Afinná geometria - zobrazenia, vizualizácie, aplikácie
| Site: | Virtuálna Univerzita Mateja Bela |
| Course: | Interaktívna geomeria |
| Book: | Afinná geometria - zobrazenia, vizualizácie, aplikácie |
| Printed by: | Hosťovský používateľ |
| Date: | Wednesday, 29 July 2026, 3:31 PM |
 |
Univerzita Mateja Bela Fakulta prírodných vied |
|---|
Afinná geometria v analytickom a didaktickom kontexte
Zobrazenia, vizualizácie, aplikácie
Zobrazenia, vizualizácie, aplikácie
Pavol Hanzel, Patrik Voštinár

Banská Bystrica 2025
 \)
\)AFINNÁ GEOMETRIA - ZOBRAZENIA
Učebnica vznikla v rámci projektu KEGA 010TTU-4/2025 "Rozvoj informatického a algoritmického myslenia žiakov prostredníctvom efektívneho začlenenia moderných technológií do vyučovania informatiky a matematiky"
© Autori:
prof. RNDr. Pavol Hanzel, CSc.,
doc. PaedDr. Patrik Voštinár, PhD.
Recenzenti:
doc. RNDr. Tomáš Zdráhal, CSc.
doc. PaedDr. Milan Pokorný, PhD.
Vydavateľ:
© Belianum. Vydavateľstvo Univerzity Mateja Bela v Banskej Bystrici.
Edícia: Fakulta prírodných vied
Prvé vydanie, 2025.
Schválila Edičná komisia FPV UMB v Banskej Bystrici ako vysokoškolskú učebnicu. Rukopis neprešiel jazykovou úpravou.
ISBN ..., (online: iPDF)
EAN ...
© Autori:
prof. RNDr. Pavol Hanzel, CSc.,
doc. PaedDr. Patrik Voštinár, PhD.
Recenzenti:
doc. RNDr. Tomáš Zdráhal, CSc.
doc. PaedDr. Milan Pokorný, PhD.
Vydavateľ:
© Belianum. Vydavateľstvo Univerzity Mateja Bela v Banskej Bystrici.
Edícia: Fakulta prírodných vied
Prvé vydanie, 2025.
Schválila Edičná komisia FPV UMB v Banskej Bystrici ako vysokoškolskú učebnicu. Rukopis neprešiel jazykovou úpravou.
ISBN ..., (online: iPDF)
EAN ...
Obsah
| Úvod | 4 |
| Historické poznámky | 6 |
| Obsahová štruktúra | 13 |
| Vektorový priestor | 15 |
| Lineárna závislosť vektorov | 19 |
| Dimenzia a báza | 22 |
| Skalárny súčin | 24 |
| Súradnice v báze | 28 |
| Vektorový a vonkajší súčin | 31 |
| Cauchy-Schwarzova nerovovnosť | 33 |
| Schmidtov ortogonalizačný proces | 37 |
| Afinný n-rozmerný priestor | 40 |
| Lineárna súradnicová sústava | 44 |
| Veta o súradniciach | 46 |
| Afinný podpriestor | 49 |
| Vzájomná poloha útvarov | 52 |
| Euklidovský priestor | 54 |
| Príklad | 56 |
| Lineárna kombinácia bodov | 57 |
| Deliaci pomer | 60 |
| Afinné zobrazenie | 64 |
| Tri body - príklad | 66 |
| Rôzne dimenzie | 69 |
| Všeobecne dimenzie | 72 |
| Jednoznačnosť AZ | 73 |
| Analytické vyjadrenie | 75 |
| Rozšírené matice | 78 |
| Rovnoľahlosť | 80 |
| Obraz troch bodov | 82 |
| Obraz repéra | 84 |
| Samodružnosť | 87 |
| Zhodnostné zobrazenia | 88 |
| Posunutie | 91 |
| Osová súmernosť | 93 |
| Stredová súmernosť | 96 |
| Otáčanie | 98 |
| Vzor a obraz | 101 |
| Cvičenie | 104 |
| Záver | 109 |
| Literatúra | 110 |
Úvod
Analytická geometria
je oblasť matematiky, v ktorej sa geometrické útvary študujú pomocou súradnicovej sústavy (pomocou analytických vyjadrení - rovníc).
Afinná geometria patrí medzi kľúčové disciplíny modernej matematiky, pričom zohráva zásadnú úlohu nielen v čisto teoretickej rovine, ale aj v aplikáciách v prírodných vedách, inžinierstve či informatike. Jej základom je štúdium geometrických útvarov a ich transformácií, ktoré zachovávajú vzájomnú polohu bodov a ich lineárne vlastnosti. Tento prístup umožňuje popisovať a analyzovať komplexné geometrické štruktúry prostredníctvom vektorových a matičných metód.
Cieľom tejto učebnice je poskytnúť študentom prehľad základných princípov afinného priestoru a zobrazení. Prezentované učivo postupne prechádza od fundamentálnych konceptov vektorového priestoru cez základy afinných transformácií až po ich aplikácie. Učebnica je štruktúrovaná tak, aby nadväzovala na znalosti z lineárnej algebry, čím poskytuje čitateľom pevný teoretický základ a zároveň ich pripravuje na pokročilejšie štúdium geometrie a príbuzných oblastí.
Prvá časť sa venuje základom vektorových priestorov, čo zahŕňa lineárnu závislosť, dimenziu, bázu a skalárny súčin. Táto sekcia slúži ako vstupná brána pre pochopenie štruktúry afinného priestoru, kde sú predstavené jeho základné vlastnosti vrátane vzájomnej polohy podpriestorov. Nasledujúca časť sa sústreďuje na afinné zobrazenia, ktoré sú kľúčovým nástrojom na pochopenie transformácií geometrických útvarov, ako sú posunutia, rovnoľahlosti a osové súmernosti. Záver učebnice zahŕňa aj konkrétne príklady a úlohy, ktoré pomáhajú študentom upevniť teoretické poznatky prostredníctvom praktických aplikácií.
V súčasnosti zohrávajú informačné a komunikačné technológie (IKT) dôležitú úlohu vo vzdelávaní, a analytická geometria nie je výnimkou. Prostredie GeoGebra, ktoré ponúka intuitívne ovládanie a široké možnosti vizualizácie, predstavuje efektívny nástroj na demonštráciu princípov afinných zobrazení a ich aplikácií. Applety vytvorené v GeoGebre umožňujú študentom interaktívne skúmať rôzne geometrické situácie, meniť parametre a okamžite sledovať výsledky svojich úprav. Tento prístup podporuje nielen lepšie pochopenie abstraktných konceptov, ale aj aktívne zapojenie študentov do procesu učenia. Okrem toho poskytuje možnosť skúmať zložité geometrické transformácie, ktoré by inak vyžadovali zložité manuálne výpočty.
Táto učebnica je určená pre študentov vysokých škôl, najmä tých, ktorí sa zaoberajú matematikou, fyzikou či informatickými disciplínami. Autori veria, že poskytnutý obsah im pomôže nielen pri riešení úloh v rámci štúdia, ale aj pri praktickom využití geometrických metód v ich budúcej kariére.
Cieľom tejto učebnice je poskytnúť študentom prehľad základných princípov afinného priestoru a zobrazení. Prezentované učivo postupne prechádza od fundamentálnych konceptov vektorového priestoru cez základy afinných transformácií až po ich aplikácie. Učebnica je štruktúrovaná tak, aby nadväzovala na znalosti z lineárnej algebry, čím poskytuje čitateľom pevný teoretický základ a zároveň ich pripravuje na pokročilejšie štúdium geometrie a príbuzných oblastí.
Prvá časť sa venuje základom vektorových priestorov, čo zahŕňa lineárnu závislosť, dimenziu, bázu a skalárny súčin. Táto sekcia slúži ako vstupná brána pre pochopenie štruktúry afinného priestoru, kde sú predstavené jeho základné vlastnosti vrátane vzájomnej polohy podpriestorov. Nasledujúca časť sa sústreďuje na afinné zobrazenia, ktoré sú kľúčovým nástrojom na pochopenie transformácií geometrických útvarov, ako sú posunutia, rovnoľahlosti a osové súmernosti. Záver učebnice zahŕňa aj konkrétne príklady a úlohy, ktoré pomáhajú študentom upevniť teoretické poznatky prostredníctvom praktických aplikácií.
V súčasnosti zohrávajú informačné a komunikačné technológie (IKT) dôležitú úlohu vo vzdelávaní, a analytická geometria nie je výnimkou. Prostredie GeoGebra, ktoré ponúka intuitívne ovládanie a široké možnosti vizualizácie, predstavuje efektívny nástroj na demonštráciu princípov afinných zobrazení a ich aplikácií. Applety vytvorené v GeoGebre umožňujú študentom interaktívne skúmať rôzne geometrické situácie, meniť parametre a okamžite sledovať výsledky svojich úprav. Tento prístup podporuje nielen lepšie pochopenie abstraktných konceptov, ale aj aktívne zapojenie študentov do procesu učenia. Okrem toho poskytuje možnosť skúmať zložité geometrické transformácie, ktoré by inak vyžadovali zložité manuálne výpočty.
Táto učebnica je určená pre študentov vysokých škôl, najmä tých, ktorí sa zaoberajú matematikou, fyzikou či informatickými disciplínami. Autori veria, že poskytnutý obsah im pomôže nielen pri riešení úloh v rámci štúdia, ale aj pri praktickom využití geometrických metód v ich budúcej kariére.
Dnes existujú vedľa seba dva spôsoby budovania geometrie:
- Syntetický - bez súradníc
- názorná, v ktorej sa konštrukcie geometrických útvarov uskutočňujú v súlade s axiomatickým systémom; dôkazy tvrdení sa robia prevažne konštrukčne;
- vychádzame z euklidovského priestoru podľa (Euklidove Základy);
- potom zavádzame pojem vektora a následne vektorového priestoru;
- syntetická metóda neformuluje explicitne vzťah geometrie k základnému poľu priestoru (Čižmár, J., 2007);
- základná schéma budovania: najprv vybudujeme euklidovský priestor a potom skonštruujeme vektorový priestor nad daným poľom;
- s algebraickým pohľadom na štruktúru vektorových priestoroch ste sa oboznámili v kurze Lineárna algebra.
- Analytický – so súradnicami
- do hry vstupuje algebraické pole – najčastejšie ide pole reálnych čísel;
- v 19. storočí sa v analytickej metóde začali využívať vektory a začali sa skúmať afinné (polohové) vlastnosti vektorov – operácie s vektormi;
- pri tejto metóde sa v geometrii pracuje ľahšie, v súčasnosti významne pomáhajú aj počítače;
- viac príležitostí skĺznuť k mechanickému počítaniu namiesto porozumenia geometrickej podstate daného problému;
- základná schéma budovania: najprv skonštruujeme vektorový priestor nad daným poľom a potom afinný priestor resp. euklidovský priestor.
V tejto učebnici sa zameeriame na druhý spôsob budovania geometrie. Budeme sa venovať základným pojmom, ktoré sa viažu na:
- vektorový priestor;
- afinný priestor;
- afinné transformácie;
- zhodnostné transformácie euklidovskej roviny.
\)
Historické poznámky
Historický vývoj analytickej (afinnej) geometrie.
Analytická geometria, známa aj ako kartézska geometria, je základnou disciplínou matematiky, ktorá spája algebru s geometriou. Tento vývojový proces však nebol okamžitý; jeho korene siahajú až do staroveku, pričom jeho postupné zdokonaľovanie pokračovalo až do 20. storočia.
- Od Euklida k moderným priestorom.
- René Descartes a jeho dielo "La Géométrie" (1637).
- Pierre de Fermat a jeho prínos.
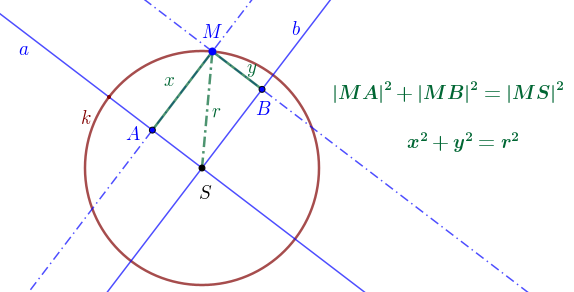
- Predstavme si, že
 označujú vzdialenosti bodu
označujú vzdialenosti bodu  od dvoch pevných referenčných priamok
od dvoch pevných referenčných priamok  , ktoré sú na seba kolmé.
, ktoré sú na seba kolmé. - Kružnica je potom definovaná ako súčet druhých mocnín týchto vzdialeností a tento súčet je rovný štvorcu polomeru:
 . To vyplýva z Pytagorovej vety, z euklidovskej geometrie.
. To vyplýva z Pytagorovej vety, z euklidovskej geometrie. - Dedičstvo Descarta a Fermata
- Bernhard Bolzano a operácie s bodmi a priamkami.
- Operácie medzi bodmi: Bolzano naznačil, že body a priamky môžu byť manipulované algebraickými spôsobmi, hoci tieto operácie ešte neboli presne formalizované. Pozrite si prezentáciu Tu.
- Geometrický význam: V jeho práci sa objavujú náznaky toho, že priamky možno považovať za výsledky operácií medzi bodmi, čím vytvoril predobraz vektorových operácií.
- Hermann Grassmann a jeho dielo "Die Lineale Ausdehnungslehre".
- Definícia vektora:
Grassmann po prvýkrát presne formalizoval pojem vektora ako matematického objektu, ktorý má nielen veľkosť, ale aj smer. Vektory už neboli viazané len na konkrétne geometrické objekty, ale mohli existovať v abstraktnom priestore. - Operácie s vektormi:
Zaviedol sčítanie vektorov, ktoré umožňuje kombinovať dva vektory tak, že výsledkom je nový vektor. Definoval násobenie vektora skalárom, čo mení jeho veľkosť bez zmeny smeru. - Vektorový priestor:
Grassmann opísal priestory, v ktorých tieto operácie platia, čím položil základy pre koncept vektorového priestoru. Tento priestor bol zovšeobecnením karteziánskej geometrie, pretože umožňoval pracovať s n-dimenzionálnymi priestormi. - Lineárna závislosť a nezávislosť:
Zaviedol pojmy, ktoré dnes označujeme ako lineárna závislosť a nezávislosť vektorov, čo je kľúčové pre štúdium dimenzií a bázy vektorového priestoru - Prechod od Bolzana ku Grassmannovi:
Zmena myslenia. Kým Bolzano ešte stále pracoval v rámci tradičnej geometrie, Grassmann urobil zásadný krok smerom k abstrakcii. Táto zmena myslenia znamenala prechod od vizuálneho a geometrického uvažovania k algebrickému formalizmu. Tento posun umožnil rozšírenie geometrických konceptov do vyšších dimenzií a položil základy modernej matematiky. - Dedičstvo v modernej matematike
Práca Bolzana a Grassmanna predstavuje kľúčové míľniky vo vývoji analytickej geometrie a lineárnej algebry. Grassmannove vektorové priestory sa stali základom pre vývoj mnohých oblastí matematiky, od diferenciálnej geometrie cez funkcionálnu analýzu až po teóriu relativity. Tieto koncepty ukazujú, ako sa matematické myslenie dokáže vyvíjať od konkrétnych geometrických pozorovaní k abstraktným a univerzálnym princípom. - Pozrite si prácu o zrode n- rozmernej geometrie: Čižmár, J. Začiatky a formovanie základov n - rozmernej geometrie. Dostupné Tu.
- William Rowan Hamilton
- Kvaternióny môžu reprezentovať body a vektory v trojrozmernom priestore ako čisté kvaternióny (
 ).
Rotácie:
).
Rotácie:
- Rotácie okolo akejkoľvek osi v trojrozmernom priestore môžu byť efektívne reprezentované pomocou kvaterniónov. To je mimoriadne užitočné v grafike, robotike a leteckom inžinierstve, pretože kvaternióny eliminujú problém gimbal lock (straty stupňov voľnosti pri rotáciách). Transformácie:
- Kvaternióny zjednodušujú výpočty spojené s transformáciami objektov v priestore, čo sa stalo základom pre moderné 3D modelovanie a počítačové simulácie.
- Kvaternióny inšpirovali neskorší vývoj vektorovej analýzy. William Thomson (Lord Kelvin) a Peter Guthrie Tait, ktorí pracovali s kvaterniónmi, položili základy modernej vektorovej matematiky. Fyzika:
- Kvaternióny našli uplatnenie vo fyzike, najmä v kvantovej mechanike a teórii relativity, kde sa používajú na opis rotácií a symetrií. Informatika a počítačová grafika:
- V modernej dobe sú kvaternióny neoddeliteľnou súčasťou 3D počítačovej grafiky, kde slúžia na manipuláciu a animáciu objektov v trojrozmernom priestore.
- Giuseppe Peano a axiomatizácia vektorového priestoru.
- Operácie medzi vektormi:
Zaviedol sčítanie vektorov, ktoré musí byť komutatívne a asociatívne.
Určil existenciu nulového vektora, ktorý nemá žiadny smer ani veľkosť.
Definoval opačný vektor, ktorý v kombinácii s pôvodným dáva nulový vektor. - Násobenie skalárom:
Peano formalizoval násobenie vektora skalárnou hodnotou, ktoré mení veľkosť (a prípadne smer) vektora. - Axiomatické vlastnosti:
Operácie musia byť kompatibilné so skalármi, pričom skaláre patria k číselnému poľu, zvyčajne k reálnym alebo komplexným číslam. - Banachov priestor je vektorový priestor vybavený normou, ktorá umožňuje merať "veľkosť" vektorov.
- Má vlastnosť úplnosti, čo znamená, že každá Cauchyho postupnosť vektorov v tomto priestore má limit, ktorý patrí do priestoru.
- Teória diferenciálnych rovníc.
- Kvantová mechanika a teória distribúcií.
- Numerická matematika a optimalizácia.
- Tieto priestory majú skalárny súčin, ktorý umožňuje definovať ortogonalitu a uhol medzi vektormi.
- Sú mimoriadne dôležité v kvantovej fyzike, kde reprezentujú stavový priestor kvantových systémov.
- Kvantová mechanika, kde opisujú vlnové funkcie.
- Štatistická analýza a strojové učenie.
- Teória signálov a Fourierova analýza.
Už v 3. storočí pred naším letopočtom Euklides vo svojom diele Základy (Elements) položil základy geometrie, ktorú dnes označujeme ako euklidovskú. Euklidovská geometria opisuje priestor pomocou základných geometrických prvkov: bodov, priamok a rovín. Euklidov prístup sa sústredil na primitívne pojmy (elementy) bod, priamka a rovina a na primitívne vzťahy medzi týmito pojmami, Základné elementy opisoval pomocou logických axióm a deduktívnych dôkazov, pričom na konštrukciu väčšiny základných geometrických útvarov používal len pravítko a kružidlo. Takéto konštrukcie dodnes nesú pomenovanie po Euklidovi – euklidovské konštrukcie. Euklidovská geometria fungovala výhradne na konštrukčných geometrických princípoch. Tento systém bol čisto geometrický, bez použitia čísel a algebrických rovníc popisoval geometrické objekty a vzťahy medi nimi.
V roku 1635 nastala zásadná revolúcia. Francúzski matematici René Descartes a Pierre de Fermat zaviedli súradnicový systém, ktorý umožnil prepojenie geometrických útvarov s algebrickými rovnicami. Tento nový spôsob uvažovania, publikovaný Descartesom v diele La Géométrie, umožnil riešiť geometrické problémy algebrickými metódami.
Francúzski matematici René Descartes a Pierre de Fermat zohrali zásadnú úlohu vo vzniku analytickej geometrie tým, že zaviedli súradnicový systém, ktorý umožnil prepojenie geometrických a algebrických princípov. Ich práca vznikala na pozadí veľkých spoločenských a vedeckých zmien 17. storočia, keď sa renesancia a skoré novoveké myslenie zameriavali na racionalitu, dôkazy a systematické skúmanie prírody.
V roku 1635 nastala zásadná revolúcia. Francúzski matematici René Descartes a Pierre de Fermat zaviedli súradnicový systém, ktorý umožnil prepojenie geometrických útvarov s algebrickými rovnicami. Tento nový spôsob uvažovania, publikovaný Descartesom v diele La Géométrie, umožnil riešiť geometrické problémy algebrickými metódami.
Francúzski matematici René Descartes a Pierre de Fermat zohrali zásadnú úlohu vo vzniku analytickej geometrie tým, že zaviedli súradnicový systém, ktorý umožnil prepojenie geometrických a algebrických princípov. Ich práca vznikala na pozadí veľkých spoločenských a vedeckých zmien 17. storočia, keď sa renesancia a skoré novoveké myslenie zameriavali na racionalitu, dôkazy a systematické skúmanie prírody.
René Descartes (1596–1650), považovaný za otca moderného filozofického racionalizmu, predstavil svoju metódu spojenia geometrie a algebry vo svojom diele La Géométrie, ktoré bolo súčasťou širšej publikácie Diskurz o metóde. Dielo je dostupné v PDF formáte, pozri prácu [DEC, 1954]. Francúzsky originál sa náchádza na stránke Univerzity v Nantes a je dostupný
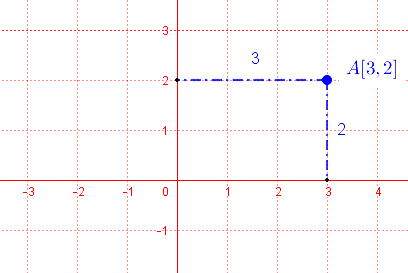
Tu. V tomto diele opísal princípy karteziánskej súradnicovej sústavy, v ktorej každý bod  z roviny
z roviny  je reprezentovaný dvojicou reálnych čísel.
je reprezentovaný dvojicou reálnych čísel.
Historický význam Descartovho prístupu:
Prepojenie geometrie s algebrou: Descartes ukázal, že geometrické problémy, ako sú umiestnenie bodov, kreslenie priamok či riešenie úloh s kružnicami, možno riešiť pomocou algebrických rovníc. Napríklad algebrická rovnica predstavuje priamku, čo bolo revolučné v porovnaní s tradičným čistým geometrickým prístupom.
predstavuje priamku, čo bolo revolučné v porovnaní s tradičným čistým geometrickým prístupom.
Vedecký kontext:
Descartesovo dielo vzniklo v čase, keď sa začínali systematicky rozvíjať fyzika a matematika. Jeho prístup poskytol nástroj na popis pohybu a zmien v priestore, čím významne prispel k vývoju mechaniky a neskôr k Newtonovým zákonom pohybu.
Karteziánska sústava:
Karteziánska súradnicová sústava, pomenovaná podľa Descartesovho latinského mena Cartesius, položila pevné základy pre modernú analytickú geometriu. Descartes ukázal, že ak si zvolíme pevný referenčný bod (počiatok) a súradnicové osi, môžeme popísať celý priestor pomocou čísel.
z roviny je reprezentovaný dvojicou reálnych čísel.
![A=[x,y];x,y \in \mathbb R](https://lms.umb.sk/filter/tex/pix.php/8e0883ce5f683d097a65c1bfea944952.png "A=[x,y];x,y \in \mathbb R")
Historický význam Descartovho prístupu:
Prepojenie geometrie s algebrou: Descartes ukázal, že geometrické problémy, ako sú umiestnenie bodov, kreslenie priamok či riešenie úloh s kružnicami, možno riešiť pomocou algebrických rovníc. Napríklad algebrická rovnica
predstavuje priamku, čo bolo revolučné v porovnaní s tradičným čistým geometrickým prístupom.
Vedecký kontext:
Descartesovo dielo vzniklo v čase, keď sa začínali systematicky rozvíjať fyzika a matematika. Jeho prístup poskytol nástroj na popis pohybu a zmien v priestore, čím významne prispel k vývoju mechaniky a neskôr k Newtonovým zákonom pohybu.
Karteziánska sústava:
Karteziánska súradnicová sústava, pomenovaná podľa Descartesovho latinského mena Cartesius, položila pevné základy pre modernú analytickú geometriu. Descartes ukázal, že ak si zvolíme pevný referenčný bod (počiatok) a súradnicové osi, môžeme popísať celý priestor pomocou čísel.
Pierre de Fermat (1601–1665), známy aj ako zakladateľ modernej teórie čísel, sa nezávisle od Descarta venoval aj geometrii. Aj keď Fermat svoje práce nezverejnil systematicky počas svojho života, jeho korešpondencia a rukopisy dokazujú, že už pred Descartesom používal algebraické metódy na riešenie geometrických problémov. Fermat skúmal vlastnosti kriviek a priamok pomocou algebrických rovníc, čím podobne ako Descartes položil základy analytickej geometrie. Fermatove myšlienky o krivkách a algebrických rovniciach mali významný vplyv na neskorší vývoj matematiky, vrátane diferenciálneho a integrálneho počtu.
Pierre de Fermat síce nepoužíval súradnicovú sústavu tak, ako ju poznáme dnes. Jeho prístup k algebraickému popisu geometrických útvarov bol založený na konceptoch, ktoré predchádzali karteziánsku súradnicovú sústavu Reného Descarta.
možno generalizovať, a tak vznikla karteziánska sústava.
Príklad.
Fermat kružnicu definoval ako množinu bodov, ktoré majú konštantnú vzdialenosť od stredu, pričom túto vzdialenosť opisoval algebraicky. Fermat používal písmená na označenie premenných/vzdialeností, ktoré zodpovedali dĺžkam úsekov. V modernej notácii môžeme jeho prístup chápať nasledovne:
od stredu, pričom túto vzdialenosť opisoval algebraicky. Fermat používal písmená na označenie premenných/vzdialeností, ktoré zodpovedali dĺžkam úsekov. V modernej notácii môžeme jeho prístup chápať nasledovne:
Z uvedeného príkladu vidieť, že "zatiaľ" Fermat nepotreboval súradnicové osi. Až Descartes si uvedomil, že priamky Fermat kružnicu definoval ako množinu bodov, ktoré majú konštantnú vzdialenosť
od stredu, pričom túto vzdialenosť opisoval algebraicky. Fermat používal písmená na označenie premenných/vzdialeností, ktoré zodpovedali dĺžkam úsekov. V modernej notácii môžeme jeho prístup chápať nasledovne:
 možno generalizovať, a tak vznikla karteziánska sústava.
možno generalizovať, a tak vznikla karteziánska sústava.
Zavedenie súradnicového systému znamenalo začiatok novej éry v matematike. Predstavovalo revolúciu v geometrii. Umožnilo analyzovať geometrické útvary algebrickými metódami, čím prepojil dve dovtedy samostatné oblasti matematiky.
Inšpirácia pre ďalších vedcov
Ich práca bola kľúčová pre vývoj diferenciálneho a integrálneho počtu (Newton, Leibniz), lineárnej algebry a fyziky.
Praktické aplikácie
Dnes je karteziánska geometria základom všetkých moderných matematických a technických disciplín, od počítačovej grafiky až po kvantovú mechaniku.
Práca Descarta a Fermata nebola len matematickou inováciou, ale aj súčasťou širšieho intelektuálneho hnutia, ktoré formovalo moderný vedecký pohľad na svet. Analytická geometria tak ukazuje, ako interdisciplinárne myslenie a prepojenie filozofie, matematiky a prírodných vied môžu viesť k revolučným objavom.
Analytická geometria, ktorá vznikla spojením geometrie a algebry v 17. storočí, sa v nasledujúcich storočiach neustále vyvíjala a rozširovala o nové koncepty. Kým Descartes a Fermat položili základy tým, že zaviedli súradnicový systém, ďalšie pokroky smerovali k formalizácii a zovšeobecneniu geometrických a algebrických princípov. Jedným z dôležitých krokov v tomto vývoji bola práca Bernharda Bolzana a Hermanna Grassmanna, ktorí prispeli k rozvoju konceptu vektorového priestoru.
Inšpirácia pre ďalších vedcov
Ich práca bola kľúčová pre vývoj diferenciálneho a integrálneho počtu (Newton, Leibniz), lineárnej algebry a fyziky.
Praktické aplikácie
Dnes je karteziánska geometria základom všetkých moderných matematických a technických disciplín, od počítačovej grafiky až po kvantovú mechaniku.
Práca Descarta a Fermata nebola len matematickou inováciou, ale aj súčasťou širšieho intelektuálneho hnutia, ktoré formovalo moderný vedecký pohľad na svet. Analytická geometria tak ukazuje, ako interdisciplinárne myslenie a prepojenie filozofie, matematiky a prírodných vied môžu viesť k revolučným objavom.
