa nazýva samodružným (invariantným) bodom kolineácie , ak je totožný so svojím obrazom v tejto kolineácii. Zhodne sa definuje samodružnosť priamky. je samodružným bodom kolineácie a nech má reprezentanta ") . Označme jeho obraz
. Označme jeho obraz ") , ktorý má reprezentanta
, ktorý má reprezentanta ") s nejakým
s nejakým  . Pre súradnice tohto samodružného bodu musí platiť
. Pre súradnice tohto samodružného bodu musí platiť
 je regulárna matica (1) kolineácie . Vzťah (4) (po vhodnej úprave) predstavuje sústavu homogénnych lineárnych rovníc
je regulárna matica (1) kolineácie . Vzťah (4) (po vhodnej úprave) predstavuje sústavu homogénnych lineárnych rovníc
x &\;+ &m_{12}y \quad &\;+ &m_{13}z=0 \\ m_{21}x &\;+ &(m_{22}-\lambda)y &\;+ &m_{23}z=0 \\ m_{31}x &\;+ &m_{32}y &\;+ &(m_{33}-\lambda) z=0 \end{aligned} \tag{4}")
X = 0.")
Determinant
=0") určuje charakteristický polynóm matice ; jeho korene sú vlastné čísla
určuje charakteristický polynóm matice ; jeho korene sú vlastné čísla  . Pre každé také riešime lineárnu sústavu Riešenie predstavuje vektor = súradnice samodružného bodu.
. Pre každé také riešime lineárnu sústavu Riešenie predstavuje vektor = súradnice samodružného bodu.Kolineácia
je zobrazenie roviny, ktoré zachováva kolineárnosť bodov, teda obraz priamky je opäť priamka. Nech je kolineácia daná maticou a nech  vyjadruje obraz bodu v homogénnych súradniciach. Ak bod
vyjadruje obraz bodu v homogénnych súradniciach. Ak bod ") leží na priamke
leží na priamke  , tak je splnená rovnosť
, tak je splnená rovnosť

") leží na obraze priamky
leží na obraze priamky

") výrazy z rovnice (2) a dostaneme:
výrazy z rovnice (2) a dostaneme:
 + b'(m_{21}x + m_{22}y + m_{23}z) + c'(m_{31}x + m_{32}y + m_{33}z) = 0.") vznikne rovnica:
vznikne rovnica:
x + (a' m_{12} + b' m_{22} + c' m_{32})y + (a' m_{13} + b' m_{23} + c' m_{33})z = 0. \tag{7}")
") odpovedajú koeficientom v stĺpcoch matice kolineácie .
odpovedajú koeficientom v stĺpcoch matice kolineácie . Porovnajme teraz túto rovnicu s pôvodnou rovnicou priamky
 a dostaneme sústavu rovníc
a dostaneme sústavu rovníc

 a zároveň platí
a zároveň platí =(\mu a',\mu b',\mu c')") . Koeficienty musia byť úmerné, teda rovnaké až na nenulový násobok
. Koeficienty musia byť úmerné, teda rovnaké až na nenulový násobok  . Po dosadení do sústavy (8) a prevedením tejto sústavy na homogénnu dostaneme
. Po dosadení do sústavy (8) a prevedením tejto sústavy na homogénnu dostaneme
a' + b' m_{21} + c' m_{31}=0, \\\\ m_{12}a' + (m_{22}-\mu)b' + c' m_{32}=0, \\\\ m_{13}a' + b' m_{23} + (m_{33}-\mu)c'=0. \tag{9} \end{cases} \end{equation}")
A' = 0:")
 \begin{pmatrix} a'\\ b'\\ c' \end{pmatrix} = \begin{pmatrix} 0\\ 0\\ 0 \end{pmatrix}. \tag{10}")
=0") určuje charakteristický polynóm matice
určuje charakteristický polynóm matice  . Jeho korene sú vlastné čísla . Pre každé také riešime lineárnu sústavu
. Jeho korene sú vlastné čísla . Pre každé také riešime lineárnu sústavu X = 0.") Riešenie predstavuje vektor = koeficienty samodružnej priamky. Vzťah (10) ukazuje, že priamky sa pri kolineácii transformujú transponovanou maticou , čo zabezpečuje zachovanie incidencie medzi bodmi a priamkami. Tento vzťah má rovnakú formu ako pri samodružných bodoch, len namiesto vlastných vektorov matice vystupujú vlastné kovektory matice . Pri priamkach ide o zachovanie incidencie a teda o použitie transpozície. \)
Riešenie predstavuje vektor = koeficienty samodružnej priamky. Vzťah (10) ukazuje, že priamky sa pri kolineácii transformujú transponovanou maticou , čo zabezpečuje zachovanie incidencie medzi bodmi a priamkami. Tento vzťah má rovnakú formu ako pri samodružných bodoch, len namiesto vlastných vektorov matice vystupujú vlastné kovektory matice . Pri priamkach ide o zachovanie incidencie a teda o použitie transpozície. \)Matica - ukážky
Daná je stredová kolineácia maticou
.") Geometrická interpretácia v GeoGebre (interaktívny applet) je dostupná na https://www.geogebra.org/m/zrf4kxxj. Určte obraz bodu , nájdite stred kolineácie a os kolineácie.
Geometrická interpretácia v GeoGebre (interaktívny applet) je dostupná na https://www.geogebra.org/m/zrf4kxxj. Určte obraz bodu , nájdite stred kolineácie a os kolineácie.- Zvoľte si ľubovoľný bod . Vytvorte pomocou vzhľadu "Tabuľka" (už je aktivovaná) 1-stĺpcovú maticu s názvom
 , ktorej prvky sú homogénne súradnice bodu .
, ktorej prvky sú homogénne súradnice bodu . - Vytvorte súčin
 .
. - Prvky matice
 sú homogénne súradnice obrazu
sú homogénne súradnice obrazu 
- Zobrazte bod pomocou vypočítaných súradníc.
- Pohybujte bodmi
 a pozorujte bod . Pokúste sa vytvoriť situáciu, aby bod bol stredom kolineácie resp. bodom osi kolineácie.
a pozorujte bod . Pokúste sa vytvoriť situáciu, aby bod bol stredom kolineácie resp. bodom osi kolineácie. - Podrobnejší postup riešenia (ale pre inú maticu!!!) je v PDF forme Tu.
- Samodružné prvky kolineácie
- Nájdeme a vyriešime charakteristickú rovnicu matice :
=\left|\begin{matrix}-\lambda-1 & 2 & 2 \\-2 & -\lambda+3 & 2 \\-2 & 2 & -\lambda+3\end{matrix}\right|=0=-λ^3+5λ^2-7λ+3=-(λ-1)(λ^2-4λ+3)=-(λ-1)(λ-1)(λ-3)=0")
- Riešením sú vlastné čísla: dvojnásobný koreň
 a jednoduchý koreň
a jednoduchý koreň  .
. - Pre každé
 nájdeme jeho vlastné vektory. Pre dvojnásobný koreň dostaneme
nájdeme jeho vlastné vektory. Pre dvojnásobný koreň dostaneme
= \left(\begin{matrix} 1 & -1 & -1 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \end{matrix}\right)") ,
,
odkiaľOdpoveď: Kolineácia má os kolineácie:

- Vlastnému číslu
 odpovedá matica
K nej odpovedajúca lineárna sústava
odpovedá matica
K nej odpovedajúca lineárna sústava.")
 dáva riešenie. Samodružný bod (stred kolineácie):
dáva riešenie. Samodružný bod (stred kolineácie):
") .
.
Daná je kolineácia
svojou maticou ") ,
,  =\left(\begin{matrix} 1 & 0 & 0 \\ 0 & 0 & -1 \\ 0 & 1 & 0 \end{matrix}\right)")
Nájdite samodružné body zobrazenia
.Ak
") je samodružný bod, jeho súradnice spĺňajú maticovú rovnicu
je samodružný bod, jeho súradnice spĺňajú maticovú rovnicu \times \left(\begin{matrix} x_1 \\ x_2 \\ x_3 \end{matrix}\right)=\lambda\left(\begin{matrix} x_1 \\ x_2 \\ x_3 \end{matrix}\right)")
alebo sústavu lineárnych rovníc
 .
. Matica tejto sústavy rovníc je
")
a sústava má nenulový koreň, ak pre jej determinant platí
 . Z toho dostaneme
. Z toho dostaneme (1-\lambda)=0") . Po dosadení jediného (reálneho) riešenia
. Po dosadení jediného (reálneho) riešenia  do vyššie uvedenej sústavy rovníc dostaneme
do vyššie uvedenej sústavy rovníc dostaneme  . Z toho vyplýva
. Z toho vyplýva  a
a  je ľubovoľné. Riešením je trojica
je ľubovoľné. Riešením je trojica ") a všetky jej nenulové násobky, teda bod s homogénnymi súradnicami (nevlastný bod). Otvorte si applet "Matica - ukazky_Prikl1" a nastavte súradnice bodu
a všetky jej nenulové násobky, teda bod s homogénnymi súradnicami (nevlastný bod). Otvorte si applet "Matica - ukazky_Prikl1" a nastavte súradnice bodu  na hodnoty . Ukážte, že táto kolineácia nie je stredovou kolineáciou.
na hodnoty . Ukážte, že táto kolineácia nie je stredovou kolineáciou.Ukážky "pekných" matíc kolineácií. V pracovnom applete "Kolineacia ..." zmeňte prvky matice podľa priloženej tabuľky "Kolineácie - matice" pre každý zo 4 prípadov. Určte základné prvky kolineácie (stred, os, úbežnice) ak existujú. Applet "Kolineacia_Matica_ObrazBodu(PrikStredova)".
 & x + y = 1 & \begin{pmatrix} 1 & 0 & 1 \\ 0 & 1 & 1 \\ 0 & 0 & 2 \end{pmatrix} \\ \hline 2 & (1,1) & x−y=0 & \begin{pmatrix} 3 & 0 & -2 \\ 0 & 3 & -2 \\ 0 & 0 & 1 \end{pmatrix} \\ \hline \end{array}")
Tabuľka: Kolineácie - matice.
\)Cvičenie
- Nech sú vrcholy štvorca v euklidovskej rovine, nech
 . V rozšírenej euklidovskej rovine je týmito bodmi definovaná jediná projektívna kolineácia , ktorá zobrazí body po poriadku na body . Je stredovou kolineáciou? Čo je jej zúžením na euklidovskú rovinu?
. V rozšírenej euklidovskej rovine je týmito bodmi definovaná jediná projektívna kolineácia , ktorá zobrazí body po poriadku na body . Je stredovou kolineáciou? Čo je jej zúžením na euklidovskú rovinu? - Kolineácia je určená 4 odpovedajúcich si bodov.
- Nájdite maticu kolineácie, ktorá body s homogénnymi súradnicami
, (0, 1, 0), (0, 0, 1) , (1, 1, 1)") zobrazí po rade na body
zobrazí po rade na body , (1, 2, 1), (1, 2, 2) , (4, 5, 4)") .
.
Pomoc.
Použite applet "Kolineácia 4 dvojice bodov" - dostupný Tu. GeoGebra verzia appletu si otvoríte Tu.
Porovnajte vaše riešenie s naším riešením, ktoré si otvoríte Tu. resp. riešenie s testovacím bodom Tu
Tu - Dané sú (po troch nekolineárne) body , ktorých homogénne súradnice sú , .
- Nájdite rovnice kolineácie, ktorá zobrazí bod na bod , na , na a na . Riešenie Tu.
- Nájdite rovnice kolineácie, ktorá zobrazí bod na bod , na a body sú samodružnými bodmi tejto kolineácie.
- Nájdite rovnice kolineácie, ktorá zobrazí bod na bod
") , bod na bod
, bod na bod ") ), a pre ktorú nevlastné body osí
), a pre ktorú nevlastné body osí  a
a  sú samodružnými bodmi.
sú samodružnými bodmi.
- Nájdite rovnice kolineácie, ktorá zobrazí bod
- Nájdite maticu
- Kolineácia je určená odpovedajúcou maticou.
- Kolineácia je daná maticami uvedenými v tabuľke. Vytvorte applet ako geometrickú interpretáciu v GeoGebre (interaktívny applet). Určte obraz ľubovoľného bodu , nájdite stred kolineácie, os kolineácie, prípadne úbežnicu (ak existujú).