Analytická geometria, ktorá vznikla spojením geometrie a algebry v 17. storočí, sa v nasledujúcich storočiach neustále vyvíjala a rozširovala o nové koncepty. Kým Descartes a Fermat položili základy tým, že zaviedli súradnicový systém, ďalšie pokroky smerovali k formalizácii a zovšeobecneniu geometrických a algebrických princípov. Jedným z dôležitých krokov v tomto vývoji bola práca Bernharda Bolzana a Hermanna Grassmanna, ktorí prispeli k rozvoju konceptu vektorového priestoru.
Bernhard Bolzano (1781–1848), český matematik a filozof, sa vo svojej práci venoval množstvu otázok spojených s matematikou, logikou a filozofiou. V oblasti geometrie skúmal operácie s bodmi a priamkami, pričom jeho metódy vykazovali základné prvky konceptu, ktorý dnes označujeme ako vektor.
Bolzanove myšlienky:
Hermann Grassmann (1809–1877), nemecký matematik a filológ, je dnes považovaný za jedného z najvýznamnejších priekopníkov modernej lineárnej algebry. Vo svojej knihe Die Lineale Ausdehnungslehre, 1844 (Lineárna teória rozšírení) predstavil koncept, ktorý dnes poznáme ako vektorový priestor. Kniha Hermanna Grassmanna "Die lineale Ausdehnungslehre, ein neuer Zweig der Mathematik" z roku 1844 je dostupná online
Tu. Táto kniha bola revolučná nielen pre geometriu, ale aj pre algebru a matematickú analýzu.
Grassmannove inovácie:
Pozrite si tiež poznámky Tu.
Pozrite si tiež poznámky Tu.
Poznámky.
William Rowan Hamilton (1805–1865), írsky matematik, fyzik a astronóm, zohral kľúčovú úlohu vo vývoji matematiky a rozšírení geometrických konceptov zavedením kvaterniónov v roku 1843. Kvaternióny, ktoré sú štvordimenzionálne entity, predstavujú prelomový krok v algebrizácii geometrie a analýze priestoru. Hamiltonova práca poskytla matematický základ pre manipuláciu s bodmi a vektormi v trojrozmernom priestore a neskôr aj vo fyzike a informatike.
________________________________________
Zrod kvaterniónov
Hamiltonova práca na kvaterniónoch bola motivovaná jeho snahou rozšíriť koncept komplexných čísel do troch alebo viacerých dimenzií. Komplexné čísla, ktoré sa vyjadrujú v tvare , kde
, kde  je imaginárna jednotka (
je imaginárna jednotka ( ), boli už v jeho čase dobre pochopené a používané na reprezentáciu dvojrozmerných rotácií a transformácií. Hamilton sa však snažil vytvoriť podobnú algebru pre trojrozmerný priestor.
), boli už v jeho čase dobre pochopené a používané na reprezentáciu dvojrozmerných rotácií a transformácií. Hamilton sa však snažil vytvoriť podobnú algebru pre trojrozmerný priestor.
Po rokoch neúspechov si Hamilton uvedomil, že trojdimenzionálny systém nezachováva kľúčové vlastnosti komplexných čísel, ale štvordimenzionálny systém áno. Tento prelomový objav nastal 16. októbra 1843, keď si Hamilton počas prechádzky v Dubline uvedomil rovnice pre kvaternióny a vyryl ich na most Broom Bridge.
________________________________________
Čo sú kvaternióny?
Kvaternióny sú rozšírením komplexných čísel, ktoré majú tvar:
 ,
,
kde a, b, c, d sú reálne čísla a i, j, k sú imaginárne jednotky, ktoré spĺňajú nasledovné pravidlá:
 .
.
Tieto pravidlá vedú k nekomutatívnej algebre, čo znamená, že násobenie kvaterniónov nie je komutatívne ( ). Tento nekomutatívny charakter bol novinkou a odklonom od tradičných matematických systémov.
). Tento nekomutatívny charakter bol novinkou a odklonom od tradičných matematických systémov.
________________________________________
Použitie kvaterniónov v geometrii
Kvaternióny umožnili opisovať rotácie a transformácie v trojrozmernom priestore, pričom nahradili komplikovanejší systém založený na maticiach alebo eulerovských uhloch. Hlavné aplikácie zahŕňajú:
Historický význam a vplyv kvaterniónov
Hamiltonove kvaternióny mali zásadný význam pre rozvoj matematiky a fyziky. Ich vplyv možno pozorovať v niekoľkých oblastiach.
William Rowan Hamilton svojím objavom kvaterniónov nielenže rozšíril hranice geometrie, ale tiež položil základy pre moderné chápanie algebrických štruktúr a ich aplikácií. Kvaternióny sa stali jedným z prvých príkladov nekomutatívnej algebry a ukázali, že abstraktné matematické systémy môžu mať praktické a revolučné aplikácie. Hamiltonova práca tak symbolizuje spojenie čistého matematického myslenia s praktickými inováciami.
________________________________________
Zrod kvaterniónov
Hamiltonova práca na kvaterniónoch bola motivovaná jeho snahou rozšíriť koncept komplexných čísel do troch alebo viacerých dimenzií. Komplexné čísla, ktoré sa vyjadrujú v tvare
, kde je imaginárna jednotka (), boli už v jeho čase dobre pochopené a používané na reprezentáciu dvojrozmerných rotácií a transformácií. Hamilton sa však snažil vytvoriť podobnú algebru pre trojrozmerný priestor.Po rokoch neúspechov si Hamilton uvedomil, že trojdimenzionálny systém nezachováva kľúčové vlastnosti komplexných čísel, ale štvordimenzionálny systém áno. Tento prelomový objav nastal 16. októbra 1843, keď si Hamilton počas prechádzky v Dubline uvedomil rovnice pre kvaternióny a vyryl ich na most Broom Bridge.
________________________________________
Čo sú kvaternióny?
Kvaternióny sú rozšírením komplexných čísel, ktoré majú tvar:
, kde a, b, c, d sú reálne čísla a i, j, k sú imaginárne jednotky, ktoré spĺňajú nasledovné pravidlá:
.Tieto pravidlá vedú k nekomutatívnej algebre, čo znamená, že násobenie kvaterniónov nie je komutatívne (
). Tento nekomutatívny charakter bol novinkou a odklonom od tradičných matematických systémov.________________________________________
Použitie kvaterniónov v geometrii
Kvaternióny umožnili opisovať rotácie a transformácie v trojrozmernom priestore, pričom nahradili komplikovanejší systém založený na maticiach alebo eulerovských uhloch. Hlavné aplikácie zahŕňajú:
-
Reprezentácia bodov a vektorov:
Historický význam a vplyv kvaterniónov
Hamiltonove kvaternióny mali zásadný význam pre rozvoj matematiky a fyziky. Ich vplyv možno pozorovať v niekoľkých oblastiach.
-
Vektorová analýza:
William Rowan Hamilton svojím objavom kvaterniónov nielenže rozšíril hranice geometrie, ale tiež položil základy pre moderné chápanie algebrických štruktúr a ich aplikácií. Kvaternióny sa stali jedným z prvých príkladov nekomutatívnej algebry a ukázali, že abstraktné matematické systémy môžu mať praktické a revolučné aplikácie. Hamiltonova práca tak symbolizuje spojenie čistého matematického myslenia s praktickými inováciami.
Moderná definícia vektorového priestoru sa zrodila v roku 1888 vďaka talianskemu matematikovi Giuseppemu Peanovi. Jeho práca znamenala významný krok vo formalizácii matematiky a položila pevné základy pre ďalší rozvoj geometrie a algebry. Peano bol priekopníkom axiomatického prístupu, ktorý matematiku zbavil závislosti na intuitívnych predstavách a priniesol dôslednú logickú štruktúru.
Peanov prínos spočíval v tom, že definoval vektorový priestor prostredníctvom systému axióm, ktoré presne špecifikovali, ako majú vektory a operácie medzi nimi fungovať. Tento formálny prístup sa stal základom modernej matematiky.
Peanove axiomatické pravidlá:
Peanov prínos spočíval v tom, že definoval vektorový priestor prostredníctvom systému axióm, ktoré presne špecifikovali, ako majú vektory a operácie medzi nimi fungovať. Tento formálny prístup sa stal základom modernej matematiky.
Peanove axiomatické pravidlá:
Rozšírenie vektorového priestoru v 20. storočí.
Na prelome 19. a 20. storočia Peanove axiomatické základy rozvíjali ďalší významní matematici, ako Stefan Banach a David Hilbert. Títo vedci priniesli nové typy priestorov, ktoré významne obohatili matematickú analýzu a funkcionálnu analýzu.
Stefan Banach a Banachove priestory
Stefan Banach (1892–1945) bol poľský matematik, ktorý zaviedol pojem Banachovho priestoru, čo je kompletný normovaný vektorový priestor. Tento koncept sa stal základom funkcionálnej analýzy a našiel široké uplatnenie v rôznych oblastiach matematiky.
Charakteristika Banachových priestorov:
David Hilbert a Hilbertove priestory
David Hilbert (1862–1943), nemecký matematik, zaviedol koncept Hilbertovho priestoru, ktorý je špeciálnym prípadom Banachovho priestoru, kde norma vychádza zo skalárneho súčinu.
Charakteristika Hilbertových priestorov:
Stefan Banach a Banachove priestory
Stefan Banach (1892–1945) bol poľský matematik, ktorý zaviedol pojem Banachovho priestoru, čo je kompletný normovaný vektorový priestor. Tento koncept sa stal základom funkcionálnej analýzy a našiel široké uplatnenie v rôznych oblastiach matematiky.
Charakteristika Banachových priestorov:
David Hilbert a Hilbertove priestory
David Hilbert (1862–1943), nemecký matematik, zaviedol koncept Hilbertovho priestoru, ktorý je špeciálnym prípadom Banachovho priestoru, kde norma vychádza zo skalárneho súčinu.
Charakteristika Hilbertových priestorov:
Vývoj od Euklida po moderné priestory.
Celkový vývoj analytickej geometrie ilustruje fascinujúcu transformáciu geometrických intuící na abstraktné algebraické štruktúry. Celý vývoj môžeme zhrnúť do 5 bodov:
Celkový vývoj analytickej geometrie ilustruje fascinujúcu transformáciu geometrických intuící na abstraktné algebraické štruktúry. Celý vývoj môžeme zhrnúť do 5 bodov:
- Euklidova geometria: Geometria založená na axiómach a vizuálnej intuícii.
- Descartov súradnicový systém: Spojenie geometrie a algebry, ktoré umožnilo analyzovať geometrické problémy pomocou rovníc.
- Grassmannove vektorové priestory: Zavedenie vektorov ako základných stavebných kameňov priestoru.
- Peanove axiomatické pravidlá: Formalizácia vektorových priestorov a oslobodenie od geometrickej intuície.
- Banachove a Hilbertove priestory: Zovšeobecnenie vektorových priestorov a ich aplikácia v modernej matematike a fyzike.
\)
Obsahová štruktúra
Pri zostavení predkladanej vysokoškolskej učebnice sme sa zamerali na dve hlavné oblasti.
- Prvá obsahuje témy lineárnej algebry, ktoré sú nevyhnutné pri štúdiu afinných transformácií. Vybrané algebraické témy sú prezentované tak, aby zdôrazňovali ich geometrickú podstatu. Z toho dôvodu sa do tejto časti učebnice zaradené dynamické applety vytvorené v prostredí GeoGebra. Applety demonštrujú polohové vlastnosti vektorových operácií, podpriestorov ako aj niektoré metrické vlastnosti.
- Druhú časť sme zamerali na vlastnosti afinných transformácií v euklidovskej rovine. Cieľom tejto časti je priblížiť študentom učiteľstva matematiky súvislosti medzi analytickým vyjadrením transformácií a ich geometrickou interpretáciou pomocou interaktívnych appletov.
Afinný priestor
Štruktúra prvej časti predkladanej učebnice
- Vektorový priestor. Skalárny súčin vektorov a jeho vlastnosti. Norma vektora, normovaný vektor. Schwartzova nerovnosť.
- Uhol dvoch vektorov. Ortogonálne a ortonormálne vektory. Schmidtov ortogonalizačný proces. Totálne kolmé a kolmé podpriestory.
- Vonkajší súčin v
 -rozmernom vektorovom priestore. Vektorový súčin v 3-rozmernom vektorovom priestore. Ortogonálny doplnok vektorov.
-rozmernom vektorovom priestore. Vektorový súčin v 3-rozmernom vektorovom priestore. Ortogonálny doplnok vektorov. - Afinný priestor a jeho vlastnosti. Lineárna sústava súradníc. Transformácia lineárnej sústavy súradníc. Deliaci pomer, stred dvojice bodov.
- Podpriestory afinného priestoru, parametrické vyjadrenie afinného podpriestoru, vzájomná poloha afinných podpriestorov.
- Priečka mimobežiek, určenie priečky daným bodom a daným smerom.
- Spojenie afinných podpriestorov. Všeobecná rovnica nadroviny. Zväzok priamok a zväzok rovín.
- Euklidovský priestor. Karteziánska súradnicová sústava. Normálový vektor nadroviny. Vzdialenosť dvoch bodov (bodu od podpriestoru).
- Vzájomná poloha podpriestorov v n-rozmernom euklidovskom priestore. Vzdialenosť dvoch mimobežných podpriestorov. Odchýlka dvoch podpriestorov.
Afinné tansformácie
Štruktúra druhej časti predkladanej učebnice
- Afinné zobrazenie a jeho anylytické vyjadrenie.
- Analytické vyjadrenie zhodného zobrazenia. Samodružné prvky zhodnosti. Grupa zhodností.
- Posunutie a rovnoľahlosť ako afinné zobrazenie.
- Zhodné zobrazenia v rovine, ich analytické vyjadrenie. Stredová súmernosť. Otočenie.
- Osová súmernosť, jej analytické vyjadrenie.
- Klasifikácia zhodností euklidovskej roviny a v euklidovskom priestore. Skladanie zhodných zobrazení.
- Podobné zobrazenie. Samodružné prvky podobnosti. Analytické vyjadrenie podobnosti euklidovskej roviny.
- Úlohy riešené s využitím programu GeoGebra.
- Zhodné a podobné zobrazenia v rovine a v priestore v učive ZŠ a SŠ.
- Rovnoľahlosť v školskej matematike. Rovnoľahlosť kružníc. Využitie rovnoľahlosti.
\)
Vektorový priestor
Syntetický (geometrický) prístup
- Orientovaná úsečka je úsečka, ktorej krajné body majú určené poradie (pripúšťame aj nulovú orientovanú úsečku).
Ak
 je orientovaná úsečka, bod
je orientovaná úsečka, bod  sa nazýva jej začiatočný bod, bod
sa nazýva jej začiatočný bod, bod  jej koncový bod.
jej koncový bod. - Hovoríme, že orientované úsečky
 sú súhlasne orientované (rovnobežné, majú ten istý smer),
ak polpriamky
sú súhlasne orientované (rovnobežné, majú ten istý smer),
ak polpriamky  incidujú s priamkami tej istej osnovy a zároveň:
incidujú s priamkami tej istej osnovy a zároveň:
- jedna z polpriamok je časťou druhej alebo
- obe polpriamky ležia v tej istej polrovine určenej priamkou
 .
. - V opačnom prípade sa orientované úsečky nazývajú nesúhlasne orientované. Symbolický zápis pre súhlasne orientované úsečky
 a nesúhlasne orientované
a nesúhlasne orientované  .
.
- Orientované úsečky sú ekvivalentné ak stredy úsečiek
 sú totožné.
sú totožné. - Geometrickým vektorom nazývame množinu všetkých orientovaných úsečiek, ktoré sú ekvivalentné s
 .
. - Orientovaná úsečka
 sa nazýva reprezentant (umiestnenie) vektora
sa nazýva reprezentant (umiestnenie) vektora  ,
zapisujeme
,
zapisujeme  .
. - Geometrický vektor sa nazýva aj voľný vektor (množina všetkých orientovaných úsečiek) a konkrétna orientovaná úsečka sa nazýva viazaný vektor.
- Orientovaná úsečka
 je reprezentuje opačný vektor k vektoru a označujeme ho
je reprezentuje opačný vektor k vektoru a označujeme ho  .
.
Cvičenie - [MOZ, 1.1.16 b]. Nezabudnite na nulové vektory.
Východiskové definície
Vo všeobecnosti vektor je množina všetkých navzájom zhodných, súhlasne orientovaných úsečiek.
Umiestnením vektora sa nazýva každá orientovaná úsečka, ktorá tento vektor určuje. Umiestnením vektora do bodu sa nazýva také jeho umiestnenie, ktorého začiatočným bodom je daný bod.
Vektor určený orientovanou úsečkou označíme tiež ako rozdiel bodov:  . Otvorte si applet
Tu.
. Otvorte si applet
Tu.
"Slovo vektor je prevzaté z latinského slova vector („nositeľ“, …). Vektor vznikol z potrieb fyziky (kde napr. vektor interpretujeme ako silu), do matematiky zaviedol vektory v r. 1853 írsky matematik a fyzik W. R. Hamilton (1805 – 1865). Takmer súčasnú podobu dal „vektorovému počtu“ na konci 19. storočia americký fyzik J. W. Gibbs (1839 – 1903)." Prevzaté z práce (Vranková).
Vo všeobecnosti vektor je množina všetkých navzájom zhodných, súhlasne orientovaných úsečiek.
Umiestnením vektora sa nazýva každá orientovaná úsečka, ktorá tento vektor určuje. Umiestnením vektora do bodu sa nazýva také jeho umiestnenie, ktorého začiatočným bodom je daný bod.
Vektor určený orientovanou úsečkou
označíme tiež ako rozdiel bodov: . Otvorte si applet
Tu.
"Slovo vektor je prevzaté z latinského slova vector („nositeľ“, …). Vektor vznikol z potrieb fyziky (kde napr. vektor interpretujeme ako silu), do matematiky zaviedol vektory v r. 1853 írsky matematik a fyzik W. R. Hamilton (1805 – 1865). Takmer súčasnú podobu dal „vektorovému počtu“ na konci 19. storočia americký fyzik J. W. Gibbs (1839 – 1903)." Prevzaté z práce (Vranková).
Okruh ") s jednotkou
s jednotkou 
 ), v ktorom každý nenulový prvok má vzhľadom na násobenie inverzný prvok, nazývame telesom.
Komutatívne teleso, v ktorom násobenie je komutatívna operácia, nazývame pole.
), v ktorom každý nenulový prvok má vzhľadom na násobenie inverzný prvok, nazývame telesom.
Komutatívne teleso, v ktorom násobenie je komutatívna operácia, nazývame pole.
s jednotkou ), v ktorom každý nenulový prvok má vzhľadom na násobenie inverzný prvok, nazývame telesom.
Komutatívne teleso, v ktorom násobenie je komutatívna operácia, nazývame pole.
Nech sú dané
• neprázdna množina , ktorej prvky nazývame vektory,
, ktorej prvky nazývame vektory,
• pole , ktorého prvky nazývame skaláry,
, ktorého prvky nazývame skaláry,
• zobrazenie , ktoré nazývame sčítanie vektorov,
, ktoré nazývame sčítanie vektorov,
• zobrazenie , ktoré nazývame násobenie vektora skalárom (prvkom z telesa
, ktoré nazývame násobenie vektora skalárom (prvkom z telesa  ).
).
• neprázdna množina
, ktorej prvky nazývame vektory,
• pole
, ktorého prvky nazývame skaláry,
• zobrazenie
, ktoré nazývame sčítanie vektorov,
• zobrazenie
, ktoré nazývame násobenie vektora skalárom (prvkom z telesa ).
Definícia (Vektorový priestor).
Vektorový priestor nad poľom1) je množina spolu s dvoma binárnymi operáciami (
je množina spolu s dvoma binárnymi operáciami (  )
práve vtedy, keď súčasne platia vzťahy:
)
práve vtedy, keď súčasne platia vzťahy:
Vektorový priestor nad poľom1)
je množina spolu s dvoma binárnymi operáciami ( )
práve vtedy, keď súčasne platia vzťahy:
") je abelovská grupa.
Vektorové axiómy
je abelovská grupa.
Vektorové axiómy
- asociatívnosť pre násobenie vektora skalárom:
 = (ab) \cdot \vec v")
- invariancia vektora pri vynásobení jednotkovým prvkom poľa:
 ,
,
kde označuje multiplikatívnu identitu vo
označuje multiplikatívnu identitu vo - distributívnosť (skalárneho) násobenia k sčítaniu vektorov:
 = a \cdot \vec u + a \cdot \vec v")
- distributívnosť násobenia vektora
 , ku sčítaniu skalárov :
, ku sčítaniu skalárov :  \cdot \vec v = a \cdot \vec v + b \cdot \vec v")
Na zopakovanie základných pojmov a vlastností algebraickej štruktúry "Vektorový priestor" odporúčame okrem práce od profesora Haviara aj e-knihu venovanú vektorovým priestorom od RNDr. Edity Vrankovej z Trnavskej univerzity v Trnave. Tiež na zopakovanie operácií s vektormi odporúčame prácu "Vektory v geometrii" od PaedDr. Miroslava Tisoňa, PhD., ktorá je dostupná
Tu.
Interpretujte vzťahy uvedené v definícii vektorového priestoru v prostredí GeoGebra!
Interpretujte vzťahy uvedené v definícii vektorového priestoru v prostredí GeoGebra!
Analytický (algebraický) prístup
Príklady vektorového priestoru.
- Vektory v rovine so sčitovaním a násobením ako ho poznáte zo strednej školy, tvoria vektorový priestor nad telesom reálnych čísel
 .
.
- Usporiadané
 -tice reálnych čísel s operáciami
-tice reálnych čísel s operáciami  definovanými po súradniciach tvoria vektorový priestor
nad telesom reálnych čísel
definovanými po súradniciach tvoria vektorový priestor
nad telesom reálnych čísel  .
.
 + (y_1, y_2 . . . , y_n) = (x_1 + y_1, x_2 + y_2 . . . , x_n + y_n)")
 = (c \cdot x _1, c \cdot x_2, . . . , c \cdot x_n)")
V ďalších častiach budeme prevažne pracovať s vektormi, ktoré tvoria usporiadané-tice reálnych čísel a to len pre rovinu  resp. priestor
resp. priestor 
Ďalšie príklady vektorových priestorov sú množiny (všetkých)
- polynómov v jednej neurčitej nad poľom reálnych čísel, operácia - sčítanie polynómov "podľa rovnakých mocnín",
- reálnych funkcií, operácia - bežný súčet funkčných hodnôt,
- matíc typu
 , operácia sčítania matíc - sčítanie v rovnakom riadku a stĺpci.
, operácia sčítania matíc - sčítanie v rovnakom riadku a stĺpci.
Cvičenie.
Nech je daná množina usporiadaných trojíc resp. dvojíc s obvyklým sčitovaním "po zložkách" trojíc resp. dvojíc reálnych čísel.
usporiadaných trojíc resp. dvojíc s obvyklým sčitovaním "po zložkách" trojíc resp. dvojíc reálnych čísel.
Nech je daná množina
usporiadaných trojíc resp. dvojíc s obvyklým sčitovaním "po zložkách" trojíc resp. dvojíc reálnych čísel.
 \in \mathbb R^3 ; x_1 + x_2 -2x_3 = 0}\rbrace") .
. \in \mathbb Z^2 ; x-3y=0 }\rbrace") .
. \in \mathbb Z^2 ; x+3y=1}\rbrace") .
.- Rozhodnite, či množina
 \in \mathbb Z^2 ; p(x);8p(0)+6p(1)=0}\rbrace") je vektorovým priestorom2) nad telesom R. (Množina je tvorená polynómami, pre ktoré je súčet osemnásobku hodnoty v nule a šesťnásobku hodnoty v jednotke rovný nule.)
je vektorovým priestorom2) nad telesom R. (Množina je tvorená polynómami, pre ktoré je súčet osemnásobku hodnoty v nule a šesťnásobku hodnoty v jednotke rovný nule.)
Riešenia.
- Uzavretosť operácie sčítania.
Pre ľubovoľné dva vektory, \vec{ b}=\left( b_1,b_2, \frac{b_1+b_2}{2}\right) \in V") pre ich súčet platí
pre ich súčet platí
+(b_1+b_2)}{2} \right) =")
+(a_2+b_2)}{2} \right) \in V") odkiaľ dostávame, že operácia + je uzavretá.
odkiaľ dostávame, že operácia + je uzavretá. - Postupujeme podobne ako v predchádzajúcom prípade.
- Operácia sčítania zrejme nie je uzavretá, lebo pre ľubovoľné dva vektory
, \vec{ b}=\left( 1-3b,b\right) \in V")
,a+b \right) \notin V") .
. -
Uvažujme dva ľubovoľné polynómy
, p_2(x)") , ktoré sú prvkami množiny . Ďalej majme polynóm
, ktoré sú prvkami množiny . Ďalej majme polynóm =p_1(x)+p_2(x)") ,
ktorý je ich súčtom. Pre polynómy
,
ktorý je ich súčtom. Pre polynómy , p_2(x)") platí
platí
+6p_1(1)=0") ,
,
+6p_2(1)=0") .
.
Sčítaním oboch rovníc získame![\small 8[p_1(0)+p_2(0)]+6[p_1(1)+p_2(1)]=0](https://lms.umb.sk/filter/tex/pix.php/6140b7c4140309d2fa7b03be3821de1e.png "\small 8[p_1(0)+p_2(0)]+6[p_1(1)+p_2(1)]=0") . Odkiaľ dostávame
. Odkiaľ dostávame
+6p_{12}(1)=0") ,
,
teda že polynóm") , čo je súčet ľubovoľných dvoch polynómov množiny , je opäť prvkom tejto množiny.
Tým sme dokázali uzavretosť sčítania vektorov.
Pokúste sa o grafickú interpretáciu vektorov, ak budeme brať do úvahy iba polynómy 1. stupňa alebo len polynómy 2. stupňa. Viete určiť počiatočné a koncové body týchto vektorov? Otvorte so applet Tu.
, čo je súčet ľubovoľných dvoch polynómov množiny , je opäť prvkom tejto množiny.
Tým sme dokázali uzavretosť sčítania vektorov.
Pokúste sa o grafickú interpretáciu vektorov, ak budeme brať do úvahy iba polynómy 1. stupňa alebo len polynómy 2. stupňa. Viete určiť počiatočné a koncové body týchto vektorov? Otvorte so applet Tu.
Poznámka.
V niektorých odborných publikáciách sa vektor označuje aj symbolom  .
.
V niektorých odborných publikáciách sa vektor
označuje aj symbolom .
__________________________________________________________________________________________
1) Pole je teleso s komutatívnou multiplikatívnou operáciou .
.
2) Pozrite si prácu [SBI] na stránke https://reseneulohy.cz/1356/vektorovy-prostor-ii
1) Pole je teleso s komutatívnou multiplikatívnou operáciou
.
2) Pozrite si prácu [SBI] na stránke https://reseneulohy.cz/1356/vektorovy-prostor-ii
\)
Lineárna závislosť vektorov
V predchádzajúcej kapitole sme pri definícii vektorového priestoru uviedli, že dvojica ") je Abelova komutatívna grupa.
To znamená, že binárna operácia "+" je komutatívna a asociatívna. Zároveň sme definovali násobenie skalárom.
Pomocou týchto dvoch operácií pripomenieme pojmy: lineárna kombinácia, závislosť a nezávislosť vektorov, ktoré sú dôležité a potrebné pri geometrickej manipulácii s vektormi.
je Abelova komutatívna grupa.
To znamená, že binárna operácia "+" je komutatívna a asociatívna. Zároveň sme definovali násobenie skalárom.
Pomocou týchto dvoch operácií pripomenieme pojmy: lineárna kombinácia, závislosť a nezávislosť vektorov, ktoré sú dôležité a potrebné pri geometrickej manipulácii s vektormi.
je Abelova komutatívna grupa.
To znamená, že binárna operácia "+" je komutatívna a asociatívna. Zároveň sme definovali násobenie skalárom.
Pomocou týchto dvoch operácií pripomenieme pojmy: lineárna kombinácia, závislosť a nezávislosť vektorov, ktoré sú dôležité a potrebné pri geometrickej manipulácii s vektormi.
Definícia (Lineárna kombinácia vektorov.)
Nech je daných vektorov
vektorov  . Každý vektor vyjadrený v tvare
. Každý vektor vyjadrený v tvare  , kde
, kde  sú reálne čísla, sa nazýva lineárna kombinácia vektorov
sú reálne čísla, sa nazýva lineárna kombinácia vektorov  .
.
Nech je daných
vektorov . Každý vektor vyjadrený v tvare , kde sú reálne čísla, sa nazýva lineárna kombinácia vektorov .
Príklady.





Definícia (Lineárna závislosť vektorov).
Vektory voláme lineárne závislé, ak rovnica
voláme lineárne závislé, ak rovnica

je splnená tak, že aspoň jedno z čísel je rôzne od nuly.
Vektory
voláme lineárne závislé, ak rovnica
je splnená tak, že aspoň jedno z čísel
je rôzne od nuly.
Veta.
Ak sú vektory lineárne závislé, tak aspoň jeden z nich je lineárnou kombináciou ostatných.
Ak sú vektory
lineárne závislé, tak aspoň jeden z nich je lineárnou kombináciou ostatných.
Definícia (Lineárna nezávislosť vektorov).
Vektory voláme lineárne nezávislé, ak rovnica
voláme lineárne nezávislé, ak rovnica

je splnená len pre .
.
Vektory
voláme lineárne nezávislé, ak rovnica
je splnená len pre
.
Príklady.



, \vec v_2=(1,1,0) , \vec v_3=(1,0,0)")
, \vec v_2=(1,0,-1) , \vec v_3=(1,1,-1)")
Po zavedení pojmov lineárna závislosť a lineárna nezávislosť môžeme pristúpiť k pojmom dimenzia a báza vektorového priestoru. Predtým musíme zadefinovať lineárny obal  vektorov a pridať niektoré vektorové axiómy. V ďalšom budeme uvažovať vektorový priestor
vektorov a pridať niektoré vektorové axiómy. V ďalšom budeme uvažovať vektorový priestor  nad telesom
nad telesom  .
.
vektorov a pridať niektoré vektorové axiómy. V ďalšom budeme uvažovať vektorový priestor nad telesom .
Definícia (Lineárny obal).
Nech je vektorový priestor nad telesom  a nech sú dané vektory
a nech sú dané vektory  . Potom množinu všetkých vektorov
. Potom množinu všetkých vektorov

nazývame lineárny obal vektorov alebo podpriestor
generovaný vektormi
alebo podpriestor
generovaný vektormi  .
Označujeme ho
.
Označujeme ho
![\small M =: \pmb[ \vec {v_1} , \cdot \vec {v_2}, \cdot \cdot \cdot, \vec {v_r}\pmb]](https://lms.umb.sk/filter/tex/pix.php/6f443251ecda4aa3b2c7a96c6bed5633.png "\small M =: \pmb[ \vec {v_1} , \cdot \vec {v_2}, \cdot \cdot \cdot, \vec {v_r}\pmb]") .
.
Ak platí![\small \pmb[\vec {v_1} , \cdot \vec {v_2}, \cdot \cdot \cdot, \vec {v_r}\pmb]= V](https://lms.umb.sk/filter/tex/pix.php/0757c2997462d41110cab82bed5f117f.png "\small \pmb[\vec {v_1} , \cdot \vec {v_2}, \cdot \cdot \cdot, \vec {v_r}\pmb]= V") , hovoríme, že vektory
, hovoríme, že vektory  generujú vektorový priestor .
generujú vektorový priestor .
Nech
je vektorový priestor nad telesom a nech sú dané vektory . Potom množinu všetkých vektorov
nazývame lineárny obal vektorov
alebo podpriestor
generovaný vektormi .
Označujeme ho
.
Ak platí
, hovoríme, že vektory generujú vektorový priestor .
Cvičenie.
-
Zistite, či vektor
") patrí do lineárneho obalu množiny
patrí do lineárneho obalu množiny ,\vec {y}=(1;0;2),\vec {z}=(-2;1;0)}\rbrace") .
.
Dokážte, že ľubovoľný vektor ∈ \mathbb R^3") leží v lineárnom obale množiny
leží v lineárnom obale množiny  pre ľubovoľnú trojicu
pre ľubovoľnú trojicu ") reálnych čísel.
reálnych čísel. -
Je daná množina
,(4,1,4),(3,2,2)}⊂\mathbb{\pmb Z^3_5}\rbrace") . Rozhodnite, či je vektor
. Rozhodnite, či je vektor ") prvkom lineárneho
obalu množiny
prvkom lineárneho
obalu množiny  .
.
Množina obsahuje trojice prvkov telesa zvyškových tried modulo 5.
zvyškových tried modulo 5. -
Zistite, či vektor
") patrí do lineárneho obalu množiny
patrí do lineárneho obalu množiny ,(2;1;0),(0;1;2),(5;2;-1)}\rbrace") . Ďalšie úlohy na
Tu. Príklad riešenia Tu.
. Ďalšie úlohy na
Tu. Príklad riešenia Tu.
Riešenie.
Cvičenie 1
Hľadajme koeficienty , pre ktoré platí rovnosť
, pre ktoré platí rovnosť
 = α (1, 2, 3) + β (1, 0, 2) + γ (−2, 1, 0)") .
.
Po úprave a porovnaní jednotlivých zložiek dostávame sústavu

Napríklad Gaussovou eliminačnou metódou (Otvor Tu) zistíme, že sústava má riešenie pre ľubovoľné .
.

Medzi týmito riešeniami je jedno triviálne pre . Všetky ostatné sú netriviálne. Príkladom netriviálneho riešenia pre trojicu
. Všetky ostatné sú netriviálne. Príkladom netriviálneho riešenia pre trojicu  je
je  . Potom platí
. Potom platí
2 (1, 2, 3) − 3 (1, 0, 2) − 4 (−2, 1, 0) = (7, 0, 0).
Existuje teda netriviálna lineárna kombinácia vektorov , ktorá je rovná nulovému vektoru. Teda vektory
, ktorá je rovná nulovému vektoru. Teda vektory  sú lineárne závislé.
Pozrite si prácu [Olšák, str. 24].
sú lineárne závislé.
Pozrite si prácu [Olšák, str. 24].
Cvičenie 2
Cvičenie 1
Hľadajme koeficienty
, pre ktoré platí rovnosť
.
Po úprave a porovnaní jednotlivých zložiek dostávame sústavu
Napríklad Gaussovou eliminačnou metódou (Otvor Tu) zistíme, že sústava má riešenie pre ľubovoľné
.
Medzi týmito riešeniami je jedno triviálne pre
. Všetky ostatné sú netriviálne. Príkladom netriviálneho riešenia pre trojicu je . Potom platí2 (1, 2, 3) − 3 (1, 0, 2) − 4 (−2, 1, 0) = (7, 0, 0).
Existuje teda netriviálna lineárna kombinácia vektorov
, ktorá je rovná nulovému vektoru. Teda vektory sú lineárne závislé.
Pozrite si prácu [Olšák, str. 24].Cvičenie 2
- Lineárny obal množiny priestoru
 je množina všetkých lineárnych kombinácií vektorov množiny s koeficientmi
z poľa. Teda stačí zistiť, či je možné vektor zapísať ako lineárnu kombináciu vektorov množiny .
je množina všetkých lineárnych kombinácií vektorov množiny s koeficientmi
z poľa. Teda stačí zistiť, či je možné vektor zapísať ako lineárnu kombináciu vektorov množiny . - Vektor patrí do lineárneho obalu množiny ak existujú prvky
 tak, aby
tak, aby
+b⋅(4,1,4)+c⋅(3,2,2)=(1,2,3)") .
.
Pre každú vektorovú zložku získame rovnicu. Trojica nasledujúcich rovníc tvorí sústavu, ktorú vyriešime. Pozor – sústavu riešime nad!
 Sčítaním prvej a druhej rovnice dostaneme
Sčítaním prvej a druhej rovnice dostaneme

lebo,3c+2c=0 (mod \; 5)") a sčítaním 3.r.+2.r. dostanme
a sčítaním 3.r.+2.r. dostanme

odkiaľ . Sústava má v poli riešenie. Vektor
. Sústava má v poli riešenie. Vektor ") je lineárnou
kombináciou vektorov množiny . Preto
je lineárnou
kombináciou vektorov množiny . Preto ![\small \vec {u} \in [M]](https://lms.umb.sk/filter/tex/pix.php/ae40e9d8f4c7112685c51629e2855347.png "\small \vec {u} \in [M]") .
.
\)
Dimenzia a báza
Nech je vektorový priestor nad telesom . Po zavedení pojmov lineárna závislosť a lineárna nezávislosť sme zadefinovali lineárny obal ako množinu všetkých lineárnych kombinácií
 kde sú vopred dané vektory priestoru .
kde sú vopred dané vektory priestoru .
Teraz môžeme pristúpiť k pojmom dimenzia a báza vektorového priestoru. Predtým musíme a pridať niektoré vektorové axiómy.
je vektorový priestor nad telesom . Po zavedení pojmov lineárna závislosť a lineárna nezávislosť sme zadefinovali lineárny obal ako množinu všetkých lineárnych kombinácií
sú vopred dané vektory priestoru .
Teraz môžeme pristúpiť k pojmom dimenzia a báza vektorového priestoru. Predtým musíme a pridať niektoré vektorové axiómy.
Axiómy dimenzie - rozmeru
- Nech vo vektorovom priestore existuje maximálne
 lineárne nezávislých vektorov, kde je prirodzené číslo.
Číslo nazývame dimenzia vektorového priestoru. Dimenziu značíme
lineárne nezávislých vektorov, kde je prirodzené číslo.
Číslo nazývame dimenzia vektorového priestoru. Dimenziu značíme  .
. - Každá
") - tica vektorov je už lineárne závislá.
- tica vektorov je už lineárne závislá. - Podmnožina vektorového priestoru je jeho báza práve vtedy, keď každý vektor
 možno práve jediným spôsobom
vyjadriť ako lineárnu kombináciu
možno práve jediným spôsobom
vyjadriť ako lineárnu kombináciu  navzájom rôznych vektorov množiny . Bázu značíme
navzájom rôznych vektorov množiny . Bázu značíme  .
. - Koeficienty
 nazývame súradnice vektora v vzhľadom na bázu . Označujeme
nazývame súradnice vektora v vzhľadom na bázu . Označujeme  a čítame „súradnice vektora
a čítame „súradnice vektora  vzhľadom na bázu .
vzhľadom na bázu .
Definícia (Báza vektorového priestoru).
Vektorový priestor nad telesom je konečno-rozmerný, ak existuje taká konečná
množina vektorov  , že platí
, že platí
![\small V =: \pmb[ \pmb {v_1} , \cdot \vec {v_2}, \cdot \cdot \cdot, \vec {v_n}\pmb]](https://lms.umb.sk/filter/tex/pix.php/aaaef6d58421723cc8c3c49bbeb375ec.png "\small V =: \pmb[ \pmb {v_1} , \cdot \vec {v_2}, \cdot \cdot \cdot, \vec {v_n}\pmb]") .
.
Báza je množina lineárne nezávislých vektorov,
ktorá generuje celý priestor .
lineárne nezávislých vektorov,
ktorá generuje celý priestor .
Vektorový priestor
nad telesom je konečno-rozmerný, ak existuje taká konečná
množina vektorov , že platí
.
Báza je množina
lineárne nezávislých vektorov,
ktorá generuje celý priestor . - Vektorový priestor o dimenzii nad telesom budeme označovať symbolom
") .
. - Vektorový priestor, ktorý sa skladá z práve jedného vektora (obsahuje len nulový vektor) označíme