- Kolineácia je určená maticou
") . Nájdite obraz dynamického bodu
. Nájdite obraz dynamického bodu ") ako vektor
ako vektor  . Zadanie otvoríte Tu.
. Zadanie otvoríte Tu.
a) Určite jeho karteziánske súradnice.
b) Zistite, či táto kolineácia je stredová (či existuje stred a os kolineácie). - Zostrojte obraz trojuholníka (projektívne súradnice jeho vrcholov) v kolineácii "ObrazTrojuh(GMB)" pomocou nástroja "Množina bodov". Zostrojte obraz opísanej kružnice tomuto trojuholníku.
- Daná kolineácia je určená maticou
") . Nájdite obraz nevlastného bodu
. Nájdite obraz nevlastného bodu ") . Použite vzorový applet "Matica_Cvic a(ObrazNevlastny)".
. Použite vzorový applet "Matica_Cvic a(ObrazNevlastny)".
Zapnite stopu obrazu bodu a pohybujte/zmeňte polohu bodu , dostanete úbežnicu 2. druhu. Nájdite úbežnicu 1. druhu. - Pomocou AI nájdite matice ďalších "pekných" stredových kolineácií, ktoré majú "pekné súradnice" odpovedajúcich bodov "vzor — obraz". Ku každej matici vytvorte samostatný dynamický applet.
- Kolineácia je daná maticami uvedenými v tabuľke. Vytvorte applet ako geometrickú interpretáciu v GeoGebre (interaktívny applet). Určte obraz ľubovoľného bodu
- Vypracujte odpovede! Daný je pracovný list, ktorý si stiahnite Tu.
\)Kužeľosečky
V tejto kapitole uvedieme ďalšie možné zavedenie pojmu kužeľosečka.
- Metrickú definíciu kužeľosečky ako množina bodov danej vlastnosti.
- Projektívnu definíciu kužeľosečky ako množinu priesečníkov dvoch zväzkov priamok.
- Kužeľosečka ako rovinný rez rotačnej kužeľovej plochy ( Quételet-Dandelin veta).
Nech
 je daný bod nazývaný ohnisko, nech
je daný bod nazývaný ohnisko, nech  je daná priamka nazývaná riadiaca priamka (angl. directrix) a nech
je daná priamka nazývaná riadiaca priamka (angl. directrix) a nech  je dané kladné reálne číslo nazývané číselná excentricita (tiež numerická výstrednosť). Potom kužeľosečka je množina všetkých bodov
je dané kladné reálne číslo nazývané číselná excentricita (tiež numerická výstrednosť). Potom kužeľosečka je množina všetkých bodov  , ktoré spĺňajú vzťah:
, ktoré spĺňajú vzťah:
}{\rho(X, d)} = k,")
") je euklidovská vzdialenosť bodov
je euklidovská vzdialenosť bodov  a
a  a
a ") je vzdialenosť bodu od priamky .
je vzdialenosť bodu od priamky .Otvorte súbor Tu.
\)Projektívna definícia
Nech
![\small [P],[Q]](https://lms.umb.sk/filter/tex/pix.php/eb0dec0d6e2722bf6985a4ac91ee3f98.png "\small [P],[Q]") sú dva zväzky priamok so stredmi
sú dva zväzky priamok so stredmi  . Zobrazenie
. Zobrazenie
![\small \rho : [P] \rightarrow [Q]](https://lms.umb.sk/filter/tex/pix.php/fbd5fb6bc33ca69111a4d133c29d01b1.png "\small \rho : [P] \rightarrow [Q]") , ak existuje priamková rada bodov (množina bodov na priamke)
, ak existuje priamková rada bodov (množina bodov na priamke) ![\small [o]=\left\{A,B,C \right\}](https://lms.umb.sk/filter/tex/pix.php/3657d0f46ec7b6c313adf4c54f666526.png "\small [o]=\left\{A,B,C \right\}") , ktorá neprechádza stredmi zväzkov , taká, že zobrazenie
, ktorá neprechádza stredmi zväzkov , taká, že zobrazenie  je zložením dvoch perspektívností tejto priamkovej rady na zväzky . Priamkovú radu bodov
je zložením dvoch perspektívností tejto priamkovej rady na zväzky . Priamkovú radu bodov ![\small [o]](https://lms.umb.sk/filter/tex/pix.php/60661f3934366d09fd29e639cfb8c63f.png "\small [o]") nazývame osou perspektivity zväzkov a zobrazenie - perspektívnosť značíme:
nazývame osou perspektivity zväzkov a zobrazenie - perspektívnosť značíme:
![\small \rho : [P] \overset{o}{\longrightarrow} [Q].](https://lms.umb.sk/filter/tex/pix.php/09885d1dd760f164ac4dc6821ca5a434.png "\small \rho : [P] \overset{o}{\longrightarrow} [Q].")