Príklad.
Majme množinu") všetkých usporiadaných dvojíc reálnych čísel a operácie:
všetkých usporiadaných dvojíc reálnych čísel a operácie:
 \oplus (b_1,b_2 ) =(a_1+b_1,a_2+b_2)") - sčítanie po zložkách.
- sčítanie po zložkách.
 =(k.a_1,k.a_2)") - násobenie skalárom
- násobenie skalárom  ,
,
kde,\vec b=(b_1, b_2) \in V_2(\mathbb R)") sú ľubovoľné usporiadané dvojice reálnych čísel. Ukážte, že
množina
sú ľubovoľné usporiadané dvojice reálnych čísel. Ukážte, že
množina ") spolu s operáciami
spolu s operáciami  je 2-rozmerný vektorový priestor. Nájdite aspoň jednu jeho bázu.
je 2-rozmerný vektorový priestor. Nájdite aspoň jednu jeho bázu.
Majme množinu
všetkých usporiadaných dvojíc reálnych čísel a operácie:
- sčítanie po zložkách.
- násobenie skalárom ,
kde
sú ľubovoľné usporiadané dvojice reálnych čísel. Ukážte, že
množina spolu s operáciami je 2-rozmerný vektorový priestor. Nájdite aspoň jednu jeho bázu.
Pozrite si riešenie v samostatnom  súbore Tudim.
súbore Tudim.
súbore Tudim.
Poznámky.
-
Vektorový priestor
= \lbrace{(x, y); x, y \in \mathbb R}\rbrace") je reprezentovaný množinou všetkých orientovaných úsečiek,
ktoré sú určené ľubovoľnou usporiadanou dvojicou bodov v klasickej euklidovskej rovine.
je reprezentovaný množinou všetkých orientovaných úsečiek,
ktoré sú určené ľubovoľnou usporiadanou dvojicou bodov v klasickej euklidovskej rovine. -
Ak využijeme pravouhlý súradnicový systém s osami
 a počiatkom
a počiatkom  , tak jedno z umiestnení
vektora
, tak jedno z umiestnení
vektora ") môžeme znázorniť ako orientovanú úsečku
môžeme znázorniť ako orientovanú úsečku  , kde bod
, kde bod  má
súradnice
má
súradnice ![\small [a_1, a_2]](https://lms.umb.sk/filter/tex/pix.php/a8c5e147880c19b717c06f75af48db7b.png "\small [a_1, a_2]") . Všimnite si, že budeme rozlišovať zápis usporiadanej dvojice (okrúhle zátvorky) a súradnice bodu v
rovine (hranaté zátvorky).
. Všimnite si, že budeme rozlišovať zápis usporiadanej dvojice (okrúhle zátvorky) a súradnice bodu v
rovine (hranaté zátvorky). - V stredoškolskej matematike sa vektor priamo definuje ako orientovaná úsečka so šípkou smerujúcou od počiatku
![\small [0, 0]](https://lms.umb.sk/filter/tex/pix.php/387fd1febbdc2a38e9bb571f79ffc7ae.png "\small [0, 0]") súradnicového systému k
bodu
súradnicového systému k
bodu ![\small [a_1, a_2]](https://lms.umb.sk/filter/tex/pix.php/0289645246eb3d04427ee645350dd26c.png "\small [a_1, a_2]") . Šípkou sa označuje “orientácia” vektora
. Šípkou sa označuje “orientácia” vektora  .
. - V písomnom texte budeme vektor označovať symbolom
 .
.
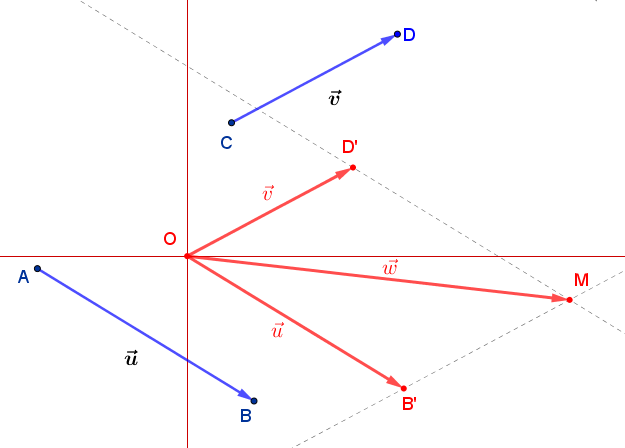
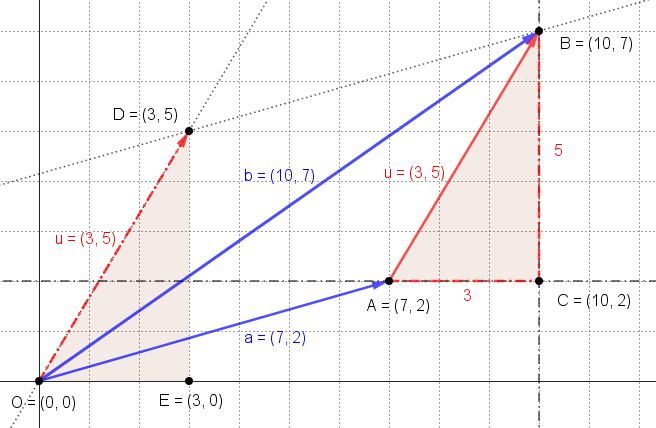
Nech sú dané dva vektory ,\vec b=(b_1, b_2) \in V_2(\mathbb R)") . V pravouhlom súradnicovom systéme usporiadané dvojice
. V pravouhlom súradnicovom systéme usporiadané dvojice ![\small [a_1, a_2], [b_1, b_2]](https://lms.umb.sk/filter/tex/pix.php/c702480000d26bb0ea91b2f13bff26db.png "\small [a_1, a_2], [b_1, b_2]") reprezentujú tiež dva body
reprezentujú tiež dva body  v euklidovskej rovine. Označme
v euklidovskej rovine. Označme  . Zrejme
vektor
. Zrejme
vektor  je súčtom vektorov
je súčtom vektorov  .
Uvažujme o trojuholníkoch
.
Uvažujme o trojuholníkoch  , ktoré prezentuje obrázok "Súčet vektorov".
Tieto trojuholníky sú zhodné:
, ktoré prezentuje obrázok "Súčet vektorov".
Tieto trojuholníky sú zhodné:  . V dôsledku tejto zhodnosti ľahko určíme súradnice súčtu vektorov.
. V dôsledku tejto zhodnosti ľahko určíme súradnice súčtu vektorov.
Pre súradnice vektora , ktorý je súčtom vektorov
, ktorý je súčtom vektorov ,\vec b=(b_1, b_2)") platí:
platí:
 určeného orientovanou úsečkou
určeného orientovanou úsečkou  , kde
, kde ![\small A = [a_1, a_2], B = [b_1, b_2]](https://lms.umb.sk/filter/tex/pix.php/722953470976b26fb531d9b2cc406b86.png "\small A = [a_1, a_2], B = [b_1, b_2]") určíme ako rozdiely súradníc bodov
určíme ako rozdiely súradníc bodov  tj.
tj. ") . Vytvorili sme operáciu: odčítavanie bodov, pričom:
. Vytvorili sme operáciu: odčítavanie bodov, pričom:
Rozdielom dvoch bodov je vektor.
Vektor určený orientovanou úsečkou môžeme zapísať aj ako
môžeme zapísať aj ako  .
.
. V pravouhlom súradnicovom systéme usporiadané dvojice
reprezentujú tiež dva body v euklidovskej rovine. Označme . Zrejme
vektor je súčtom vektorov .
Uvažujme o trojuholníkoch , ktoré prezentuje obrázok "Súčet vektorov".
Tieto trojuholníky sú zhodné: . V dôsledku tejto zhodnosti ľahko určíme súradnice súčtu vektorov.Pre súradnice vektora
, ktorý je súčtom vektorov platí:
=\left| OE \right| =\left| x(A)-x(B) \right|,")
=\left| ED \right| =\left| y(A)-y(B) \right|.")
 určeného orientovanou úsečkou , kde určíme ako rozdiely súradníc bodov tj. . Vytvorili sme operáciu: odčítavanie bodov, pričom:
určeného orientovanou úsečkou , kde určíme ako rozdiely súradníc bodov tj. . Vytvorili sme operáciu: odčítavanie bodov, pričom:
Rozdielom dvoch bodov je vektor.
Vektor určený orientovanou úsečkou
môžeme zapísať aj ako .
Cvičenie.
Daný je vektorový priestor
![\small W=[(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)]⊂\mathbb{\vec Z^4_7}](https://lms.umb.sk/filter/tex/pix.php/7a13d496af8559e1bc0ab5ec8ce51d77.png "\small W=[(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)]⊂\mathbb{\vec Z^4_7}") .
.
1. Nájdite nejakú bázu priestoru
priestoru  a určite jeho dimenziu.
a určite jeho dimenziu.
2. Určete súradnice vektora vzhľadom k báze , ak
vzhľadom k báze , ak
") .
.
Priestor obsahuje štvorice prvkov telesa  zvyškových tried modulo 7.
zvyškových tried modulo 7.
Daný je vektorový priestor
.
1. Nájdite nejakú bázu
priestoru a určite jeho dimenziu.
2. Určete súradnice vektora
vzhľadom k báze , ak
.
Priestor
obsahuje štvorice prvkov telesa zvyškových tried modulo 7.
Poznámka k cvičeniu.
Zápis ") hovorí, že súradnice vektora
hovorí, že súradnice vektora  voči kanonickej báze sú
voči kanonickej báze sú ") .
Súradnice vektora voči kanonickej báze sú koeficienty lineárnej kombinácie vektorov kanonickej bázy dávajúcej vektor , tj.
.
Súradnice vektora voči kanonickej báze sú koeficienty lineárnej kombinácie vektorov kanonickej bázy dávajúcej vektor , tj.
+2⋅(0,1,0,0)+1⋅(0,0,1,0)+1⋅(0,0,0,1)= (1,2,1,1)") .
.
Súradnice vektora voči kanonickej báze predstavujú priamo zložky") vektora .
vektora .
hovorí, že súradnice vektora voči kanonickej báze sú .
Súradnice vektora voči kanonickej báze sú koeficienty lineárnej kombinácie vektorov kanonickej bázy dávajúcej vektor , tj.
.
Súradnice vektora voči kanonickej báze predstavujú priamo zložky
vektora .
Riešenie cvičenia.
- Máme nájsť bázu vektorového priestoru , ktorý je daný ako lineárny obal množiny generátorov
![\small [(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)]](https://lms.umb.sk/filter/tex/pix.php/d31c0a1c182e55949ca3d63120bfc751.png "\small [(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)]") .
.
Aby množina vektorov bola bázou, musí byť ešte lineárne nezávislá. - Ak teda nájdeme bázu
 musí pre súradnice vektora platiť
musí pre súradnice vektora platiť
=x_1⋅\vec b_1+x_2⋅\vec b_2+x_3⋅\vec b_3+x_4⋅\vec b_4") .
.
Z tejto vektorovej rovnice vypočítame súradnice . Najskôr treba upraviť maticu
. Najskôr treba upraviť maticu
")
na trojuholníkový tvar (Pozor, pracujeme nad telesom resp. poľom zvyškových tried modulo 7!)
Po prvej iterácii ") dostanme
dostanme
") .
.
Urobte ešte dve iterácie tak, aby ste dostali maticu
") .
.
- Hodnosť matice je rovná 2, preto pre lineárny obal platí
![\small [(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)] =[(6,1,0,2),(0,5,4,5)]](https://lms.umb.sk/filter/tex/pix.php/68e5861d87aae11fa845fd68ef4e5232.png "\small [(6,1,0,2),(2,3,4,1),(5,1,2,3),(3,0,1,4)] =[(6,1,0,2),(0,5,4,5)]") .
.
Dimenzia je rovná 2 a aspoň jedna báza je určená lineárne nezávislou množinou vektorov,(0,5,4,5)\right\rangle")
- Určte súradnice vektora
") v tejto báze. Výpočet súradníc nájdete v "Sbírka řešených úloh" - dostupné Tu.
v tejto báze. Výpočet súradníc nájdete v "Sbírka řešených úloh" - dostupné Tu.
Veta (Existencia bázy).
Každý netriviálny konečno generovaný vektorový priestor má aspoň jednu konečnú bázu.
Každý netriviálny konečno generovaný vektorový priestor má aspoň jednu konečnú bázu.
Z vlastností hodnosti matíc ľahko odvodíme tvrdenie. Dôkaz nájdete napríklad v práci [HASa, 2020 ], str. 45-46].
\)
Skalárny súčin
Definícia, vlastnosti (zopakovanie z Lineárnej algebry).
Definícia (Skalárny súčin).
Nech") je vektorový priestor nad poľom reálnych čísel. Zobrazenie
je vektorový priestor nad poľom reálnych čísel. Zobrazenie  (resp. operáciu
(resp. operáciu  )
)
 :
: 
nazveme skalárny súčin na") , ak pre každé
, ak pre každé  sú splnené tieto podmienky:
sú splnené tieto podmienky:
Nech
je vektorový priestor nad poľom reálnych čísel. Zobrazenie (resp. operáciu )
:
nazveme skalárny súčin na
, ak pre každé sú splnené tieto podmienky:
-

 \bullet \vec c=\vec a \bullet \vec c + \vec b \bullet \vec c")
 \bullet \vec b = r (\vec a \bullet \vec b)")
- pre každý vektor
 je
je  .
.
Poznámky.
- Vlastnosti (ii) a (iii) nastavujú požiadavku na linearitu v prvej zložke. Vlastnosť (i) žiada symetriu, tj linearita prvej zložky sa prenáša do zložky druhej. Tieto vlastnosti má symetrická bilineárna forma. Viac o bilineárnych formách nájdete Tu.
- Vlastnosť (iv) hovorí, že forma musí byť pozitívne definitívna.
- Skalárny súčin na reálnom priestore je teda symetrická pozitívne definitná bilineárna forma na danom priestore.
- Pre skalárny súčin na reálnom priestore sa okrem označenia
 používa:
používa: - symbol pre funkciu
") ako zobrazenie ,
ako zobrazenie , - jednoduchý symbol pre násobenie
 ,
, - alebo len usporiadaná dvojica
") .
.
- symbol pre funkciu
Definícia.
Definícia normy a uhla vektorov
Definícia normy a uhla vektorov
- Norma vektora
Nech je reálny vektorový priestor so skalárnym súčinom . Normou vektora  rozumieme číslo:
rozumieme číslo:
}") .
.
Inak povedané, norma vektora je odmocnina zo skalárneho súčinu tohto vektora samého so sebou.
Vektor sa nazýva normovaný (jednotkový), ak platí  .
. - Vektory
 sú ortogonálne (na seba kolmé), ak ich skalárny súčin je rovný nule (nulovému prvku telesa
sú ortogonálne (na seba kolmé), ak ich skalárny súčin je rovný nule (nulovému prvku telesa  ).
). - Uhol vektorov
Nech je reálny vektorový priestor so skalárnym súčinom . Uhlom nenulových vektorov  rozumieme
číslo
rozumieme
číslo  , pre ktoré platí:
, pre ktoré platí:
}{\|\vec u\| \|\vec v\|}}") ,
,
kde .
.
Vážený skalárny súčin je oproti „stredoškolskému skalárnemu súčinu“ oveľa všeobecnejší. Stredoškolsky definovaný skalárny súčin (tiež nazývaný aj ako euklidovský skalárny súčin) na priestore ") je zavedený nasledovne. Ak
je zavedený nasledovne. Ak ![\small \vec a = [a_1, a_2, a_3], \vec b = [b_1, b_2, b_3]](https://lms.umb.sk/filter/tex/pix.php/7dfc37c6c5f00445543fb1ebe52bb4e0.png "\small \vec a = [a_1, a_2, a_3], \vec b = [b_1, b_2, b_3]") , tak
, tak

Presvedčte sa, že stredoškolsky definovaný skalárny súčin spĺňa podmienky uvedené v definícii, že je to symetrická pozitívne definitná bilineárna forma.
Definícia skalárneho súčinu môže mať rôzne podoby. Napríklad na množine spojitých funkcií intervalu ⟨a,b⟩ možno uvažovať skalárny súčin vo forme
= \int_{a}^{b}{f(x)g(x)} dx.")
je zavedený nasledovne. Ak , tak
Presvedčte sa, že stredoškolsky definovaný skalárny súčin spĺňa podmienky uvedené v definícii, že je to symetrická pozitívne definitná bilineárna forma.
Definícia skalárneho súčinu môže mať rôzne podoby. Napríklad na množine spojitých funkcií intervalu ⟨a,b⟩ možno uvažovať skalárny súčin vo forme
Cvičenie.
-
Ukážte, že operácia definovaná na
 takto:
takto:
 = x_1 y_1+x_2 y_2+x_2 y_3+x_3 y_2+2x_3 y_3") .
.
pre![\small \vec x = [x_1, x_2, x_3], \vec y = [y_1, y_2, y_3] \in \mathbb R^3](https://lms.umb.sk/filter/tex/pix.php/597a8605691f40f512d228c67a2de47b.png "\small \vec x = [x_1, x_2, x_3], \vec y = [y_1, y_2, y_3] \in \mathbb R^3") spĺňa podmienky skalárneho súčinu.
spĺňa podmienky skalárneho súčinu. - Overte, či sú vektory
, \vec y = (2,1,-1)") ortogonálne.
ortogonálne. - Určte ortogonálny doplnok podpriestoru
\}") . Ortogonálnym doplnkom podpriestoru priestoru je množina všetkých vektorov z ,
ktoré sú kolmé na všetky vektory z .
. Ortogonálnym doplnkom podpriestoru priestoru je množina všetkých vektorov z ,
ktoré sú kolmé na všetky vektory z .
Riešenie.
Dosadením súradníc vektorov![\small \vec a = [a_1, a_2, a_3], \vec b = [b_1, b_2, b_3], \vec c = [c_1, c_2, c_3] \in \mathbb R^3](https://lms.umb.sk/filter/tex/pix.php/49544bc4c8d8f98ea342ed285abf7962.png "\small \vec a = [a_1, a_2, a_3], \vec b = [b_1, b_2, b_3], \vec c = [c_1, c_2, c_3] \in \mathbb R^3") do definície skalárneho súčinu,
ľahko overíme, že jednotlivé podmienky v definícii sú splnené. Pozrite si riešenie Tu.
do definície skalárneho súčinu,
ľahko overíme, že jednotlivé podmienky v definícii sú splnené. Pozrite si riešenie Tu.
Dosadením súradníc vektorov
do definície skalárneho súčinu,
ľahko overíme, že jednotlivé podmienky v definícii sú splnené. Pozrite si riešenie Tu.
Veta (Ďalšie vlastnosti skalárneho súčinu).
Nech ") je vektorový priestor so skalárnym súčinom, nechaj
je vektorový priestor so skalárnym súčinom, nechaj  . Potom
. Potom
je vektorový priestor so skalárnym súčinom, nechaj . Potom
 = \vec w . \vec u+ \vec w . \vec v") . Dokážte toto tvrdenie.
. Dokážte toto tvrdenie.
Dôsledok: Pre skalárny súčin platí aj zovšeobecnený distributívny zákon. = r.(\vec u.\vec v)")
 . Dokážte tieto tvrdenia.
. Dokážte tieto tvrdenia.
Dôsledok: Pre skalárny súčin platí .
.
Veta (Určenie euklidovského skalárneho súčinu).
Nech je ortonormálna báza vektorového priestoru a
nech
je ortonormálna báza vektorového priestoru a
nech , \vec b = (b_1, b_2, . . . ,b_n)") sú súradnice vektorov
sú súradnice vektorov  v báze
v báze  . Potom
. Potom
 = (a_1.b_1+ a_2.b_2+ . . . +a_n.b_n)") .
.
Nech
je ortonormálna báza vektorového priestoru a
nech sú súradnice vektorov v báze . Potom
.
Dôkaz.
Nech, \vec b = (b_1\vec u_1+ b_2.\vec u_2+ . . . +b_n\vec u_n)") sú súradnice vektorov v báze . Definujme euklidovský skalárny súčin ako súčin mnohočlenov
sú súradnice vektorov v báze . Definujme euklidovský skalárny súčin ako súčin mnohočlenov
 =\\=a_1.b_1\vec u_1\vec u_1+ a_1.b_2\vec u_1\vec u_2+ . . . +a_1.b_n\vec u_1\vec u_n+\\ +\;a_2.b_1\vec u_2\vec u_1+ a_2.b_2\vec u_2\vec u_2+ . . . +a_2.b_n\vec u_2\vec u_n+\\ +\;... \\ +\;a_n.b_1\vec u_n\vec u_1+ a_n.b_2\vec u_n\vec u_2+ . . . +a_n.b_n\vec u_n\vec u_n}") .
.
Využitím symetrie, distributívnosti a linearity skalárneho súčinu, vzťahov ;
; a využitím komutatívnosti, distributívnosti násobenia a sčítania reálnych čísel dostaneme požadovaný výsledok.
a využitím komutatívnosti, distributívnosti násobenia a sčítania reálnych čísel dostaneme požadovaný výsledok.
Nech
sú súradnice vektorov v báze . Definujme euklidovský skalárny súčin ako súčin mnohočlenov.
Využitím symetrie, distributívnosti a linearity skalárneho súčinu, vzťahov
; a využitím komutatívnosti, distributívnosti násobenia a sčítania reálnych čísel dostaneme požadovaný výsledok.
Vektorový priestor s vyššie definovaným skalárnym súčinom nazývame Euklidovský (vektorový) priestor
s vyššie definovaným skalárnym súčinom nazývame Euklidovský (vektorový) priestor
Riešené príklady - prezentácia Tu.
prezentácia Tu.\)
Súradnice v báze
Bázu vektorového priestoru ") tvorí ľubovoľná -tica lineárne nezávislých vektorov
tvorí ľubovoľná -tica lineárne nezávislých vektorov  .
.
tvorí ľubovoľná -tica lineárne nezávislých vektorov .
- Bázu , ktorú tvoria -tice reálnych čísel
,\vec{e_2}=(0,1,0,...,0), ...,\vec{e_n}=(0,0,...,1))") ,
,
budeme nazývať jednotková (ortonormálna) báza. Dokážte, že vektory sú nezávislé.
sú nezávislé.
- Ľubovoľný vektor
: \vec v=(v_1,v_2,...,v_n") je lineárnou kombináciou vektorov
je lineárnou kombináciou vektorov  , lebo platí
, lebo platí
 =v_1 \cdot (1,0,...,0) \oplus v_2 \cdot (0,1,0,...,0) \oplus v_n \cdot (0,0,...,1)")
Definícia (Súradnice vektora v báze).
Nech je jednotková báza a  je iná báza vektorového
priestoru .
je iná báza vektorového
priestoru .
Nech
je jednotková báza a je iná báza vektorového
priestoru .
- Čísla
 nazývame súradnice vektora
nazývame súradnice vektora  v jednotkovej báze
v jednotkovej báze ") a zapisujeme ako usporiadanú n-ticu čísel
a zapisujeme ako usporiadanú n-ticu čísel}=v_1 \cdot (1,0,...,0) \oplus v_2 \cdot (0,1,0,...,0) \oplus v_n \cdot (0,0,...,1)") .
. - Súradnice
 v báze budeme zapisovať pomocou dolného indexu
v báze budeme zapisovať pomocou dolného indexu
}_{({a_1},{a_2}, ...,{a_n} )}=w_1 \cdot \vec{a_1} \oplus w_2 \cdot\vec{a_2} \oplus ...\oplus w_n \cdot \vec{a_n}") .
.
Príklad.
- Nech
,\;\vec b(2, 3, 4),\;\vec c (1, 2, 3))") je báza priestoru
je báza priestoru ") .
Nájdite vektor vo , ktorého súradnice vzhľadom k báze
.
Nájdite vektor vo , ktorého súradnice vzhľadom k báze  sú
sú ") .
. - ♥ Nájdite súradnice vektora
") vzhľadom k báze .
vzhľadom k báze .
Riešenie.
- Zrejme
.(1, 1, 2) + 3(2, 3, 4) + 2.(1, 2, 3) = (7, 12, 16)") .
.
Toto sú súradnice vektora vzhľadom k jednotkovej báze. Je dôležité dodržať poradie prvkov bázy . - Určiť súradnice vzhľadom k báze znamená vektor
 vyjadriť ako lineárnu kombináciu prvkov bázy .
Opäť treba dať pozor na poradie prvkov bázy. Musíme nájsť
vyjadriť ako lineárnu kombináciu prvkov bázy .
Opäť treba dať pozor na poradie prvkov bázy. Musíme nájsť  , pre ktoré platí:
, pre ktoré platí:
( i) + s.(2, 3, 4) + t.(1, 2, 3)") resp.
resp.
( ii): = r.(1, 1, 2) + s.(2, 3, 4) + t.(1, 2, 3)") .
.
Úlohu môžeme riešiť ako sústavu rovníc (vyriešte úlohu týmto spôsobom).
(iii):
alebo rovnosť (ii) prepíšeme na maticový tvar (vektory bázy zapisujeme do stĺpcov! Prečo?) takto:
(iv): \cdot \left(\begin{array}{ccc} 5 \\ -1 \\ 9 \end{array}\right) =
\left(\begin{array}{ccc} 1&2&1 \\ 1&3&2 \\ 2&4&3\end{array}\right) \cdot \left(\begin{array}{ccc} r \\ s \\ t \end{array}\right)")
Vyjadriť vektor^T") (transponovaný zápis vektora) môžeme tak, že obe strany rovnice (iv) vynásobíme zľava inverznou maticou
(transponovaný zápis vektora) môžeme tak, že obe strany rovnice (iv) vynásobíme zľava inverznou maticou
") .
.
Inverznú maticu určíme napríklad pomocou programu GeoGebra, otvorte si applet "inverzná matica" Tu. Po vynásobení zľava obidvoch strán rovnice (iv) dostaneme
 \cdot \left(\begin{array}{ccc} 5 \\ -1 \\ 9 \end{array}\right) = \left(\begin{array}{ccc} r \\ s \\ t \end{array}\right)") .
.
Riešením je vektor^T =(16, -5, -1)^T") . Otvorte si výpočty Matrix calculator a v Matrix calculator
Tu a v GeoGebre
Tu.
. Otvorte si výpočty Matrix calculator a v Matrix calculator
Tu a v GeoGebre
Tu.
Nasledujúci applet demonštruje určenie súradníc vektora ") v báze
v báze  ;(1,2,1);(-1, 1,0)") Riešením sú súradnice
Riešením sú súradnice ") . Vypočítajte ich pomocou maticového tvaru, pričom využite program Matrix calculator.
. Vypočítajte ich pomocou maticového tvaru, pričom využite program Matrix calculator.
v báze
Riešením sú súradnice 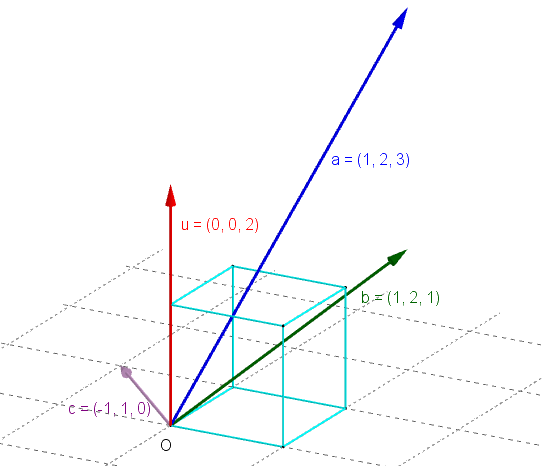 . Vypočítajte ich pomocou maticového tvaru, pričom využite program Matrix calculator.
. Vypočítajte ich pomocou maticového tvaru, pričom využite program Matrix calculator.
♥ Príklad.
Je dané lineárne zobrazenie , ktoré jednotkovú bázu
, ktoré jednotkovú bázu ") zobrazí na bázu
zobrazí na bázu
,\;\vec b(2, 3, 4),\;\vec c (1, 2, 3))")
priestoru. Nájdite obraz ") vektora
vektora ") v tomto zobrazení.
v tomto zobrazení.
Je dané lineárne zobrazenie
, ktoré jednotkovú bázu zobrazí na bázu
priestoru
. Nájdite obraz vektora v tomto zobrazení.
Poznámky.
- Nech
 sú vektorové priestory nad telesom
sú vektorové priestory nad telesom  . Zobrazenie
. Zobrazenie  sa nazýva lineárne zobrazenie, ak je
splnené nasledovné:
sa nazýva lineárne zobrazenie, ak je
splnené nasledovné:
&\varphi(\vec u+\vec v)=\varphi(\vec u)+\varphi(\vec v)\\(\textrm{ii})&\varphi(\alpha\cdot\vec u)=\alpha\cdot\varphi(\vec u)\end{array}")
kde a
a  .
. - Aký je rozdiel medzi predchádzajúcim príkladom a týmto príkladom. V obidvoch príkladoch ide o zobrazenie bázy vektorového priestoru na inú bázu toho istého vektorového priestoru. Ale v predchádzajúcom príklade nejde o lineárne zobrazenie.
Riešenie.
- Využitím vlastností lineárneho zobrazenia.
Vektor vyjadríme ako lineárnu kombináciu  vektorov jednotkovej bázy. Keďže zobrazenie zobrazenie
vektorov jednotkovej bázy. Keďže zobrazenie zobrazenie  je lineárne, tak musí platiť
je lineárne, tak musí platiť