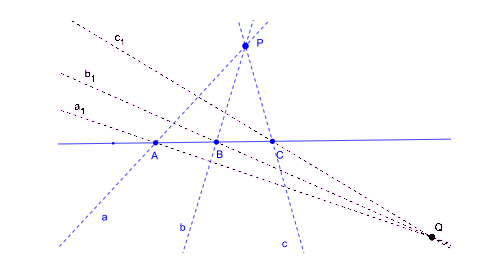
Perspektívne zväzky priamok.
Nech
sú dva rôzne body roviny  , a nech
, a nech ") ,
, ") sú zväzky priamok so stredmi . Nech
sú zväzky priamok so stredmi . Nech  \rightarrow Z(Q)") je projektívnosť medzi týmito zväzkami. Kužeľosečkou
je projektívnosť medzi týmito zväzkami. Kužeľosečkou  nazývame množinu všetkých bodov , ktoré ležia súčasne na priamke
nazývame množinu všetkých bodov , ktoré ležia súčasne na priamke ") a na jej obraze
a na jej obraze  \in Z(Q)") :
:
 \mid m \in Z(P) \}.") \)
\)Rez kužeľovej plochy
- Už **Menaichmos** (4. storočie pred n. l.) skúmal rezy rotačného kužeľa pri hľadaní riešení problémov duplikácie kocky. **Apollónios z Pergy** potom v diele \textit{Konika} (3. storočie pred n. l.) systematicky popísal vlastnosti kužeľosečiek a zaviedol dnešné názvy elipsa, parabola a hyperbola.
- V novoveku **Lambert Quételet (1796–1874)** a **Germinal Pierre Dandelin (1794–1847)** dokázali, že kužeľosečka ako rez rotačného kužeľa je ekvivalentná s metrickou definíciou pomocou ohnísk a riadiacich priamok. Ich veta o dotykových guliach (\textit{Dandelin spheres}) je dnes štandardným mostom medzi priestorovou a rovinnou definíciou kužeľosečiek.
Nech je daná rotačná kužeľová plocha a rovina rezu, ktorá neprechádza jeho vrcholom
 . Nech sú
. Nech sú  gule (Dandelinove gule) vpísané do rotačnej kužeľovej plochy tak, že sa dotýkajú roviny rezu v bodoch
gule (Dandelinove gule) vpísané do rotačnej kužeľovej plochy tak, že sa dotýkajú roviny rezu v bodoch  a
a  .
. Potom krivka prieniku rotačnej kužeľovej plochy a roviny rezu je kužeľosečka s ohniskami
a , pričom ohniská kužeľosečky sú dotykové body gúľ s rovinou rezu.\)Analytické vyjadrenie kužeľosečiek
}{\rho(X, d)} = k.\tag{1}")
 prechádzala bodom
prechádzala bodom ![\small F[f; 0]](https://lms.umb.sk/filter/tex/pix.php/2ecf2d2536fa68eb69afbd79cfc8d733.png "\small F[f; 0]") a bola kolmá na priamku s rovnicou
a bola kolmá na priamku s rovnicou  . Nech
. Nech ![\small X[x,y]](https://lms.umb.sk/filter/tex/pix.php/3bee1ec8d3fdf077444ea183de454b36.png "\small X[x,y]") je ľubovoľný bod kužeľosečky. Pri takto zvolenej KSS bude pre
je ľubovoľný bod kužeľosečky. Pri takto zvolenej KSS bude pre 
\begin{equation} d : x = c,\quad F[f; 0] ,\quad f = c + p.\tag{2} \end{equation} Bod
 budeme nazývať ohnisko, priamku riadiaca priamka a číslo
budeme nazývať ohnisko, priamku riadiaca priamka a číslo  numerická excentricita resp. numerická výstrednosť kužeľosečky. Vzdialenosť ohniska od riadiacej priamky nazveme parameter kužeľosečky.
numerická excentricita resp. numerická výstrednosť kužeľosečky. Vzdialenosť ohniska od riadiacej priamky nazveme parameter kužeľosečky. Vzdialenosť ohniska od stredu kužeľosečky označíme
 a nazveme lineárna excentricita alebo krátko excentricita elipsy. Pozri obrázok, ktorý predstavuje elipsu s numerickou výstrednosťou
a nazveme lineárna excentricita alebo krátko excentricita elipsy. Pozri obrázok, ktorý predstavuje elipsu s numerickou výstrednosťou  .
.
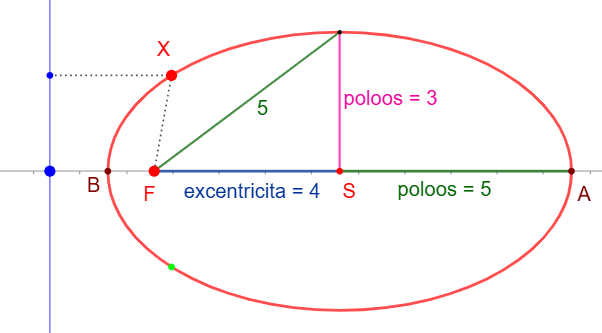
^2 + y^2}}{|x-c|} = k.") Umocnením a úpravou dostaneme
Umocnením a úpravou dostaneme
^2 + y^2 = k^2 (x-c)^2.")
-2(f-k^2c)x+y^2+f^2-k^2c^2=0 .") . Konkrétne pre
. Konkrétne pre  kužeľosečka je elipsa, pre
kužeľosečka je elipsa, pre  je parabola a pre
je parabola a pre  je hyperbola.\)
je hyperbola.\)Elipsa - parametre
alebo . Elipsa
Štandardná rovnica elipsy so stredom v počiatku a veľkou poloosou
 na osi má tvar
na osi má tvar