![\small =\varphi[ 5\vec{e_1})-1(\vec{e_2})+9(\vec{e_3}) ]](https://lms.umb.sk/filter/tex/pix.php/cd03d29993f1d054825e7f80121467a8.png "\small =\varphi[ 5\vec{e_1})-1(\vec{e_2})+9(\vec{e_3}) ]")
![\small = \varphi[5.(1,0,0) + (-1)(0,1,0) + 9.(0,0, 1)]](https://lms.umb.sk/filter/tex/pix.php/915591b915a760ee30ed194304ba7e21.png "\small = \varphi[5.(1,0,0) + (-1)(0,1,0) + 9.(0,0, 1)]")
-1\varphi(\vec{e_2})+9\varphi(\vec{e_3})") .
.
Po úprave dostaneme:
 -1.(2, 3, 4) + 9.(1, 2, 3)") .
.
Po roznásobení a postupným sčítaním po zložkách dostaneme, že riešením je vektor =(12, 20, 33)") .
. - S použitím programu Matrix calculator si môžete prezrieť Tu.
\)
Vektorový a vonkajší súčin
Vonkajší súčin vektorov vo  a Vektorový súčin dvoch vektorov vo
a Vektorový súčin dvoch vektorov vo 
vektorov vo a Vektorový súčin dvoch vektorov vo
Definícia (Vonkajší súčin).
Nech je orientovaný vektorový priestor a nech  je jeho kladná ortonormálna báza. Pod vonkajším súčinom
vektorov
je jeho kladná ortonormálna báza. Pod vonkajším súčinom
vektorov  rozumieme nasledujúci determinant:
rozumieme nasledujúci determinant:

kde v riadkoch tohto determinantu sú súradnice vektorov vzhľadom na bázu
vzhľadom na bázu  ,
,
tj., i \in \{1, 2, \dots, n\}") .
.
Nech
je orientovaný vektorový priestor a nech je jeho kladná ortonormálna báza. Pod vonkajším súčinom
vektorov rozumieme nasledujúci determinant:
kde v riadkoch tohto determinantu sú súradnice vektorov
vzhľadom na bázu ,
tj.
.
Vonkajší súčin vektorov  budeme označovať:
budeme označovať: ![\small [\mathbf{v}_1, \mathbf{v}_2, \dots, \mathbf{v}_n]_B](https://lms.umb.sk/filter/tex/pix.php/694b5e5746ffe864553248f1102d5ce3.png "\small [\mathbf{v}_1, \mathbf{v}_2, \dots, \mathbf{v}_n]_B") .
.
budeme označovať: .
Poznámky K orientácii bázy si pozrite výklad v samostatnom súbore "Kladná ortonormálna báza" Tu.
- Geometrický význam vonkajšieho súčinu vektorov od
 a až po :
a až po :
- Nech je kladná báza vektorového priestoru a nech vektory
 tvoria rovnobežník s orientáciou
podľa . Potom vonkajší súčin
tvoria rovnobežník s orientáciou
podľa . Potom vonkajší súčin ![\small [\vec {v},\vec {w}]](https://lms.umb.sk/filter/tex/pix.php/73276d1d84f572e0900dd84334f3a461.png "\small [\vec {v},\vec {w}]") vyjadruje orientovanú plochu rovnobežníka tvoreného
vektormi .
vyjadruje orientovanú plochu rovnobežníka tvoreného
vektormi . - Nech je kladná báza vektorového priestoru a nech vektory
 tvoria rovnobežnosten s orientáciou podľa
tvoria rovnobežnosten s orientáciou podľa  . Potom vonkajší súčin
. Potom vonkajší súčin ![\small [\vec {u},\vec {v},\vec {w}]](https://lms.umb.sk/filter/tex/pix.php/31a82ba42fdfe44ab466523ff78eae50.png "\small [\vec {u},\vec {v},\vec {w}]") vyjadruje objem rovnobežnostena tvoreného týmito vektormi.
vyjadruje objem rovnobežnostena tvoreného týmito vektormi.
- Nech
-
Vo vektorovom priestore okrem vonkajšieho súčinu, ktorého výsledkom je reálne číslo predstavujúce objem, môžeme definovať operáciu "vektorový súčin". Výsledkom tejto operácie bude
vektor
Definícia (Vektorový súčin).
Vektorový súčin dvoch vektorov") je definovaný ako vektor kolmý k vektorom
je definovaný ako vektor kolmý k vektorom  , ktorého veľkosť
je rovná ploche kosodĺžnika, ktorý oba vektory vytvárajú. Zapisujeme
, ktorého veľkosť
je rovná ploche kosodĺžnika, ktorý oba vektory vytvárajú. Zapisujeme
 ,
,
kde je uhol zvieraný vektormi s vlastnosťou
je uhol zvieraný vektormi s vlastnosťou  a
a  je jednotkový
vektor kolmý k nim.
je jednotkový
vektor kolmý k nim.
Vektorový súčin dvoch vektorov
je definovaný ako vektor kolmý k vektorom , ktorého veľkosť
je rovná ploche kosodĺžnika, ktorý oba vektory vytvárajú. Zapisujeme
,
kde
je uhol zvieraný vektormi s vlastnosťou a je jednotkový
vektor kolmý k nim.
- Vektorový súčin vektorov budeme symbolicky označovať
 alebo
alebo  .
. - Vektorový súčin vektorov je definovaný pre 3-rozmerný Euklidovský priestor!
Existujú rôzne metódy výpočtu vektorového súčinu dvoch vektorov
") a
a ") v trojrozmernom priestore. Tu sú najbežnejšie metódy:
v trojrozmernom priestore. Tu sú najbežnejšie metódy:
a v trojrozmernom priestore. Tu sú najbežnejšie metódy:
Determinantová metóda (priama metóda pomocou determinantov).
Vektorový súčin dvoch vektorov a sa vypočítame ako determinant matice so základnými vektormi  a komponentami vektorov
a komponentami vektorov  :
:
a sa vypočítame ako determinant matice so základnými vektormi a komponentami vektorov :

Tento determinant sa rozvinie do:
 Výsledok je:
Výsledok je:
 \vec{i} - (a_1 b_3 - a_3 b_1) \vec{j} + (a_1 b_2 - a_2 b_1) \vec{k}.") Konečná forma:
Konečná forma:
.")
Veta.
Vektorový súčin možno definovať aj bez pomoci uhla, ktorý oba vektory určujú. Nech sú dané vektory; \vec {b}= ( b_1,b_2,b_3)") . Potom
zložky vektora
. Potom
zložky vektora  vektorového súčinu
vektorového súčinu  možno určiť ako
možno určiť ako

Vektorový súčin možno definovať aj bez pomoci uhla, ktorý oba vektory určujú. Nech sú dané vektory
. Potom
zložky vektora vektorového súčinu možno určiť ako
Vektorový súčin je úzko spojený s priesečníkom dvoch priamok. Pozrite si príspevok k téme Aplikácie vektorového súčinu, ktorý je dostupný
Tu.
V moderných programovacích jazykoch, ako Python alebo GeoGebra, MATLAB, sú k dispozícii vstavané funkcie na výpočet vektorového súčinu, ktoré umožňujú rýchly a presný výpočet.
V moderných programovacích jazykoch, ako Python alebo GeoGebra, MATLAB, sú k dispozícii vstavané funkcie na výpočet vektorového súčinu, ktoré umožňujú rýchly a presný výpočet.
Pomôcka na výpočet súradníc vektora .
Zapíšeme si súradnice vektorov do zákrytov pod seba, prvý riadok budú súradnice vektora a pridáme ešte raz jeho
prvú a druhú súradnicu. V druhom riadku urobím to isté s vektorom
a pridáme ešte raz jeho
prvú a druhú súradnicu. V druhom riadku urobím to isté s vektorom  . Dostaneme schému
. Dostaneme schému
 .
.
Teraz určíme súradnice vektora - krížové násobenie:
") .
.
.
Zapíšeme si súradnice vektorov do zákrytov pod seba, prvý riadok budú súradnice vektora
a pridáme ešte raz jeho
prvú a druhú súradnicu. V druhom riadku urobím to isté s vektorom . Dostaneme schému
.
Teraz určíme súradnice vektora
- krížové násobenie:
.
Poznámky.
- Pre obsah trojuholníka
 je známy vzorec
je známy vzorec  , kde
, kde  . Porovnaním s definíciou
vektorového súčinu, môžeme písať
. Porovnaním s definíciou
vektorového súčinu, môžeme písať  .
. - Zrejme pre obsah rovnobežníka
 bude platiť:
bude platiť:  .
. - Pomocou zmiešaného súčinu troch vektorov môžeme vypočítať objem rovnobežnostena, viac nájdete v priloženom súbore "Výpočet objemu rovnobežnostena". Súbor predstavuje výber z práce Vodičková, V.: Aplikácie vektorového súčinu.
Cvičenie.
- Zistite, či zobrazenie (operácia)

 je
skalárnym súčinom, ak
je
skalárnym súčinom, ak
, (x_2,y_2)) =x_1y_1-3x_1y_2-3x_2y_1+10y_1y_2") ,
,, (x_2,y_2)) =x_1y_1-3x_1y_2-3x_2y_1+10x_2y_2") .
.
- Zistite aký uhol zvierajú jednotkové vektory
 , ak
, ak  sú na seba kolmé vektory.
sú na seba kolmé vektory. - Vypočítajte obsah rovnobežníka , ak poznáte súradnice troch jeho vrcholov:
![\small A[5; 1; 4], B[−1; −2; 6], C[2; 3; −2]](https://lms.umb.sk/filter/tex/pix.php/19ed960c9979573457cd0ef9b18a7051.png "\small A[5; 1; 4], B[−1; −2; 6], C[2; 3; −2]") . Vytvorte si model v GeoGebre.
. Vytvorte si model v GeoGebre. - Vypočítajte veľkosť vektora
 , ak
, ak ||= \frac{2}{3} \pi") .
.
\)
Cauchy-Schwarzova nerovnosť
Definície - norma vektora, uhol vektorov na reálnom vektorovom priestore so skalárnym súčinom ") .
.
so skalárnym súčinom .
- Pod normou (veľkosťou) vektora rozumieme druhú odmocninu skalárneho súčinu vektora
 samého so sebou.
Normu vektora budeme označovať
samého so sebou.
Normu vektora budeme označovať  , teda
, teda

- Uhlom nenulových vektorov
") rozumieme číslo
rozumieme číslo  , pre ktoré platí
, pre ktoré platí
}{∥\vec u∥ .∥\vec v||}}") ,
,
Ku korektnosti definície je nutné ukázať, že}{∥\vec u∥ .∥\vec v∥}} \leq \small {1}") . Dokážte to s využitím Cauchy-Schwarzovej nerovnosti.
. Dokážte to s využitím Cauchy-Schwarzovej nerovnosti.
Tvrdenia.
- Cauchy-Schwarzova nerovnosť
Pre ľubovoľné dva vektory platí
| ≤ ∥\vec u∥ . ∥\vec v∥") ,
,
pričom rovnosť nastane práve vtedy, keď vektory sú lineárne závislé (tj. jeden z nich je násobkom toho druhého).
sú lineárne závislé (tj. jeden z nich je násobkom toho druhého). - Nulový vektor
 je kolmý na ľubovoľný vektor
je kolmý na ľubovoľný vektor  .
Vektory štandardnej bázy
.
Vektory štandardnej bázy  sú navzájom kolmé.
sú navzájom kolmé.
Dôkaz - Cauchy-Schwarzovej nerovnosti.
- Pre lineárne závislé vektory musí existovať nenulové reálne číslo
 , pre ktoré platí
, pre ktoré platí  .
Ak sú vektory nezávislé tak, pre každé nenulové reálne číslo vektor
.
Ak sú vektory nezávislé tak, pre každé nenulové reálne číslo vektor  je nenulový. Zrejme druhá mocnina jeho normy je
je nenulový. Zrejme druhá mocnina jeho normy je  a nie je rovná nule. Podľa definície normy rozpíšeme ľavú stranu nerovnosti ako
a nie je rovná nule. Podľa definície normy rozpíšeme ľavú stranu nerovnosti ako
.(\vec u-a\vec v)>0")
Skalárny súčin je symetrický a distributívny, preto po úprave dostaneme kvadratickú nerovnicu .-2a.(\vec u.\vec v)+a^2(\vec v.\vec v)>0")
Ľavá strana nerovnice predstavuje kvadratický trojčlen v premennej, ktorý nemá reálne korene (pre ľubovoľnú hodnotu je trojčlen > 0).
Jej diskriminant musí byť záporný, teda platí
![\small D= [−2(\vec u.\vec v)]^2−4∥\vec u∥^2∥\vec v∥|^2 < 0](https://lms.umb.sk/filter/tex/pix.php/2df16d51d590decd6d05662110ad61f0.png "\small D= [−2(\vec u.\vec v)]^2−4∥\vec u∥^2∥\vec v∥|^2 < 0")
Odtiaľ už ľahko dostaneme![\small [−2(\vec u.\vec v)]^2 < 4∥\vec u∥^2∥\vec v∥^2](https://lms.umb.sk/filter/tex/pix.php/ddf37051646187b1744f2d7ed772a9c0.png "\small [−2(\vec u.\vec v)]^2 < 4∥\vec u∥^2∥\vec v∥^2") a po odmocnení
a po odmocnení | < ∥\vec u∥.∥\vec v∥") .
.
- Dôkaz pre lineárne závislé vektory prenechávame čitateľovi. Zrejme bude platiť rovnosť strán.
Tvrdenia.
Nech je reálny vektorový priestor so skalárnym súčinom.
Nech
je reálny vektorový priestor so skalárnym súčinom.
- Trojuholníková nerovnosť.
: ∥\vec u+\vec v∥ \leq ∥\vec u∥∥\vec v∥") ,
,
pričom rovnosť nastane práve vtedy, keď vektory sú lineárne závislé (tj. jeden z nich je násobkom toho druhého). - Pytagorova veta.
: ∥\vec u+\vec v∥^2 = ∥\vec u∥^2+∥\vec v∥^2") .
. - Kosínusová veta.
Pre ľubovoľné dva vektory,
ktorých uhol je platí
 .
.
Dôkazy.
- Na úrovni VŠ použite Cauchy-Schwarzovu nerovnosť. Podrobné dôkazy nájdete v
"Sbírce řešených úloh Katedřy didaktiky fyziky Matematicko-fyzikální fakulty UK Praha". Tu.
Vezmite normu (druhú mocninu normy) na ľavej strane nerovnosti a prepíšte ju podľa definície pomocou skalárneho súčinu. Výraz zjednodušte vďaka linearite a symetrii skalárneho súčinu.Napr. pre trojuholníkovú nerovnosť upravte na:+∥\vec v∥^2") .
.
Ďalej aplikujte nerovnosť , následne použite Cauchy-Schwarzovú nerovnosť a nakoniec odmocnite.
, následne použite Cauchy-Schwarzovú nerovnosť a nakoniec odmocnite.
- Na úrovni SŠ použite Cauchy-Schwarzovu nerovnosť ale pre prípad vektorového priestoru so štandardnou ortonormálnou
bázou
,\vec e_2=(0,1,0),\vec e_3=(0,0,1) \right\rangle") . Pre vektory
. Pre vektory , \vec v=(v_1,v_2v_3) \in V(\mathbb R)") je skalárny súčin definovaný ako
je skalárny súčin definovaný ako
=u_1v_1+u_2v_2+u_3v_3") .
.
Cvičenie.
- Skalárny súčin je definovaný na takto:
 = 3x_1 y_1+2x_2 y_2+x_3 y_3") .
.
pre. Určte číslo  tak,
aby vektory
tak,
aby vektory ![\small \vec x = [a-1, 3, a+1], \vec y = [-4, -a, 3a]](https://lms.umb.sk/filter/tex/pix.php/d4c804218705193a674a8132248db45f.png "\small \vec x = [a-1, 3, a+1], \vec y = [-4, -a, 3a]") boli na seba kolmé v zmysle definície kolmosti vektorov. Aký reálny uhol zvierajú tieto vektory v euklidovskom 3-rozmernom priestore? (Ukážte, že táto operácia spĺňa podmienky skalárneho súčinu).
boli na seba kolmé v zmysle definície kolmosti vektorov. Aký reálny uhol zvierajú tieto vektory v euklidovskom 3-rozmernom priestore? (Ukážte, že táto operácia spĺňa podmienky skalárneho súčinu). - Body
![\small A[-3,2],B[2,4]](https://lms.umb.sk/filter/tex/pix.php/6c440150c22d1ac8d7c3e62d5d7e5753.png "\small A[-3,2],B[2,4]") sú susedné vrcholy štvorca. Pomocou skalárneho súčinu určte súradnice jeho zvyšných vrcholov.
sú susedné vrcholy štvorca. Pomocou skalárneho súčinu určte súradnice jeho zvyšných vrcholov.
Riešenie.
- Pomocou bilineárnych foriem ukážte, že operácia spĺňa podmienky skalárneho súčinu (použitie bilineárnych foriem na zdôvodnenie tvrdenia nájdete Tu).
Ak vektory
![\small \vec x = [a-1, 3, a+1], \pmb y = [-4, -a, 3a]](https://lms.umb.sk/filter/tex/pix.php/1f6b5b1db4da415fedcb494d8f4746ae.png "\small \vec x = [a-1, 3, a+1], \pmb y = [-4, -a, 3a]") majú byť na seba kolmé, tak ich skalárny súčin sa musí rovnať nule. Po dosadení dostaneme
majú byť na seba kolmé, tak ich skalárny súčin sa musí rovnať nule. Po dosadení dostaneme
=3x_1y_1+2x_2y_2+x_3y_3=3(a-1)(-4)+2⋅3(-a)+(a+1)3a=3a^2-15a+12.")
Riešením kvadratickej rovnice sú čísla . Pozrite si grafické riešenie
Tu.
. Pozrite si grafické riešenie
Tu. -
Pre skalárny súčin platí
,\vec{v} \right) =0⇒\vec{v}=(2,-5),||\vec{v}||-1") .
.
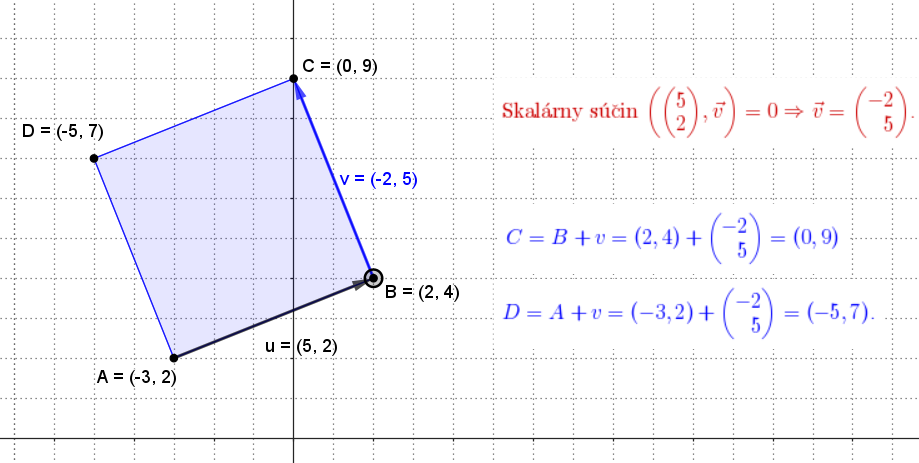
Definícia - ortogonálne vektory.
Nech je reálny vektorový priestor so skalárnym súčinom. Vektory ") nazývame navzájom ortogonálne resp. ortonormálne, ak
nazývame navzájom ortogonálne resp. ortonormálne, ak =0") pre
pre  resp. ak naviac platí
resp. ak naviac platí  .
.
Nech
je reálny vektorový priestor so skalárnym súčinom. Vektory nazývame navzájom ortogonálne resp. ortonormálne, ak pre resp. ak naviac platí .
\)
Schmidt ortogonalizačný proces
Nech je - rozmerný vektorový priestor so skalárnym súčinom ") a nech je daná množina
a nech je daná množina  lineárne nezávislých vektorov tohto konečno rozmerného priestoru, kde
lineárne nezávislých vektorov tohto konečno rozmerného priestoru, kde  .
.
je - rozmerný vektorový priestor so skalárnym súčinom a nech je daná množina lineárne nezávislých vektorov tohto konečno rozmerného priestoru, kde .
Definícia.
Schmidtov ortogonalizačný proces je proces, ktorým z množiny lineárne nezávislých vektorov vytvárame ortonormálnu bázu - rozmerného
vektorového priestoru .
Schmidtov ortogonalizačný proces je proces, ktorým z množiny
lineárne nezávislých vektorov vytvárame ortonormálnu bázu - rozmerného
vektorového priestoru .
Poznámka.
Ortonormálna báza sa vyznačuje vlastnosťou, že jej vektory majú normovanú jednotkovú dĺžku a všetky sú navzájom kolmé (ortogonálne).
Existenciu takejto ortonormálnej bázy zabezpečuje Veta - Schmidtov ortogonalizačný proces.
Ortonormálna báza sa vyznačuje vlastnosťou, že jej vektory majú normovanú jednotkovú dĺžku a všetky sú navzájom kolmé (ortogonálne).
Existenciu takejto ortonormálnej bázy zabezpečuje Veta - Schmidtov ortogonalizačný proces.
Celý proces vytvárania ortonormálnej bázy možno popísať algoritmicky/rekurentne takto:
- V prvom kroku Schmidtovho ortogonalizačného procesu sa za základ stanoví prvý vektor z danej množiny vektorov . Podľa tohto vektora sa odvíja orientácia
zvyšných.
- Ďalším
 -tym krokom je samotná ortogonalizácia -teho vektora. Nasledujúci -ty vektor určíme ako lineárnu
kombináciu -teho vektora z danej množiny vektorov a už
-tym krokom je samotná ortogonalizácia -teho vektora. Nasledujúci -ty vektor určíme ako lineárnu
kombináciu -teho vektora z danej množiny vektorov a už ") vytvorených vektorov.
vytvorených vektorov. - Nakoniec prevedieme normalizáciu vektorov. Pre zjednodušenie výpočtov sa vektory normalizujú až na koniec procesu.
Veta (Schmidtov ortogonalizačný proces).
Nech") je vektorový priestor so skalárnym súčinom
je vektorový priestor so skalárnym súčinom
") a nech
a nech  sú lineárne nezávislé vektory. Potom existujú
ortonormálne vektory
sú lineárne nezávislé vektory. Potom existujú
ortonormálne vektory  , pre ktoré platí
, pre ktoré platí
![\small [{\vec {e_1}, \vec {e_2}, \cdot \cdot \cdot, \vec {e_i}}] = [{\vec {u_1}, \vec {u_2}, \cdot \cdot \cdot, \vec {u_i}}], ∀i ∈ {1, 2, . . . , k}](https://lms.umb.sk/filter/tex/pix.php/8fbd3eb17b0ef0d79258fbf25837985e.png "\small [{\vec {e_1}, \vec {e_2}, \cdot \cdot \cdot, \vec {e_i}}] = [{\vec {u_1}, \vec {u_2}, \cdot \cdot \cdot, \vec {u_i}}], ∀i ∈ {1, 2, . . . , k}")
Nech
je vektorový priestor so skalárnym súčinom
a nech sú lineárne nezávislé vektory. Potom existujú
ortonormálne vektory , pre ktoré platí
Dôkaz.
A. Proces ortogonalizácie.
A. Proces ortogonalizácie.
- Najprv určíme prvý vektor, pričom položíme
 .
. - Druhý vektor určíme ako lineárnu kombináciu
 , pričom podľa predpokladu platí
, pričom podľa predpokladu platí =0") .
Po skalárnom vynásobení
rovnice vektorom
.
Po skalárnom vynásobení
rovnice vektorom  dostaneme riešenie
dostaneme riešenie
 }{(\vec e_1,\vec e_1)}") .
.
Po dosadení dostaneme riešenie
 }{(\vec e_1,\vec e_1)}\small \vec e_1") .
. - Pre tretí vektor bude lineárna kombinácia v tvare
 , pričom platí
, pričom platí =0;(\vec e_2,\vec e_3)=0") .
Po skalárnom vynásobení rovnice postupne vektormi
.
Po skalárnom vynásobení rovnice postupne vektormi  dostaneme riešenie
dostaneme riešenie
 }{(\vec e_1,\vec e_1)}") ;
;  }{(\vec e_2,\vec e_2)}") .
. - Pomocou matematickej indukcie dokážeme, že pre ďalšie vektory platia vzťahy
 }{(\vec e_1,\vec ;e_1)}} \small \vec e_1-\large\frac{(\vec e_2,\vec u_k) }{(\vec e_2,\vec e_2)} \small \vec e_2-···-\large\frac{(\vec e_{k-1},\vec u_k) }{(\vec e_{k-1},\vec e_{k-1})} \small \vec e_{k-1}") .
. - Teraz stačí len "znormovať" tieto vektory.
Dostaneme jednotkové vektory