Dokážte, že pre elipsu v štandardnom tvare ohniská majú súradnice:
,F_2(e,0)") a zároveň platí:
a zároveň platí:
 je vzdialenosť ohniska od stredu, ktorú nazveme lineárna excentricita elipsy alebo krátko excentricita elipsy.. Zovšeobecnenie na ľubovoľnú hodnotu prenechávame na čitateľa. Nech kužeľosečka (elipsa) je definovaná metrickou podmienkou
je vzdialenosť ohniska od stredu, ktorú nazveme lineárna excentricita elipsy alebo krátko excentricita elipsy.. Zovšeobecnenie na ľubovoľnú hodnotu prenechávame na čitateľa. Nech kužeľosečka (elipsa) je definovaná metrickou podmienkou
") a vrcholy elipsy boli v súmerne položených bodoch
a vrcholy elipsy boli v súmerne položených bodoch , B(-a,0)") . Symbolom si zatiaľ označíme ako poloos veľkej osi (tak, aby vrchol elipsy na pravej strane mal súradnice
. Symbolom si zatiaľ označíme ako poloos veľkej osi (tak, aby vrchol elipsy na pravej strane mal súradnice ") ). Takáto voľba je možná lebo elipsa je stredovo súmerný útvar. Pozri obrázok nižšie.
). Takáto voľba je možná lebo elipsa je stredovo súmerný útvar. Pozri obrázok nižšie. Po dosadení súradníc ohniska a vrcholov do vzťahu (1) dostaneme dve rovnice
 označuje hľadanú súradnicu riadiacej priamky
označuje hľadanú súradnicu riadiacej priamky  . Riešenie tejto sústavy určuje riadiacu priamku, ktorá bude mať rovnicu
. Riešenie tejto sústavy určuje riadiacu priamku, ktorá bude mať rovnicu  a zrejme je vertikálna na os .
a zrejme je vertikálna na os .
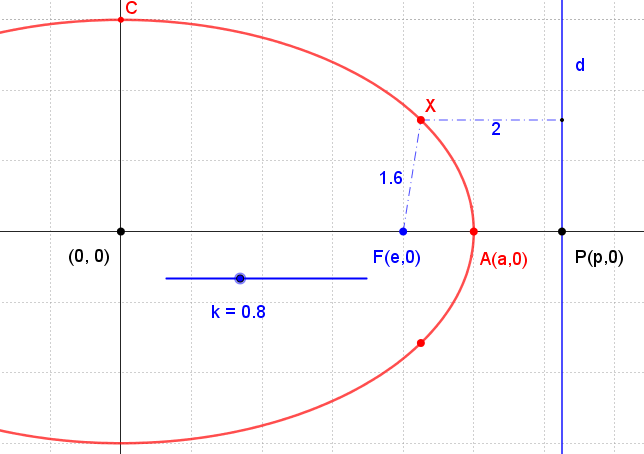
Elipsa v štandardnom tvare
") leží na kužeľosečke. Potom podľa metrickej definície platí
leží na kužeľosečke. Potom podľa metrickej definície platí
^2+y^2}=k\left|x-\frac{a}{k}\right|.\tag{2}")
 , môžeme absolútnu hodnotu vyjadriť explicitne; pri nasledujúcich algebraických úpravách pracujeme s pozitívnymi stranami, takže po umocnení a vhodnej ekvivalentnej úprave dostaneme
, môžeme absolútnu hodnotu vyjadriť explicitne; pri nasledujúcich algebraických úpravách pracujeme s pozitívnymi stranami, takže po umocnení a vhodnej ekvivalentnej úprave dostaneme
x^2 + (-2e + 2ak)x + (e^2 - a^2 + y^2)=0. \tag{3}")
") leží na kužeľosečke. Dosadíme
leží na kužeľosečke. Dosadíme  do metrickej podmienky (2) a dostaneme:
do metrickej podmienky (2) a dostaneme:
^2} = k\Bigl|\;a-\frac{a}{k}\;\Bigr|.")
 . Pre elipsu platí
. Pre elipsu platí  a pravá strana sa rovná
a pravá strana sa rovná =a-ak.") Dostávame rovnosť
Dostávame rovnosť