Cvičenie.
- Vo vektorovom priestore usporiadaných trojíc reálnych čísel sú dané vektory
,\vec u_2=(0,1,2),\vec u_3=(1,1,0)") . Vykonajte Schmidtov ortogonalizačný proces.
. Vykonajte Schmidtov ortogonalizačný proces. - Určte aspoň jednu ortonormálnu bázu vektorového podpriestoru
") , ktorý je určený (smerom-rovinou)
, ktorý je určený (smerom-rovinou)  .
.
Riešenie.
- Zvoľme prvý vektor ortogonálnej bázy
") (zrejme nie je jednotkový, jeho normalizáciu urobíme v závere riešenia). Druhý
vektor
(zrejme nie je jednotkový, jeho normalizáciu urobíme v závere riešenia). Druhý
vektor  určíme zo vzťahu
určíme zo vzťahu
(k)") ,
,
kde") . Rovnicu (k) skalárne vynásobíme vektorom
. Rovnicu (k) skalárne vynásobíme vektorom ") . Podľa predpokladu v Schmidtovom ortogonalizačnom procese musia
byť vektory
. Podľa predpokladu v Schmidtovom ortogonalizačnom procese musia
byť vektory  na seba kolmé, teda musí pre ich skalárny súčin platiť rovnosť
na seba kolmé, teda musí pre ich skalárny súčin platiť rovnosť ,\vec b_2)=0") . Zároveň platí
. Zároveň platí
,(1,1,0))=2") . Po dosadení do (k) môžeme určiť/vypočítať koeficient
. Po dosadení do (k) môžeme určiť/vypočítať koeficient
 , odkiaľ dostaneme pre vektor
, odkiaľ dostaneme pre vektor
") .
.
Tretí vektor určíme zo vzťahu
 + r(1,1,0)+s(-1,1,4)")
(zobrali sme 2-násobok druhého vektora ). Ľahko nahliadneme, že
). Ľahko nahliadneme, že  , odkiaľ
, odkiaľ ") . Zrejme
vektory
. Zrejme
vektory  sú na seba kolmé a stačí ich znormovať.
sú na seba kolmé a stačí ich znormovať.
V prípade, že by sme zvolili") dostali by sme bázu
dostali by sme bázu ,(-1,4,5), (3,2,-1)") , ktorá je tiež ortogonálna.
Teda výsledná báza závisí od voľby poradia vektorov .
, ktorá je tiež ortogonálna.
Teda výsledná báza závisí od voľby poradia vektorov .
- Stačí určiť smerové vektory danej roviny, ktoré patria do vektorového priestoru určeného danou rovinou (do jej zamerania). Sú to napríklad vektory
,\vec v=(1,2,1)") .
Potom realizujte Schmidtov ortogonalizačný proces a utvorte ortogonálnu bázu skúmaného vektorového podpriestoru.
.
Potom realizujte Schmidtov ortogonalizačný proces a utvorte ortogonálnu bázu skúmaného vektorového podpriestoru.
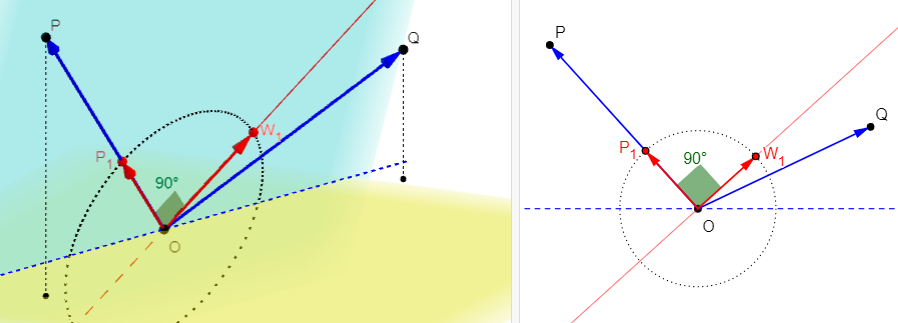
Preštudujte si študijný text o kolmých vektorových podpriestoroch v práci:
[MONc], časť Totalne kolmé vektorové priestory, Kolmé vektorové priestory.
\)
Afinný n-rozmerný priestor
Pri syntetickom prístupe v geometrii sme vychádzame z euklidovského priestoru podľa Euklidových Základov, v ktorom sa základné geometrické útvary (bod, priamka) nedefinovali.
Vedeli sme jednoznačne rozhodnúť o pravdivosti výrokov typu: Bod patrí alebo nepatrí danému útvaru.
Tento prístup z matematického hľadiska predstavuje zásadný problém: Nevieme jasne zadefinovať, čo je to (bodová) množina.
V predchádzajúcich kapitolách (podobne tomu bolo aj historicky vo vývoji geometrie) boli zavedené základné pojmy:}") , ktorej vektory sú navzájom kolmé a majú
jednotkovú dĺžku. Takejto báze tiež hovoríme ortonormálová báza.
, ktorej vektory sú navzájom kolmé a majú
jednotkovú dĺžku. Takejto báze tiež hovoríme ortonormálová báza.
Súradnice pevne zvoleného vektora  v danej
báze
v danej
báze  zapisujeme pomocou
dolného indexu
zapisujeme pomocou
dolného indexu
}_{\mathcal{B}}=w_1 \cdot \vec {b_1} \oplus w_2 \cdot \vec {b_2} \oplus ...\oplus w_n \cdot \vec {b_n}") .
.
V predchádzajúcich kapitolách (podobne tomu bolo aj historicky vo vývoji geometrie) boli zavedené základné pojmy:
- vektor ako prvok vektorového priestoru (štruktúry s predpísanými binárnymi operáciami)
- štandardná báza vektorového priestoru

- súradnice vektora
") v štandardnej báze, pričom zrejme platí
,
v štandardnej báze, pričom zrejme platí
,
, ktorej vektory sú navzájom kolmé a majú
jednotkovú dĺžku. Takejto báze tiež hovoríme ortonormálová báza.
Súradnice
pevne zvoleného vektora v danej
báze zapisujeme pomocou
dolného indexu
.
Tieto pojmy nám umožňujú zaviesť afinný priestor axiomaticky pomocou vektorového priestoru.
Definícia (Afinný priestor).
Afinný priestor nad poľom je trojica
nad poľom je trojica ") , kde
, kde
Afinný priestor
nad poľom je trojica , kde
 je množina bodov.
je množina bodov. je vektorový priestor nad poľom .
je vektorový priestor nad poľom . je zobrazenie s vlastnosťami:
je zobrazenie s vlastnosťami:
(AP1)+f(Y,Z)=f(X,Z)")
(AP2)")
je bijektívne zobrazenie. Pozrite si GeoGebra applet: Príklady afinného priestoru – https://www.geogebra.org/m/wb2cjewy“.
V definícii afinného priestoru sme použili označenie ") , ktoré sa najčastejšie vyskytuje odbornej literatúre. Toto označenie často nahradíme,
ktoré sme používali v teórii vektorových priestorov, symbolom
, ktoré sa najčastejšie vyskytuje odbornej literatúre. Toto označenie často nahradíme,
ktoré sme používali v teórii vektorových priestorov, symbolom  . Teda
. Teda  := \small \overrightarrow{XY}") .
.
, ktoré sa najčastejšie vyskytuje odbornej literatúre. Toto označenie často nahradíme,
ktoré sme používali v teórii vektorových priestorov, symbolom . Teda .
Pripomeňme, že vo vektorovom priestore sme tiež používali termín "bod" v súvislosti s viazaným vektorom  , teda len v súvislosti s vektorovým priestorom
. V tomto vektorovom priestore voľný vektor
, teda len v súvislosti s vektorovým priestorom
. V tomto vektorovom priestore voľný vektor  predstavoval usporiadanú -ticu reálnych čísel. Začiatok voľného vektora ("bod")
mal súradnice (0,0, ..., 0) a koncový "bod" voľného vektora mal súradnice zhodné so súradnicami daného vektora v štandardnej báze. Vektor sme interpretovali ako posunutie,
pohyb. Intuitívne sme používali aj súčet
predstavoval usporiadanú -ticu reálnych čísel. Začiatok voľného vektora ("bod")
mal súradnice (0,0, ..., 0) a koncový "bod" voľného vektora mal súradnice zhodné so súradnicami daného vektora v štandardnej báze. Vektor sme interpretovali ako posunutie,
pohyb. Intuitívne sme používali aj súčet
 ,
,
ktorý vo vektorovom priestore nevieme určiť (nie je definovaný). Avšak v afinnom priestore to už budeme vedieť definovať, bude predstavovať posunutý bod o vektor .
o vektor .
, teda len v súvislosti s vektorovým priestorom
. V tomto vektorovom priestore voľný vektor predstavoval usporiadanú -ticu reálnych čísel. Začiatok voľného vektora ("bod")
mal súradnice (0,0, ..., 0) a koncový "bod" voľného vektora mal súradnice zhodné so súradnicami daného vektora v štandardnej báze. Vektor sme interpretovali ako posunutie,
pohyb. Intuitívne sme používali aj súčet
,
ktorý vo vektorovom priestore nevieme určiť (nie je definovaný). Avšak v afinnom priestore to už budeme vedieť definovať, bude predstavovať posunutý bod
o vektor .
Poznámky.
Dimenzia (alebo rozmer) afinného priestoru je číslo, ktoré je dimenziou jeho zamerania (dimenziou vektorového priestoru). Afinný priestor dimenzie 0, 1, 2
budeme v poradí nazývať bod, priamka, rovina.
Dimenzia (alebo rozmer) afinného priestoru je číslo, ktoré je dimenziou jeho zamerania (dimenziou vektorového priestoru
). Afinný priestor dimenzie 0, 1, 2
budeme v poradí nazývať bod, priamka, rovina.
Definícia.
(n-1)-rozmerný podpriestor n-rozmerného afinného priestoru nazývame nadrovina priestoru .
(n-1)-rozmerný podpriestor n-rozmerného afinného priestoru
nazývame nadrovina priestoru .
Poznámky.
Ak sú body afinného priestoru , tak ľahko nahliadneme platnosť nasledujúcich tvrdení
sú body afinného priestoru , tak ľahko nahliadneme platnosť nasledujúcich tvrdení
Dôkazy (predchádzajúce tvrdenia).
Ak
sú body afinného priestoru , tak ľahko nahliadneme platnosť nasledujúcich tvrdení-

-

-

-

-
 .
.
Dôkazy (predchádzajúce tvrdenia).
- Podľa (A1) platí
 , odkiaľ
, odkiaľ  .
. -
 , čiže
, čiže  .
. - Vyplýva priamo z (A2) - bijekcia.
- Ak
 , potom
, potom  , teda
, teda  a
vzhľadom na (3)
a
vzhľadom na (3)  .
. - Nech
 . Pretože aj , tak
. Pretože aj , tak  , odkiaľ
podľa (3)
, odkiaľ
podľa (3)  .
.
Tvrdenie (Rozdiel bodov).
Každými dvomi bodmi afinného priestoru je určený vektor, ktorý je daný ich rozdielom.
Každými dvomi bodmi afinného priestoru je určený vektor, ktorý je daný ich rozdielom.
Dôkaz (bez súradnicového systému).
Nech je afinný priestor nad poľom . V afinnom priestore je zavedená operácia  , ktorá každým dvomi
bodmi
, ktorá každým dvomi
bodmi  priraďuje vektor
priraďuje vektor  . Táto operácia má nasledujúce vlastnosti:
. Táto operácia má nasledujúce vlastnosti:
Ukázali sme, že operácia priradenia vektora dvom bodom je jednoznačne daná ich „rozdielom“, ktorý je chápaný v zmysle vektorového priestoru. Definitoricky môžeme
písať 
Nech
je afinný priestor nad poľom . V afinnom priestore je zavedená operácia , ktorá každým dvomi
bodmi priraďuje vektor . Táto operácia má nasledujúce vlastnosti:
- Vektor medzi dvoma bodmi je dobre definovaný, teda existuje zobrazenie
 \mapsto \overrightarrow{AB} \in V") ,
,
ktoré je také, že pre každý pevný bod je zobrazenie  bijektívne zobrazenie z množiny bodov
do vektorového priestoru .
bijektívne zobrazenie z množiny bodov
do vektorového priestoru . - Afinná kombinatorika bodov. Pre každé tri body
 platí:
platí:

Toto znamená, že vektor jednoznačne popisuje prechod z bodu do bodu .
jednoznačne popisuje prechod z bodu do bodu . - Existencia afinného bodu ako referencie.
Nech je ľubovoľný pevný bod v  (nepotrebujeme ho interpretovať ako začiatok súradnicového systému, stačí, že existuje). Potom pre každý
bod
(nepotrebujeme ho interpretovať ako začiatok súradnicového systému, stačí, že existuje). Potom pre každý
bod  existuje jednoznačný vektor
existuje jednoznačný vektor  , ktorý reprezentuje jeho afinnú polohu voči .
, ktorý reprezentuje jeho afinnú polohu voči .
- Vyjadrenie vektora medzi bodmi pomocou rozdielu.
Pre ľubovoľné body platí:
platí:

Stačí si uvedomiť, že sú vektory, pre ktoré platia grupové operácie sčítania, inverzného (tj. opačného) prvku, ... Preto uvedený rozdiel vektorov
sú vektory, pre ktoré platia grupové operácie sčítania, inverzného (tj. opačného) prvku, ... Preto uvedený rozdiel vektorov  je dobre definovaný vo . Keďže výber bodu je ľubovoľný, vidíme, že závisí iba
od bodov a , nie od voľby referenčného bodu.
je dobre definovaný vo . Keďže výber bodu je ľubovoľný, vidíme, že závisí iba
od bodov a , nie od voľby referenčného bodu.
Ukázali sme, že operácia priradenia vektora dvom bodom je jednoznačne daná ich „rozdielom“, ktorý je chápaný v zmysle vektorového priestoru
. Definitoricky môžeme
písať
Poznámky.
Ak usporiadaná dvojica bodov") predstavuje umiestnenie vektora , tak vektor môžeme vyjadriť
ako
predstavuje umiestnenie vektora , tak vektor môžeme vyjadriť
ako  , čo predstavuje zobrazenie
, čo predstavuje zobrazenie
") .
.
Ak usporiadaná dvojica bodov
predstavuje umiestnenie vektora , tak vektor môžeme vyjadriť
ako , čo predstavuje zobrazenie
.
Podmienka (AP2) sa niekedy uvádza takto:
(AP2') existuje práve jeden
bod
existuje práve jeden
bod  taký, že
taký, že X,P) =\vec u") .
.
(AP2'') taký, že
taký, že  .
.
V tejto kapitole budeme pracovať len s reálnym afinným priestorom nad telesom (poľom) reálnych čísel. Fundamentálnou vlastnosťou
afinného bodového priestoru je axiomatické tvrdenie:
(AP2')
existuje práve jeden
bod taký, že .
(AP2'')
taký, že .
V tejto kapitole budeme pracovať len s reálnym afinným priestorom nad telesom (poľom) reálnych čísel
. Fundamentálnou vlastnosťou
afinného bodového priestoru je axiomatické tvrdenie:
Tvrdenie (Existencia referenčného afinného bodu).
V afinnom priestore platí vlastnost’ (AP2) pre ľubovoľný pevne zvolený bod  ,
t.j.
,
t.j. ") je bijektívne zobrazenie. Stačí si uvedomiť, že
je bijektívne zobrazenie. Stačí si uvedomiť, že  = f(P′, P) + f(P, X))") .
.
V afinnom priestore
platí vlastnost’ (AP2) pre ľubovoľný pevne zvolený bod ,
t.j.
je bijektívne zobrazenie. Stačí si uvedomiť, že .
Cvičenie.
Zistite, či usporiadané trojice sú afinným priestorom.
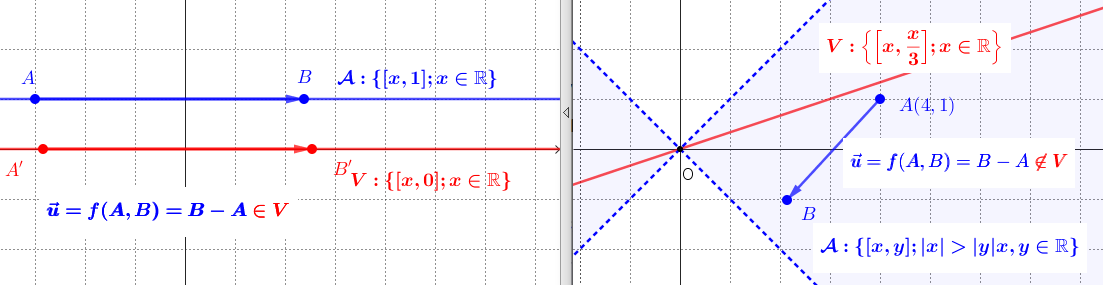
Otvorte si dynamické obrázky: ľavý Tu - príklad afinného priestoru; pravý Tu - nie je afinným priestorom.
Zistite, či usporiadané trojice
sú afinným priestorom.
Otvorte si dynamické obrázky: ľavý Tu - príklad afinného priestoru; pravý Tu - nie je afinným priestorom.
Poznámky.
- Afinný priestor budeme tiež jednoducho označovať
 alebo ako
alebo ako  .
Vektorový priestor prislúchajúci afinnému priestoru
.
Vektorový priestor prislúchajúci afinnému priestoru ") budeme označovať ako
budeme označovať ako ") alebo len .
alebo len . - Vektorovému priestoru hovoríme tiež zameranie afinného priestoru. Afinný priestor, ktorého zameraním je vektorový priestor nad poľom reálnych čísel nazývame reálny afinný priestor alebo aj aritmetický afinný priestor.
- Affinis znamená latinsky príbuzný. Prvý krát tento pojem použil Leonhard Euler (1707-1783) pre označenie vzťahu vzoru a obrazu v zobrazení, ktoré zachováva deliaci pomer. Afinná geometria je geometria bez vzdialenosti/miery.
Príklad.
Dané sú množiny (červená)
 \in \mathbb R^3 ; x_1 + x_2 -2x_3 = -5}\rbrace") ,
,
množina (modrá)
 \in {\small\mathbb R^3} ; x_1 + x_2 -2x_3 = 0}\rbrace")
a zobrazenie}") je odčitovanie trojíc reálnych čísel po zložkách.
je odčitovanie trojíc reálnych čísel po zložkách.
Dokážte, že") je afinný priestor nad poľom .
Dynamický obrázok si otvoríte Tu.
je afinný priestor nad poľom .
Dynamický obrázok si otvoríte Tu.
Dané sú množiny (červená)
,
množina (modrá)
a zobrazenie
je odčitovanie trojíc reálnych čísel po zložkách.
Dokážte, že
je afinný priestor nad poľom .
Dynamický obrázok si otvoríte Tu.
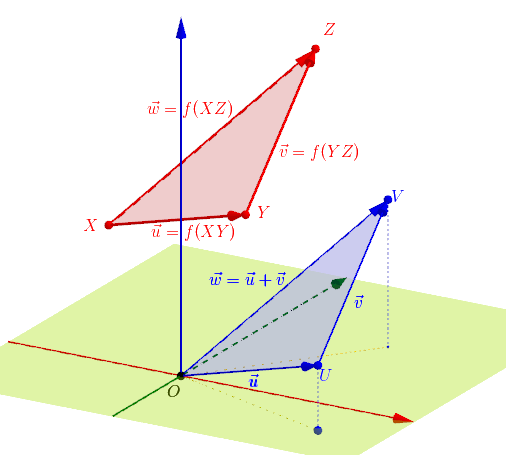
Riešenie.
Pre ľubovoľný bod![\small X[x_1,x_2,x_3] \in \mathcal{A}](https://lms.umb.sk/filter/tex/pix.php/1e32b09cf88a45e990cb4c781e1264a3.png "\small X[x_1,x_2,x_3] \in \mathcal{A}") platí, že
platí, že ") .
.
Pre ľubovoľný bod
platí, že .
- Podmienka (AP1): zo vzťahov
![\small f(X,Y)=\left [x_1-y_1,x_2-y_2,x_3-y_3 \right ] =\left [ x_1-y_1,x_2-y_2, \frac{1}{2} \left\{(x_1-y_1 )+(x_2-y_2 ) \right\} \right ]](https://lms.umb.sk/filter/tex/pix.php/212ddeb0870fc8fd963a34c97efd0b5e.png "\small f(X,Y)=\left [x_1-y_1,x_2-y_2,x_3-y_3 \right ] =\left [ x_1-y_1,x_2-y_2, \frac{1}{2} \left\{(x_1-y_1 )+(x_2-y_2 ) \right\} \right ]")
![\small f(Y,Z)=\left [y_1-z_1,\;y_2-z_2,y_3-z_3 \right ]=\left [y_1-z_1,\;y_2-z_2, \frac{1}{2} \left\{(y_1-z_1 )+(y_2-z_2 )\right\} \right ]](https://lms.umb.sk/filter/tex/pix.php/b8e2befaa385d58e1495d0dda24dd2d8.png "\small f(Y,Z)=\left [y_1-z_1,\;y_2-z_2,y_3-z_3 \right ]=\left [y_1-z_1,\;y_2-z_2, \frac{1}{2} \left\{(y_1-z_1 )+(y_2-z_2 )\right\} \right ]")
dostávame![\small f(X,Z)=\left [ x_1-z_1,x_2-z_2, \frac{1}{2} ((x_1-z_1 )+(x_2-z_2 )) \right ]](https://lms.umb.sk/filter/tex/pix.php/1b18ee33757839b8a6461582719e1a95.png "\small f(X,Z)=\left [ x_1-z_1,x_2-z_2, \frac{1}{2} ((x_1-z_1 )+(x_2-z_2 )) \right ]") ,
,
čo bolo treba ukázať. - Podmienka (AP2): Nech
![\small P=[p_1,p_2, \frac{1}{2} (p_1+p_2+5)]](https://lms.umb.sk/filter/tex/pix.php/09702c0c73bf5072e288f185b849edb3.png "\small P=[p_1,p_2, \frac{1}{2} (p_1+p_2+5)]") je pevne zvolený bod
a
je pevne zvolený bod
a ![\small X=[x_1,x_2, \frac{1}{2} (x_1+x_2+5)], Y=[y_1,y_2, \frac{1}{2} (x_1+x_2+5)]](https://lms.umb.sk/filter/tex/pix.php/b45741f780d3658c11d776d825c1471b.png "\small X=[x_1,x_2, \frac{1}{2} (x_1+x_2+5)], Y=[y_1,y_2, \frac{1}{2} (x_1+x_2+5)]") sú ľubovoľné dva rôzne body.
sú ľubovoľné dva rôzne body.
Potom je∨(x_2 \neq y_2 )") a zrejme aj pre obrazy
a zrejme aj pre obrazy
![\small f(P,X)=\left [p_1-x_1,p_2-x_2,\frac{1}{2} ((p_1-x_1 )+(p_2-x_2 )) \right ]](https://lms.umb.sk/filter/tex/pix.php/63009f454440a8eae526eb94e04d07d7.png "\small f(P,X)=\left [p_1-x_1,p_2-x_2,\frac{1}{2} ((p_1-x_1 )+(p_2-x_2 )) \right ]")
![\small f(P,Y)=\left [ p_1-y_1,p_2-y_2,\frac{1}{2} ((p_1-y_1 )+(p_2-y_2 )) \right ]](https://lms.umb.sk/filter/tex/pix.php/596431e055367812dc5b1a41713657dd.png "\small f(P,Y)=\left [ p_1-y_1,p_2-y_2,\frac{1}{2} ((p_1-y_1 )+(p_2-y_2 )) \right ]")
platí, že sú rôzne. Teda zobrazenie je bijektívne.
Dôkaz, pre podmienku (AP2) prenechávame čitateľovi.
\)
Lineárna súradnicová sústava
V predchádzajúcej kapitole sme uviedli, že dimenzia (rozmer) afinného priestoru sa definuje ako dimenzia jeho vektorového zamerania. Teda definitoricky
dim dim
dim ") .
.
dim
dim .
Poznámky (Pripomenutie pojmov).
- Dimenziu afinného priestoru označujeme indexom vpravo hore, napríklad -rozmerný afinný priestor ako
 .
. - Afinný priestor dimenzie 1 nazývame afinná priamka, označujeme ho
 ale aj ako obvykle
ale aj ako obvykle 
- Afinný priestor dimenzie 2 nazývame afinná rovina, označujeme ho
 ale aj ako obvykle
ale aj ako obvykle 
- Afinný priestor dimenzie
 nazývame afinná nadrovina.
nazývame afinná nadrovina.
Uvedieme základné definície z práce [MONa], v ktorých sa pomocou bázy vektorového priestoru zavádza repér afinného priestoru a (lineárna) afinná súradnicová sústava.
Súhrnne sa pre tento systém používa označenie: afinný súradnicový systém.
Definície.
- Nech
") je afinný priestor a je ľubovoľný bod tohto priestoru. Ďalej nech
je afinný priestor a je ľubovoľný bod tohto priestoru. Ďalej nech  je báza (nie nutne ortonormálna) vektorového priestoru .
Potom
je báza (nie nutne ortonormálna) vektorového priestoru .
Potom ") -tica
-tica  sa nazýva repér afinného priestoru
sa nazýva repér afinného priestoru  .
.
- Nech je afinný priestor, nech
 je repér v .
Lineárna súradnicová sústava (stručne LSS) je bijektívne zobrazenie
je repér v .
Lineárna súradnicová sústava (stručne LSS) je bijektívne zobrazenie
![\small \mathcal {L: A \rightarrow \mathbb R^n}; \; P \rightarrow [p_1,p_2, . . . , p_n],](https://lms.umb.sk/filter/tex/pix.php/f2225c4e51903ae901413c224fbda4ef.png "\small \mathcal {L: A \rightarrow \mathbb R^n}; \; P \rightarrow [p_1,p_2, . . . , p_n],")
pričom . Pozrite si prácu
Tu (str. 8-11).
. Pozrite si prácu
Tu (str. 8-11).
Dôkaz korektnosti definície.
Ľubovoľný vektor (teda aj polohový) vektorového priestoru sa dá jednoznačne vyjadriť ako lineárna kombinácia vektorov bázy tohto vektorového priestoru
 .
.
Z vlastnosti (AP2) vyplýva, že pre bod a vektor  existuje práve
jeden bod
existuje práve
jeden bod  . Preto aj bod
. Preto aj bod  vzhľadom na danú afinnú sústavu súradníc sa dá jednoznačne vyjadriť ako kombinácia
vzhľadom na danú afinnú sústavu súradníc sa dá jednoznačne vyjadriť ako kombinácia
 .
.
Rovnosť skrátene zapisujeme ako
skrátene zapisujeme ako ![\small P = [p_1,p_2, . . . , p_n]](https://lms.umb.sk/filter/tex/pix.php/cd3bff3cdd6edb7bc37b5e2308304fc3.png "\small P = [p_1,p_2, . . . , p_n]") a
a  -ticu
-ticu
![[\small p_1,p_2, . . . , p_n]](https://lms.umb.sk/filter/tex/pix.php/fc0298f4a320aad14ca87bd805d6a0ec.png "[\small p_1,p_2, . . . , p_n]")
nazývame súradnicami bodu . Súradnice bodu budeme zapisovať v hranatých zátvorkách
. Súradnice bodu budeme zapisovať v hranatých zátvorkách ![\pmb{ [\small x_1,x_2, . . . , x_n] }](https://lms.umb.sk/filter/tex/pix.php/8be3a9e49438bc054ad1d97cb87bcdc4.png "\pmb{ [\small x_1,x_2, . . . , x_n] }") .
Vektor, ktorý určuje lineárna kombinácia
.
Vektor, ktorý určuje lineárna kombinácia  sa nazýva polohový
vektor
sa nazýva polohový
vektor  .
.
Ľubovoľný vektor (teda aj polohový) vektorového priestoru sa dá jednoznačne vyjadriť ako lineárna kombinácia vektorov bázy tohto vektorového priestoru
.
Z vlastnosti (AP2) vyplýva, že pre bod
a vektor existuje práve
jeden bod . Preto aj bod vzhľadom na danú afinnú sústavu súradníc sa dá jednoznačne vyjadriť ako kombinácia
.
Rovnosť
skrátene zapisujeme ako a -ticu
nazývame súradnicami bodu
. Súradnice bodu budeme zapisovať v hranatých zátvorkách .
Vektor, ktorý určuje lineárna kombinácia sa nazýva polohový
vektor .
Existencia a jednoznačnosť súradníc bodu vyplýva tiež z jednoznačného riešenia rovnice,
 ,
,
keďže vektory tvoria bázu vektorového priestoru .
tvoria bázu vektorového priestoru .
vyplýva tiež z jednoznačného riešenia rovnice,
,keďže vektory
tvoria bázu vektorového priestoru .
Pomenovania.
 – začiatok súradnicovej sústavy
– začiatok súradnicovej sústavy – jednotkové body súradnicovej sústavy
– jednotkové body súradnicovej sústavy – súradnicové osi
– súradnicové osi
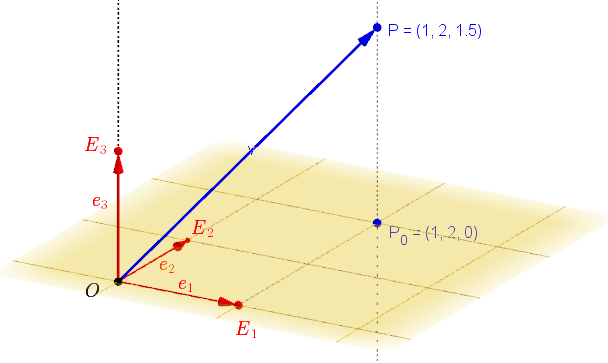
Cvičenie.
Ukážte, že usporiadaná trojica je afinný priestor, ak
![\small {\mathcal {A}} = \lbrace{ [x_1,x_2] \in R;x_2=x_1^2 }\rbrace , V=R, f( [x_1,x_2], [y_1,y_2])=x_1-y_1](https://lms.umb.sk/filter/tex/pix.php/9b51468f45ac88b2ac91fe89d74d4074.png "\small {\mathcal {A}} = \lbrace{ [x_1,x_2] \in R;x_2=x_1^2 }\rbrace , V=R, f( [x_1,x_2], [y_1,y_2])=x_1-y_1") .
Zistite. či zobrazenie
.
Zistite. či zobrazenie ![\small \mathcal {L: A \rightarrow \mathbb R^1}; \; \mathcal {L}( [x_1,x_2])=1+x_1](https://lms.umb.sk/filter/tex/pix.php/d08ad3901ed89daea6bc657e89a5dec3.png "\small \mathcal {L: A \rightarrow \mathbb R^1}; \; \mathcal {L}( [x_1,x_2])=1+x_1") je lineárna sústava súradníc.
je lineárna sústava súradníc.
Ukážte, že usporiadaná trojica
je afinný priestor, ak
.
je lineárna sústava súradníc.
Riešenie.
- Ľubovoľný bod
 afinného priestoru má súradnice
afinného priestoru má súradnice ![[x,x^2]](https://lms.umb.sk/filter/tex/pix.php/2a47aadc07cd7da43f678ac9b8e00ec6.png "[x,x^2]") . Množina všetkých bodov afinného priestoru
. Množina všetkých bodov afinného priestoru  je parabola (nakreslite graf v GeoGebre).
je parabola (nakreslite graf v GeoGebre). - Podmienka (AP1) pre body
![\small X[x,x^2],Y[y,y^2],Z[z,z^2]](https://lms.umb.sk/filter/tex/pix.php/a9da4bf39fa9cfcb66460afedc953ec4.png "\small X[x,x^2],Y[y,y^2],Z[z,z^2]") zrejme platí, lebo
zrejme platí, lebo
+f(Y,Z)=(x-y)+(y-z)=x-z=f(X,Z)") .
.
- Podmienka (AP2): Zvoľme si ľubovoľné reálne čísla
 a body
a body ![\small P[p,p^2],X[x,x^2]](https://lms.umb.sk/filter/tex/pix.php/ca8b4484aad29d6e0f414858bbb2a43d.png "\small P[p,p^2],X[x,x^2]") , potom zobrazenie
, potom zobrazenie =p-x") je bijekcia.
je bijekcia. - Zrejme aj zobrazenie
![\small \mathcal {L: A \rightarrow \mathbb R^1}; \; \mathcal {L}( [x,x^2])=1+x](https://lms.umb.sk/filter/tex/pix.php/0fc66a8834cd1025d9c5b8cd14f37a99.png "\small \mathcal {L: A \rightarrow \mathbb R^1}; \; \mathcal {L}( [x,x^2])=1+x") je bijektívne, preto je LSS.
je bijektívne, preto je LSS.
 \)
\)
Veta o súradniciach
V kapitole Lineárna súradnicová sústava sme uviedli:
Súradnice bodu afinného priestoru vzhľadom na danú afinnú sústavu súradníc sú súradnice jeho polohového
vektora
afinného priestoru vzhľadom na danú afinnú sústavu súradníc sú súradnice jeho polohového
vektora  vzhľadom na bázu súradnicových vektorov. Teda platí
vzhľadom na bázu súradnicových vektorov. Teda platí
 .
.
Súradnice bodu
afinného priestoru vzhľadom na danú afinnú sústavu súradníc sú súradnice jeho polohového
vektora vzhľadom na bázu súradnicových vektorov. Teda platí
.
Po zavedení súradnicovej sústavy môžeme nielen vektory ale aj body "sčitovať". Pravidlá, ktoré musíme pritom dodržiavať stanovuje tzv. základná
veta o súradniciach, ktorú poznáme z lineárnej algebry. Nech ") -tica
-tica  je repér afinného priestoru
je repér afinného priestoru  .
.
-tica je repér afinného priestoru .Základná veta o súradniciach.
Nech sú dané dva body a ich súradnice![\small A=[a_1,a_2, \cdot \cdot \cdot , a_n], B=[b_1,b_2, \cdot \cdot \cdot , b_n] \in \mathcal A](https://lms.umb.sk/filter/tex/pix.php/261b65e9911f1b06ec0962250640e3ce.png "\small A=[a_1,a_2, \cdot \cdot \cdot , a_n], B=[b_1,b_2, \cdot \cdot \cdot , b_n] \in \mathcal A") a
vektor
a
vektor  \in \mathrm V") , potom
, potom
Nech sú dané dva body a ich súradnice
a
vektor , potom
")
![\small A+\vec u=[a_1+u_1,a_2+u_2, \cdot \cdot \cdot , a_n+u_n]](https://lms.umb.sk/filter/tex/pix.php/d996c24c4f0167368e127f25e2dca5fa.png "\small A+\vec u=[a_1+u_1,a_2+u_2, \cdot \cdot \cdot , a_n+u_n]") sú body afinného priestoru
sú body afinného priestoru
.
Dôkaz.
- Zrejme z vlastnosti (AP1) afinného priestoru vyplýva, že
 a pre začiatok súradnej sústavy
a pre začiatok súradnej sústavy  bude platiť
bude platiť =f(A,O)+f(O,B)") tj.
tj.  odkiaľ s využitím Tvrdenia (Rozdiel bodov) dostaneme
odkiaľ s využitím Tvrdenia (Rozdiel bodov) dostaneme

Z bijektívnosti LSS a z vlastnosti vyplýva, že

 .
.
Z definície sčítania (rozdielu) vektorov v báze dostaneme
dostaneme
- Z vlastnosti (AP2') afinného priestoru vyplýva, že
 existuje práve jeden bod
existuje práve jeden bod
 taký, že
taký, že  . Keďže aj pre bod
. Keďže aj pre bod  platí, že existuje práve jeden
bod taký, že
platí, že existuje práve jeden
bod taký, že  je polohový vektor v danom repéri. Pre polohové vektory platí
je polohový vektor v danom repéri. Pre polohové vektory platí

ale . Po úprave dostaneme
. Po úprave dostaneme
+(P-O)=(a_1,a_2, \cdot \cdot \cdot , a_n)+(u_1,u_2,\cdot \cdot \cdot ,u_n)=(a_1+u_1, \cdot \cdot \cdot , a_n+u_n)") .
.
Záver .
.
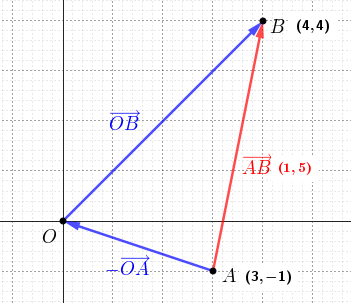
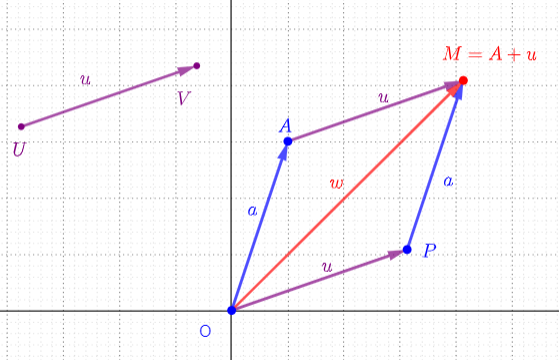
Zmena repéru
Pri závádzaní lineárnej súradnicovej sústavy sa v definícii nekládla požiadavka ortonormálnosti na repér afinného priestoru
afinného priestoru  . To znamená, že súradnice
nejakého bodu
. To znamená, že súradnice
nejakého bodu  môžeme vyjadriť aj vzhľadom na ľubovoľný iný repér. Ako určiť súradnice bodu pri zmene repéru popisuje nasledujúci príklad.
môžeme vyjadriť aj vzhľadom na ľubovoľný iný repér. Ako určiť súradnice bodu pri zmene repéru popisuje nasledujúci príklad.
Pri závádzaní lineárnej súradnicovej sústavy sa v definícii nekládla požiadavka ortonormálnosti na repér
afinného priestoru . To znamená, že súradnice
nejakého bodu môžeme vyjadriť aj vzhľadom na ľubovoľný iný repér. Ako určiť súradnice bodu pri zmene repéru popisuje nasledujúci príklad.
Príklad.
- Nech
![\small S= \left\langle {Q[1,-2,1],\pmb a (1, 1, 2),\;\pmb b(-3, 2, 1),\;\pmb c (-2, 1, 0) }\right\rangle](https://lms.umb.sk/filter/tex/pix.php/3c5eb66f8a03443be87bde686244eded.png "\small S= \left\langle {Q[1,-2,1],\pmb a (1, 1, 2),\;\pmb b(-3, 2, 1),\;\pmb c (-2, 1, 0) }\right\rangle") je súradnicová sústava afinného
priestoru
je súradnicová sústava afinného
priestoru , f )") , kde zobrazenie je definované ako rozdiel súradníc bodov po zložkách. Nájdite
bod
, kde zobrazenie je definované ako rozdiel súradníc bodov po zložkách. Nájdite
bod  , ktorého súradnice vzhľadom k repéru sú
, ktorého súradnice vzhľadom k repéru sú ![\small [-2, 1, 2]](https://lms.umb.sk/filter/tex/pix.php/dc9121ac8fc58ff90745e1f3d6118867.png "\small [-2, 1, 2]") .
. - Nájdite súradnice bodu
![\small P = [4,-3,1]](https://lms.umb.sk/filter/tex/pix.php/fad406c20a268ba80726f0debea151a3.png "\small P = [4,-3,1]") vzhľadom k báze .
vzhľadom k báze .
Riešenie.
- Zrejme
![\small R = [1,-2,1]+(-2).(1, 1, 2) + 1(-3, 2, 1) + 2.(-2, 1, 0) = (-8, 0, -2)](https://lms.umb.sk/filter/tex/pix.php/f016c1c3a707de12152526046bbb004c.png "\small R = [1,-2,1]+(-2).(1, 1, 2) + 1(-3, 2, 1) + 2.(-2, 1, 0) = (-8, 0, -2)") .
.
Toto sú súradnice bodu vzhľadom k ortonormálnemu repéru - kanonické súradnice. Je dôležité dodržať poradie prvkov repéru . Urobte geometrickú interpretáciu.
vzhľadom k ortonormálnemu repéru - kanonické súradnice. Je dôležité dodržať poradie prvkov repéru . Urobte geometrickú interpretáciu. - Určiť súradnice vzhľadom k repéru znamená bod vyjadriť ako lineárnu kombináciu prvkov repéru .
Opäť treba dať pozor na poradie prvkov bázy. Musíme nájsť
 , pre ktoré platí:
, pre ktoré platí:
 + q_2.(-3, 2, 1) + q_3.(-2, 1, 0)") resp.
resp.
 = q_1.(1, 1, 2) + q_2.(-3, 2, 1) + q_3.(-2, 1, 0)") .
.
Úlohu môžeme riešiť ako sústavu rovníc (vyriešte úlohu týmto spôsobom).

Poslednú rovnosť môžeme vyjadriť v maticovom tvare (vektory repéru zapisujeme do stĺpcov!):
 \cdot \left(\begin{array}{ccc} \;3 \\ -1 \\ \;0 \end{array}\right) =
\left(\begin{array}{ccc} 1&-3&-2 \\ 1&\;2&\;1 \\ 2&\;1&\;0\end{array}\right) \cdot \left(\begin{array}{ccc} q_1 \\ q_2 \\q_3 \end{array}\right)") Riešením je bod
Riešením je bod ") .
.
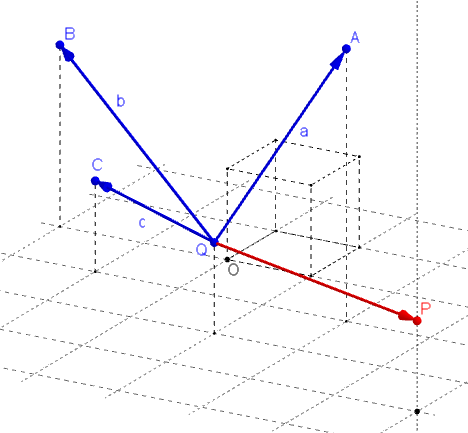
Cvičenie.
Zistite, aké súradnice má bod ∈ A^3") v afinnej súradnicovej sústave
v afinnej súradnicovej sústave ![\small [O;\pmb {e_1} ,\pmb {e_2} ,\pmb {e_3} ]](https://lms.umb.sk/filter/tex/pix.php/44d228191e592295cf515854200bd36d.png "\small [O;\pmb {e_1} ,\pmb {e_2} ,\pmb {e_3} ]") , ak
, ak
") ;
;
 ;
;
 .
.
Zistite, aké súradnice má bod
v afinnej súradnicovej sústave , ak
;
;
.
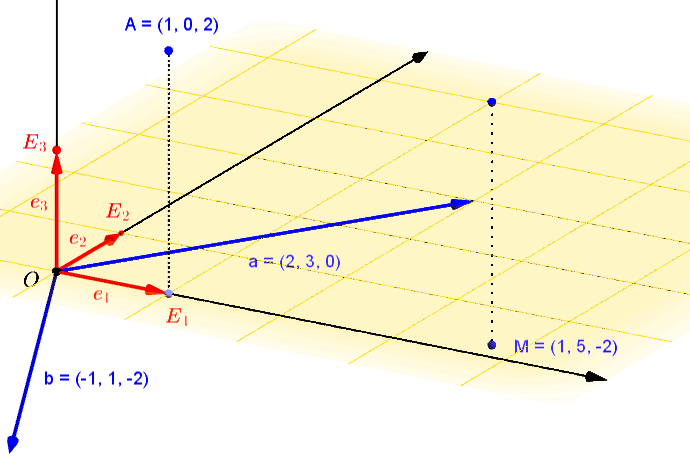
Riešenie.
- Algebraické riešenie: Dosaďte do výrazu
") hodnoty za
hodnoty za  a dostanete súradnice
a dostanete súradnice ![[1,5,-2]](https://lms.umb.sk/filter/tex/pix.php/ecdc55665c1fccb7a9d931f03454e170.png "[1,5,-2]") .
. - Grafické riešenie: V GeoGebre si aktivujte si repér
 .
Do vstupného poľa postupne zadajte , , a .
.
Do vstupného poľa postupne zadajte , , a .
\)
Afinný podpriestor
Zvoľme si v afinnom priestore ") jeden pevný bod a nejaké zameranie
jeden pevný bod a nejaké zameranie  , ktoré je podmnožinou vektorového zamerania
, ktoré je podmnožinou vektorového zamerania  . Dostaneme podmnožinu bodov afinného priestoru, ktorá bude spĺňať axiómy afinného priestoru. Takouto množinou je napríklad priamka v euklidovskej rovine alebo rovina v euklidovskom priestore.
. Dostaneme podmnožinu bodov afinného priestoru, ktorá bude spĺňať axiómy afinného priestoru. Takouto množinou je napríklad priamka v euklidovskej rovine alebo rovina v euklidovskom priestore.
jeden pevný bod a nejaké zameranie , ktoré je podmnožinou vektorového zamerania . Dostaneme podmnožinu bodov afinného priestoru, ktorá bude spĺňať axiómy afinného priestoru. Takouto množinou je napríklad priamka v euklidovskej rovine alebo rovina v euklidovskom priestore. Definícia (Afinný podpriestor).
Nech je afinný priestor nad poľom . Neprázdnu podmnožinu  nazývame afinný podpriestor resp. lineárna varieta afinného priestoru , ak existuje vektorový podpriestor
nazývame afinný podpriestor resp. lineárna varieta afinného priestoru , ak existuje vektorový podpriestor  , pričom platí
, pričom platí
Nech
je afinný priestor nad poľom . Neprázdnu podmnožinu nazývame afinný podpriestor resp. lineárna varieta afinného priestoru , ak existuje vektorový podpriestor , pričom platí
 \in \mathrm V'")
 \in \mathcal A'")
Dokážte, že , x \in \mathbb R\right\}") je afinný podpriestor priestoru
je afinný podpriestor priestoru ") ,
,
, x \in \mathbb R^4;x_4=1\right\}")
, x \in \mathbb R^4;x_4=0\right\}")
 je odčítanie po zložkách. [MON 1.4.1]
je odčítanie po zložkách. [MON 1.4.1]
je afinný podpriestor priestoru , je odčítanie po zložkách. [MON 1.4.1]Tvrdenie.
Nech![\small X= [x_1, x_2, \cdot \cdot \cdot x_n]](https://lms.umb.sk/filter/tex/pix.php/849e663d14ddce160818d00568aeb6ba.png "\small X= [x_1, x_2, \cdot \cdot \cdot x_n]") je ľubovoľný bod z afinného priestoru
je ľubovoľný bod z afinného priestoru  . Potom bod leží v podpriestore
. Potom bod leží v podpriestore  , práve vtedy, keď platí rovnosť
, práve vtedy, keď platí rovnosť
 ,
,
kde![\small A= [a_1, a_2, \cdot \cdot \cdot a_n] \in \mathcal A^k](https://lms.umb.sk/filter/tex/pix.php/6842e3db0adab2c2a859a2aef4c471cd.png "\small A= [a_1, a_2, \cdot \cdot \cdot a_n] \in \mathcal A^k") ;
;  sú reálne čísla a
sú reálne čísla a  je
je  lineárne nezávislých vektorov podpriestoru
lineárne nezávislých vektorov podpriestoru ") . Uvedená rovnosť sa nazýva parametrické vyjadrenie podpriestoru . Čísla
. Uvedená rovnosť sa nazýva parametrické vyjadrenie podpriestoru . Čísla  sa nazývajú parametre bodu .
sa nazývajú parametre bodu .
Nech
je ľubovoľný bod z afinného priestoru . Potom bod leží v podpriestore , práve vtedy, keď platí rovnosť , kde
; sú reálne čísla a je lineárne nezávislých vektorov podpriestoru . Uvedená rovnosť sa nazýva parametrické vyjadrenie podpriestoru . Čísla sa nazývajú parametre bodu . Poznámky.
Pre rovnosť sa tradične používa nie úplne presný názov parametrické rovnice podpriestoru. Parametrické rovnice podpriestoru majú známy tvar
sa tradične používa nie úplne presný názov parametrické rovnice podpriestoru. Parametrické rovnice podpriestoru majú známy tvar