 . Po dosadení
. Po dosadení  sa (2) zjednoduší na
sa (2) zjednoduší na
x^2 + (e^2 - a^2) + y^2 = 0.")
x^2 + y^2 = a^2 - e^2.")
 (lebo \(\small 0 \[ b^2 := a^2(1-k^2) = a^2 - a^2k^2. \] Keďže podľa (2) platí , máme
(lebo \(\small 0 \[ b^2 := a^2(1-k^2) = a^2 - a^2k^2. \] Keďže podľa (2) platí , máme  , teda
, teda


 vyplýva (pre pomenovanie
vyplýva (pre pomenovanie  ako lineárnej excentricity) požadovaný vzťah
ako lineárnej excentricity) požadovaný vzťah

Kľúčovým momentom dôkazu bolo dosadenie súradníc vrcholu
, čo nám umožnilo bez dodatočného predpokladu vyjadriť pomocou a (vzťah  ). Tento krok je legitímny, lebo sme zaviedli ako absolútnu hodnotu -súradnice pravého vrcholu elipsy (teda ako hodnotu, ktorá skutočne patrí elipse), a preto jej súradnice musia spĺňať metrickú definíciu. Rovnosť (4) by sme mohli odvodiť aj dosadením súradníc vedľajšieho vrcholu elipsy
). Tento krok je legitímny, lebo sme zaviedli ako absolútnu hodnotu -súradnice pravého vrcholu elipsy (teda ako hodnotu, ktorá skutočne patrí elipse), a preto jej súradnice musia spĺňať metrickú definíciu. Rovnosť (4) by sme mohli odvodiť aj dosadením súradníc vedľajšieho vrcholu elipsy .")
V elipse existujú dve rôzne ohniská
 , pričom súčet vzdialeností ľubovoľného bodu elipsy od oboch ohnísk je konštantný a rovný dvojnásobku hlavnej poloosi
, pričom súčet vzdialeností ľubovoľného bodu elipsy od oboch ohnísk je konštantný a rovný dvojnásobku hlavnej poloosi  . \begin{equation} \left|F_1X \right| +\left|F_2X \right| =2a \end{equation}
. \begin{equation} \left|F_1X \right| +\left|F_2X \right| =2a \end{equation}Ak stred elipsy je bod
![\small S[m; n]](https://lms.umb.sk/filter/tex/pix.php/47e4e2e9694bb756dcf4ecffce23590c.png "\small S[m; n]") a ohniská ležia na rovnobežke s osou x prechádzajúcou bodom , potom stredová rovnica elipsy je daná vzťahom: \begin{equation} \frac{(x - m)^2}{a^2} + \frac{(y - n)^2}{b^2} = 1 \tag{5} \end{equation}\)
a ohniská ležia na rovnobežke s osou x prechádzajúcou bodom , potom stredová rovnica elipsy je daná vzťahom: \begin{equation} \frac{(x - m)^2}{a^2} + \frac{(y - n)^2}{b^2} = 1 \tag{5} \end{equation}\)Parabola a hyperbola
- Parabola
- Štandardná rovnica paraboly s osou rovnobežnou s osou
 je
kde
je
kde
 je parameter paraboly (vzdialenosť ohniska od vrcholu). Ohnisko má súradnice
je parameter paraboly (vzdialenosť ohniska od vrcholu). Ohnisko má súradnice ") a riadiaca priamka má rovnicu:
a riadiaca priamka má rovnicu:  . Excentricita musí byť rovná 1:
. Excentricita musí byť rovná 1:  . Po dosadení súradníc ohniska paraboly dostaneme rovnicu
. Po dosadení súradníc ohniska paraboly dostaneme rovnicu
 ^2 + y^2} = x + \frac{p}{2}. \label{eq:parabola1} \end{equation}")
- Ak vrchol paraboly je bod
![\small V[m; n]](https://lms.umb.sk/filter/tex/pix.php/93f874463c3d5833db3eda989410197b.png "\small V[m; n]") a ohnisko leží na rovnobežke s osou prechádzajúcou bodom , potom vrcholová rovnica paraboly: \begin{equation} (y-n)^2 = 2p(x-m). \label{eq:parabolastred} \end{equation}
a ohnisko leží na rovnobežke s osou prechádzajúcou bodom , potom vrcholová rovnica paraboly: \begin{equation} (y-n)^2 = 2p(x-m). \label{eq:parabolastred} \end{equation}
- Štandardná rovnica paraboly s osou rovnobežnou s osou
- Hyperbola
- Štandardná rovnica hyperboly s centrom v počiatku a reálnou osou na osi je \begin{equation} \frac{x^2}{a^2} - \frac{y^2}{b^2} = 1, \quad a,b > 0. \end{equation} Pre jej parametre platí:

- Ohniská:
, F_2(e,0)") . Riadiace priamky:
. Riadiace priamky:  \
Veta.
\
Veta.
Rozdiel vzdialeností ľubovoľného bodu hyperboly od ohnísk je stály a rovný , pričom konštanta je menšia ako vzdialenosť ohnísk.
, pričom konštanta je menšia ako vzdialenosť ohnísk. - Podobne ako v časti Elipsa ľahko ukážeme, že stredová rovnica hyperboly má tvar \begin{equation} \frac{(x-m)^2}{a^2} - \frac{(y-n)^2}{b^2} = 1. \label{eq:hyperbolastred} \end{equation}
- Štandardná rovnica hyperboly s centrom v počiatku a reálnou osou na osi
\)Kategorizácia kužeľosečiek
 , pričom aspoň jeden z koeficientov
, pričom aspoň jeden z koeficientov  je nenulový.
je nenulový.
Pod regulárnou kužeľosečkou rozumieme kružnicu, elipsu, hyperbolu alebo parabolu. Pod singulárnou kužeľosečkou rozumieme každú dvojicu priamok (dve rôznobežné priamky, dve rôzne rovnobežné priamky) alebo bod.
 \cdot \sigma \cdot \begin{pmatrix} x \\ y \\ 1 \end{pmatrix} = 0,")
 pozostáva z koeficientov všeobecnej rovnice. Algebraickými úpravami môžeme ukázať, že matica má tvar
pozostáva z koeficientov všeobecnej rovnice. Algebraickými úpravami môžeme ukázať, že matica má tvar
 nazývame veľký diskriminant kužeľosečky.
nazývame veľký diskriminant kužeľosečky. Malý diskriminant kužeľosečky je determinant matice:

Pri prechode do projektívnej roviny
, vyjadríme rovnicu (1) v homogénnych súradniciach ") . Zavedieme substitúciu:
. Zavedieme substitúciu:  Vynásobíme celú rovnicu
Vynásobíme celú rovnicu  a získame: \begin{equation} Ax^2 + 2Bxy + Cy^2 + 2Dxz + 2Eyz + Fz^2 = 0 \end{equation} To je homogenizovaná rovnica kužeľosečky v projektívnej rovine . Túto rovnicu môžeme zapísať pomocou kvadratickej formy: \begin{equation} \label{eq:proj} \mathbf{x}^\top \sigma \; \mathbf{x} = 0, \quad \text{kde } \mathbf{x} = \begin{pmatrix} x \\ y \\ z \end{pmatrix} \end{equation}
a získame: \begin{equation} Ax^2 + 2Bxy + Cy^2 + 2Dxz + 2Eyz + Fz^2 = 0 \end{equation} To je homogenizovaná rovnica kužeľosečky v projektívnej rovine . Túto rovnicu môžeme zapísať pomocou kvadratickej formy: \begin{equation} \label{eq:proj} \mathbf{x}^\top \sigma \; \mathbf{x} = 0, \quad \text{kde } \mathbf{x} = \begin{pmatrix} x \\ y \\ z \end{pmatrix} \end{equation}  ) a malého diskriminantu (označenie
) a malého diskriminantu (označenie  ) sme zostavili kvôli prehľadnosti nasledujúci algoritmus:
) sme zostavili kvôli prehľadnosti nasledujúci algoritmus: - Ak veľký diskriminant je rôzny od nuly
") , tak kužeľosečka je regulárna a pre
, tak kužeľosečka je regulárna a pre

 alebo
alebo  ⇒ elipsa
⇒ elipsa alebo
alebo  ⇒ prázdna množina
⇒ prázdna množina
 ⇒ parabola
⇒ parabola ⇒ hyperbola
⇒ hyperbola
- Ak veľký diskriminant je rovný nule
") , tak kužeľosečka je singulárna a pre
, tak kužeľosečka je singulárna a pre
 ⇒ kužeľosečka je singulárnym bodom
⇒ kužeľosečka je singulárnym bodom ⇒ sú to rovnobežky alebo prázdna množina, špeciálne ak
⇒ sú to rovnobežky alebo prázdna množina, špeciálne ak
- Označme
 , potom pre
, potom pre  môžu nastať prípady:
môžu nastať prípady:
 dve rôzne rovnobežky
dve rôzne rovnobežky dve totožné rovnobežky
dve totožné rovnobežky prázdna množina
prázdna množina
- Označme
 , potom pre
, potom pre  môžu nastať prípady:
môžu nastať prípady:
 dve rôzne rovnobežky
dve rôzne rovnobežky ⇒ dve totožné rovnobežky
⇒ dve totožné rovnobežky ⇒ prázdna množina
⇒ prázdna množina
- Označme
 singulárna kužeľosečka predstavuje dve rôznobežky
singulárna kužeľosečka predstavuje dve rôznobežky
 kvadratickej formy (\ref{eq:generalquad}), ktorý sa určí ako:
kvadratickej formy (\ref{eq:generalquad}), ktorý sa určí ako:  Tento spôsob triedenia je vhodný len pre regulárne kužeľosečky.
Tento spôsob triedenia je vhodný len pre regulárne kužeľosečky. Podľa hodnoty diskriminantu
rozlišujeme tri prípady:
 : elipsa (vrátane kružnice, ak
: elipsa (vrátane kružnice, ak  ),
), : parabola,
: parabola, : hyperbola.
: hyperbola.
Diskriminant
 kvadratickej formy (\ref{eq:generalquad}) je spoľahlivým a štandardným kritériom na klasifikáciu kvadratických kriviek. Pri zavádzaní tejto klasifikácie je vhodné ukázať nielen analytickú interpretáciu, ale aj grafickú vizualizáciu — napríklad pomocou parametrov
kvadratickej formy (\ref{eq:generalquad}) je spoľahlivým a štandardným kritériom na klasifikáciu kvadratických kriviek. Pri zavádzaní tejto klasifikácie je vhodné ukázať nielen analytickú interpretáciu, ale aj grafickú vizualizáciu — napríklad pomocou parametrov  meniť typ kužeľosečky v reálnom čase.
meniť typ kužeľosečky v reálnom čase.Rozhodnite, o aký typ kužeľosečky ide v nasledujúcich prípadoch:
 →
→  → kružnica (elipsa),
→ kružnica (elipsa), →
→  = 4") → hyperbola
→ hyperbola →
→  → parabola
→ parabola
\)Transformácie
Otvorte si prezentáciu Tu.
Cvičenie
Identifikácia a klasifikácia kužeľosečiek
- Určte typ kužeľosečky a jej základné vlastnosti pomocou veľkého a malého diskriminantu:
- Rozhodnite, či sú nasledujúce kužeľosečky regulárne alebo singulárne:
- Kužeľosečka je daná rovnicou:

- Vypočítajte diskriminant kvadratickej formy a určte typ kužeľosečky.
- Nájdite jej stred.
- Rozhodnite o polohe kužeľosečky vzhľadom na súradnicovú sústavu:

Určte stred a polomer kužeľosečky, ak ide o kružnicu. - Pre ktoré hodnoty parametra je rovnica

- elipsa,
- parabola,
- hyperbola?
- Určte typ kužeľosečky a jej stred:

- Rozhodnite, či je kužeľosečka daná rovnicou

degenerovaná. Ak áno, určte typ degenerácie. - Vyhľadajte v zbierke Kopka–Tichý: Analytická geometrie príklad s podobnou úlohou a vyriešte ho.






Transformácia na štandardný tvar a výpočty parametrov
- Transformujte na štandardný tvar a určte parametre kužeľosečky:

- Preveďte na štandardný tvar:

Nájdite stred, osi a dĺžky poloosí. - Elipsa je daná rovnicou:

- Určte súradnice stredu elipsy.
- Transformujte rovnicu na štandardný tvar.
- Transformujte nasledujúcu rovnicu hyperboly a určte asymptoty:

- Určte štandardný tvar paraboly:

a vypočítajte súradnice ohniska a rovnicu riadiacej priamky. - Transformujte rovnicu na štandardný tvar a určte excentricitu:

- Vypočítajte uhol otočenia súradnicovej sústavy, ktorým odstránite zmiešaný člen z rovnice kužeľosečky:

- Transformujte na štandardný tvar a určte typ kužeľosečky:

- Zistite, či je nasledujúca rovnica regulárna alebo singulárna a upravte ju na štandardný tvar:

- Zo zbierky Effa–Novotný: Úlohy z analytickej geometrie vyberte úlohu na transformáciu kužeľosečky so zmiešaným členom a riešte ju podľa postupu z prednášky.
\)