...
 ,
,
kde sú súradnice bodu a ") sú súradnice vektora
sú súradnice vektora  v kanonickej báze
v kanonickej báze  . Túto sústavu rovníc môžeme zapísať pomocou matíc. Maticový tvar parametrických rovníc vyzerá takto
. Túto sústavu rovníc môžeme zapísať pomocou matíc. Maticový tvar parametrických rovníc vyzerá takto
 =\left( \begin{array}{} a_{1} \\ a_{2} \\ \;· \\ a_{n} \end{array} \right) +\left( \begin{array}{} a_{12} & a_{12} & ··· & a_{1k} \\ a_{22} & a_{22} & ··· & a_{2k} \\ \; ··· & \\ a_{n2} & a_{n2} & ··· & a_{nk} \end{array} \right) · \left( \begin{array}{} t_1 \\ t_2 \\ \;· \\ t_k \\ \end{array} \right)\\ \; \\")
Maticu sústavy z predchádzajúceho vyjadrenia nazývame matica prechodu od afinnej súradnicovej sústavy do sústavy
z predchádzajúceho vyjadrenia nazývame matica prechodu od afinnej súradnicovej sústavy do sústavy  .
.
Pre rovnosť
sa tradične používa nie úplne presný názov parametrické rovnice podpriestoru. Parametrické rovnice podpriestoru majú známy tvar ...
, kde
sú súradnice bodu a sú súradnice vektora v kanonickej báze . Túto sústavu rovníc môžeme zapísať pomocou matíc. Maticový tvar parametrických rovníc vyzerá takto Maticu sústavy
z predchádzajúceho vyjadrenia nazývame matica prechodu od afinnej súradnicovej sústavy do sústavy . Príklad 1.
Zistite, či body![\small M = [9, -2, 5], N = [4, 1, 6]](https://lms.umb.sk/filter/tex/pix.php/8a3cde48cba700d2cdcf1f273d3c9937.png "\small M = [9, -2, 5], N = [4, 1, 6]") incidujú s podpriestorom (ležia v podpriestore)
incidujú s podpriestorom (ležia v podpriestore)  . Dané sú bod
. Dané sú bod ![\small A = [1, 3, 2]](https://lms.umb.sk/filter/tex/pix.php/f7db82372dc4ba7d322d4d064720b97d.png "\small A = [1, 3, 2]") a vektory
a vektory , v = (1, -1, 0)") . Nájdite parametrické vyjadrenie tohto podpriestoru. Vytvorte grafickú ilustrácia k tomuto príkladu.
. Nájdite parametrické vyjadrenie tohto podpriestoru. Vytvorte grafickú ilustrácia k tomuto príkladu.
Zistite, či body
incidujú s podpriestorom (ležia v podpriestore) . Dané sú bod a vektory . Nájdite parametrické vyjadrenie tohto podpriestoru. Vytvorte grafickú ilustrácia k tomuto príkladu.Riešenie.
Hľadáme reálne čísla , pre ktoré platí rovnosť (vektorová rovnica má práve jedno riešenie)
, pre ktoré platí rovnosť (vektorová rovnica má práve jedno riešenie)
![\small [9, -2, 5]= [1, 3, 2]+ r(2, -1, 1)+ s (1, -1, 0)](https://lms.umb.sk/filter/tex/pix.php/987fedb1246681eac4577b8596ffe7df.png "\small [9, -2, 5]= [1, 3, 2]+ r(2, -1, 1)+ s (1, -1, 0)") resp.
resp.
![\small [4, 1, 6]= [1, 3, 2]+ r(2, -1, 1)+ s (1, -1, 0)](https://lms.umb.sk/filter/tex/pix.php/93de6ddda2e4e5ebafc0d01957f5e5fc.png "\small [4, 1, 6]= [1, 3, 2]+ r(2, -1, 1)+ s (1, -1, 0)")
Odpoveď.
Bod![\small M = [9, -2, 5]](https://lms.umb.sk/filter/tex/pix.php/17355fcb7bd4c548ef272f328bf5c9a2.png "\small M = [9, -2, 5]") inciduje s daným podpriestorom. Podrobné riešenie formou "step by step" prezentuje GeoGebra applet AfinneParametrickePr1 – GeoGebra.
inciduje s daným podpriestorom. Podrobné riešenie formou "step by step" prezentuje GeoGebra applet AfinneParametrickePr1 – GeoGebra.
Podobnou metódou ukážte, že bod![\small N = [4, 1, 6]](https://lms.umb.sk/filter/tex/pix.php/f2bd7784e5e4385754858ca3d595e26d.png "\small N = [4, 1, 6]") neleží v danom podpriestore.
neleží v danom podpriestore.
Hľadáme reálne čísla
, pre ktoré platí rovnosť (vektorová rovnica má práve jedno riešenie) resp. Odpoveď.
Bod
inciduje s daným podpriestorom. Podrobné riešenie formou "step by step" prezentuje GeoGebra applet AfinneParametrickePr1 – GeoGebra. Podobnou metódou ukážte, že bod
neleží v danom podpriestore.Neparametrické vyjadrenie podpriestoru
V afinnom priestore môžeme lineárne podpriestory  vyjadriť aj neparametricky pomocou sústavy
vyjadriť aj neparametricky pomocou sústavy  lineárnych rovníc s neznámymi. Ich počet je závislý od dimenzie podpriestoru a od dimenzie daného priestoru . Musí byť splnená rovnosť:
lineárnych rovníc s neznámymi. Ich počet je závislý od dimenzie podpriestoru a od dimenzie daného priestoru . Musí byť splnená rovnosť:  . V stredoškolskej analytickej geometrii
. V stredoškolskej analytickej geometrii
môžeme lineárne podpriestory vyjadriť aj neparametricky pomocou sústavy lineárnych rovníc s neznámymi. Ich počet je závislý od dimenzie podpriestoru a od dimenzie daného priestoru . Musí byť splnená rovnosť: . V stredoškolskej analytickej geometrii
- Priamka (
 ) ležiaca v rovine (
) ležiaca v rovine ( ) je vyjadrená jedinou lineárnou rovnicou s dvoma neznámymi. Bod (
) je vyjadrená jedinou lineárnou rovnicou s dvoma neznámymi. Bod ( ) je chápaný ako prienik dvoch priamok, teda môže byť vyjadrený ako sústava dvoch lineárnych rovníc.
) je chápaný ako prienik dvoch priamok, teda môže byť vyjadrený ako sústava dvoch lineárnych rovníc. - V afinnom priestore
 rovina (nadrovina (
rovina (nadrovina ( )) je vyjadrená jedinou lineárnou rovnicou s troma neznámymi
)) je vyjadrená jedinou lineárnou rovnicou s troma neznámymi  . Priamka je prienikom dvoch rovín a na jej určenie sú potrebné dve rovnice
. Priamka je prienikom dvoch rovín a na jej určenie sú potrebné dve rovnice  .
.
Príklad 2.
Nájdite parametrické aj neparametrické vyjadrenie roviny v, ktorá prechádza bodom ![\small A = [1, 2,3]](https://lms.umb.sk/filter/tex/pix.php/d9be5bff457cbec833831928a2dfd25a.png "\small A = [1, 2,3]") a má smer
a má smer ,\vec{v}=(2,-1,0)") .
.
Nájdite parametrické aj neparametrické vyjadrenie roviny v
, ktorá prechádza bodom a má smer .Riešenie
Podobne ako v príklade 1 použijeme metódu "step by step" AfinnePodpriestoryPr2 – GeoGebra.
Vytvorte grafickú ilustrácia k tomuto príkladu.
Podobne ako v príklade 1 použijeme metódu "step by step" AfinnePodpriestoryPr2 – GeoGebra.
Vytvorte grafickú ilustrácia k tomuto príkladu.
Pre lineárny podpriestor platí, že s každými dvoma bodmi  obsahuje tento podpriestor aj bod
obsahuje tento podpriestor aj bod
;\;t \in \mathbb R") .
.
Dôkaz tohto tvrdenia sa robí v základnom kurze z lineárnej algebry.
obsahuje tento podpriestor aj bod . Dôkaz tohto tvrdenia sa robí v základnom kurze z lineárnej algebry.
Lineárne podpriestory s danou dimenziou.
- Afinný podpriestor dimenzie 1 sa nazýva afinnou priamka.
- Afinný podpriestor dimenzie 2 sa nazýva afinnou rovina.
- Afinný podpriestor dimenzie -1 v -rozmernom afinnom priestore sa nazýva nadrovina . Zrejme priamka je zároveň nadrovinou v priestore
 a rovina je nadrovinou v .
a rovina je nadrovinou v . - Budeme hovoriť, že podpriestor
") je -rozmerný (má dimenziu ), ak podpriestor
je -rozmerný (má dimenziu ), ak podpriestor  má dimenziu (dim
má dimenziu (dim  ).
).
Príklady.
- Napíšte parametrické vyjadrenie podpriestoru v
 , ktorý je daný všeobecnými rovnicami:
, ktorý je daný všeobecnými rovnicami:

- Dokážte, že množina
 \in \mathbb R^3; x + y - 2z = 5, x - y = 1}\rbrace")
je priamkou v afinnom priestore
 \in R^3; x_1 + x_2 - 2x_3 = 5}\rbrace , V^3(\mathbb R) = \lbrace{(x_1, x_2, x_3) \in \mathbb R^3; x_1 + x_ 2 - 2x_3 = 0}\rbrace") .
.
Uveďte parametrické vyjadrenie tejto množiny a overte, že množina bodov spĺňa afinné axiómy.
Riešenie.
- Otvorte si riešenie prvého príkladu formou appletu AfinnePodpriestory_Priklady1 – GeoGebra.
- Zobrazte roviny
 \in \mathbb R^3; x + y - 2z = 5}\rbrace") ,
,  \in \mathbb R^3; x - y = 1}\rbrace") .
.
Grafická ukážka priamky ako priesečnice dvoch rôznobežných rovín formou 3D appletu https://www.geogebra.org/m/qsxrwku2.
\)Vzájomná poloha útvarov
Táto kapitola sa zameriava na typológiu vzájomných polôh afinných útvarov – prieniky, rovnobežnosť, rôznobežnosť a mimobežnosť – najmä v priestore, ale aj v rovine. V centre pozornosti sú afinné podpriestory a ich vzťahy cez smerové priestory. Zahrnuté sú praktické príklady a úlohy s odpovedajúcimi rovnicami priamok a rovín.
Lineárne podpriestory, ktorých prienik je prázdna množina, nazývame disjunktné. Hovoríme aj, že takého podpriestory sa nepretínajú. Ak nie sú dva podpriestory disjunktné, potom sú nedisjunktné (pretínajú sa, majú neprázdny prienik).
Lineárne podpriestory, ktorých prienik je prázdna množina, nazývame disjunktné. Hovoríme aj, že takého podpriestory sa nepretínajú. Ak nie sú dva podpriestory disjunktné, potom sú nedisjunktné (pretínajú sa, majú neprázdny prienik).
Tvrdenie.
Nech, \mathbb A^s=(\mathcal A_2,V_2,+)") sú lineárne podpriestory priestoru
sú lineárne podpriestory priestoru  a
a  sú ich smerové podpriestory. Potom platia nasledovné tvrdenia:
sú ich smerové podpriestory. Potom platia nasledovné tvrdenia:
Nech
sú lineárne podpriestory priestoru a
sú ich smerové podpriestory. Potom platia nasledovné tvrdenia:
- Neprázdny prienik podpriestorov
 a
a  je podpriestor, ktorého smer je prienikom
je podpriestor, ktorého smer je prienikom  .
. - Ak je prienik podpriestorov neprázdny
 a platí, že
a platí, že  ,
tak podpriestor
,
tak podpriestor  .
.
Lineárne podpriestory sa nazývajú:
- Rovnobežné, ak všetky smerové vektory jedného podpriestoru sú smerovými vektormi druhého.
- Rôznobežné, ak majú spoločný aspoň jeden bod a žiadny z podpriestorov nie je podmnožinou druhého.
- Mimobežné, ak sú disjunktné a prienik smerových podpriestorov obsahuje len nulový vektor.
Príklady.
Zistite, aká je vzájomná poloha priamok
Zistite, aká je vzájomná poloha priamok



Riešenie.
- Smerové vektory priamok
 sú lineárne závislé, preto
sú lineárne závislé, preto  uvažované priamky sú navzájom rovnobežné.
uvažované priamky sú navzájom rovnobežné. - Ak priamky
 majú spoločný bod
majú spoločný bod ![\small P=[x_p,y_p,z_p]](https://lms.umb.sk/filter/tex/pix.php/83a68aa679fa29469463fc9b21409025.png "\small P=[x_p,y_p,z_p]") , tak existuje parameter
, tak existuje parameter  , ktorý je riešením sústavy
, ktorý je riešením sústavy

a zároveň súradnice![\small [3+t,1+t,2-t]](https://lms.umb.sk/filter/tex/pix.php/56153ef98a98308b3fa1f3eca85cc0dd.png "\small [3+t,1+t,2-t]") tohto spoločného bodu priamky
tohto spoločného bodu priamky  s priamkou
s priamkou  musia byť riešením sústavy rovníc
musia byť riešením sústavy rovníc
+(1+t)+(2-t)-5=0\\ \small (3+t)-(1+t)+2(2-t)-8=0")
čiže
ktorá má jediné riešenie . Prienikom priamok je teda bod
. Prienikom priamok je teda bod ![\small [2 ,0 ,3 ]](https://lms.umb.sk/filter/tex/pix.php/c7b0b29edf087c5e7bf65905c8dfe3b5.png "\small [2 ,0 ,3 ]") a preto sú priamky rôznobežné.
a preto sú priamky rôznobežné. - Odpovedajúca sústava nemá riešenie a spoločné vektory sú LN, priamky sú mimobežné
\)
Euklidovský priestor
Rozšírením afinnej štruktúry (afinného priestoru) o metrické prvky zavedením skalárneho súčinu, vzniká euklidovský priestor. Tento priestor je východiskom k metrickej geometrii, v ktorej okrem polohových úloh dokážeme aj "merať".
Vektorový priestor, na ktorom je definovaný skalárny súčin (tiež nazývaný aj vnútorný súčin) umožňuje rozumne definovať metrické pojmy vzdialenosť a veľkosť uhla, čím v euklidovskom priestore vzniká geometrická metrika. Uvedieme riešené príklady s výpočtom vzdialenosti dvoch bodov, určenie súradníc stredu úsečky a úvahy o polohe bodov na úsečke, ktoré sú didakticky účinné.
Vektorový priestor, na ktorom je definovaný skalárny súčin (tiež nazývaný aj vnútorný súčin) umožňuje rozumne definovať metrické pojmy vzdialenosť a veľkosť uhla, čím v euklidovskom priestore vzniká geometrická metrika. Uvedieme riešené príklady s výpočtom vzdialenosti dvoch bodov, určenie súradníc stredu úsečky a úvahy o polohe bodov na úsečke, ktoré sú didakticky účinné.
Euklidovský priestor je -rozmerný afinný priestor so zameraním a s vyššie
definovaným skalárnym súčinom; označovať’ ho budeme symbolom  .
.
-rozmerný afinný priestor so zameraním a s vyššie
definovaným skalárnym súčinom; označovať’ ho budeme symbolom .
Táto definícia presne vystihuje podstatu -rozmerného euklidovského priestoru ako afinného priestoru so skalárnym súčinom na jeho zameraní. Pripomíname a zdôrazňujeme, že norma vektora je definovaná ako funkcia indukovaná skalárnym súčinom, čo je kľúčové pre geometriu euklidovského priestoru. Normu sme popísali v kapitole Cauchy-Schwarzova nerovnosť.
-rozmerného euklidovského priestoru ako afinného priestoru so skalárnym súčinom na jeho zameraní. Pripomíname a zdôrazňujeme, že norma vektora je definovaná ako funkcia indukovaná skalárnym súčinom, čo je kľúčové pre geometriu euklidovského priestoru. Normu sme popísali v kapitole Cauchy-Schwarzova nerovnosť.
Definícia (Súradnicová sústava).
Lineárnu súradnicovú sústavu v danú repérom
danú repérom  nazývame
karteziánskou súradnicovou sústavou, ak
nazývame
karteziánskou súradnicovou sústavou, ak  je ortonormálna báza
zamerania .
je ortonormálna báza
zamerania .
Lineárnu súradnicovú sústavu v
danú repérom nazývame
karteziánskou súradnicovou sústavou, ak je ortonormálna báza
zamerania .
Budeme používať označenie súradníc bodu: ![\small X[x_1, x_2, . . . , x_n]](https://lms.umb.sk/filter/tex/pix.php/eba92bf93a3de0a9032b7ed7172dbbd8.png "\small X[x_1, x_2, . . . , x_n]") (hraranté zátvorky) a označenie súradníc vektora:
(hraranté zátvorky) a označenie súradníc vektora: ") (okrúhle zátvorky) v karteziánskej súradnicovej sústave.
(okrúhle zátvorky) v karteziánskej súradnicovej sústave.
(hraranté zátvorky) a označenie súradníc vektora:
(okrúhle zátvorky) v karteziánskej súradnicovej sústave.
Definícia (Vzdialenosť bodov).
Pod vzdialenosťou dvoch bodov euklidovského priestoru rozumieme normu prislúchajúceho vektora
euklidovského priestoru rozumieme normu prislúchajúceho vektora  , t.j.
, t.j.
 = ||Y-X||= ||\vec{v} || = \sqrt{\overrightarrow{XY}. \overrightarrow{XY}}") .
.
Pod vzdialenosťou dvoch bodov
euklidovského priestoru rozumieme normu prislúchajúceho vektora , t.j.
.
Dokážte.
- Pre ľubovoľné tri body
 platí
platí

(Poznamenajme, že zápis znamená, že bod
znamená, že bod  patrí úsečke
patrí úsečke  , čo znamená, že existuje parameter
, čo znamená, že existuje parameter ") , taký, že
platí
, taký, že
platí ") .)
.) - Bod
 je stredom dvojice bodov
je stredom dvojice bodov  práve vtedy, keď
práve vtedy, keď  .
.
Tvrdenie.
Nech je nadrovina v
je nadrovina v  . Označme vektor
. Označme vektor ") . Potom:
. Potom:
Nech Nech
je nadrovina v . Označme vektor . Potom:
- Vektor
 je nenulový.
je nenulový. - Vektor je kolmý na každý vektor zo zamerania
 .
. - Každý vektor, ktorý je kolmý na , je násobkom vektora .
 sú nadroviny euklidovského priestoru . Potom sú rovnobežné nadroviny práve vtedy, keď ich normálové
vektory sú lineárne závislé.
sú nadroviny euklidovského priestoru . Potom sú rovnobežné nadroviny práve vtedy, keď ich normálové
vektory sú lineárne závislé.
Vektor
sa nazýva normálový vektor nadroviny  (normálový vektor nadroviny budeme označovať aj
(normálový vektor nadroviny budeme označovať aj  ).
).
Definícia (uhol dvoch euklidovských podpriestorov).
 nazývame uhol priamok
nazývame uhol priamok  , ak:
, ak:
 kde
kde ![\small V_a = [\vec a]](https://lms.umb.sk/filter/tex/pix.php/29f672a037d2b2318c9c68d6767e53ee.png "\small V_a = [\vec a]") ,
, ![\small V_b = [\vec b]](https://lms.umb.sk/filter/tex/pix.php/7763fa4fe8aabc7853e7d6194d86fe0f.png "\small V_b = [\vec b]") .
.
- Uhol priamky a podpriestoru
 :
:
 := \begin{cases}
\frac{\pi}{2}, & \text{ak } p \perp \mathbb E'_k \\
\angle( \vec p, \vec p^*), & \text{ak } p \not\perp \mathbb E'_k
\end{cases}")
kde je ortogonálny priemet smerového vektora
je ortogonálny priemet smerového vektora  priamky do podpriestoru
priamky do podpriestoru  .
.
- Uhol podpriestoru a nadroviny
 :
:
:=")
")
Cvičenie.
Zdôvodnite:
- Ak
![\small X[x_1, x_2, . . . , x_n], Y[y_1, y_2, . . . , y_n]](https://lms.umb.sk/filter/tex/pix.php/ee47d2ebc7acb78d1f6461b34b6f294a.png "\small X[x_1, x_2, . . . , x_n], Y[y_1, y_2, . . . , y_n]") sú súradnice bodov v karteziánskej súradnicovej sústave, tak pre vzdialenosť bodov platí
sú súradnice bodov v karteziánskej súradnicovej sústave, tak pre vzdialenosť bodov platí
^2 + (y_2-x_2)^2 + \dots+ (y_n - x_n)^2} .") .
. - Bod
 je stredom dvojice bodov
je stredom dvojice bodov  práve vtedy, ked’
práve vtedy, ked’  .
.
- Vypočítajte veľkosť vektora , ak .
\)
Príklad
Príklad - Zbierka (MOZ, 2016) Úloha 1.4.11
Napíšte parametrické aj neparametrické vyjadrenie roviny , ktorá prechádza bodom
, ktorá prechádza bodom ![\small A[2, 3, -1]](https://lms.umb.sk/filter/tex/pix.php/c8111be73101c84853371f119734d99a.png "\small A[2, 3, -1]") a je rovnobežná s priamkami
a je rovnobežná s priamkami  , ktorých parametrické vyjadrenia sú:
, ktorých parametrické vyjadrenia sú:


Napíšte parametrické aj neparametrické vyjadrenie roviny
, ktorá prechádza bodom a je rovnobežná s priamkami , ktorých parametrické vyjadrenia sú:
Riešenie.
1. Smerový vektor priamky je
je ") a smerový vektor priamky
a smerový vektor priamky  je
je ") .
.
2. Vektorový súčin na získanie normálového vektora roviny. Normálový vektor roviny je kolmý na oba smerové vektory priamok a .
Vypočítame:
na získanie normálového vektora roviny. Normálový vektor roviny je kolmý na oba smerové vektory priamok a .
Vypočítame:

 - 2 \cdot 1) - \mathbf{j}((-1) \cdot (-3) - 2 \cdot 4) + \mathbf{k}((-1) \cdot 1 - 3 \cdot 4)")
 - \mathbf{j}(3 - 8) + \mathbf{k}(-1 - 12)")
 - \mathbf{j}(-5) + \mathbf{k}(-13)")
![\small \vec{n} = [-11, 5, -13]](https://lms.umb.sk/filter/tex/pix.php/e0c38fecd3dc6e63bf99bea87270020c.png "\small \vec{n} = [-11, 5, -13]")
Rovnica roviny :
je daná tvarom:
:
je daná tvarom:
+b(y-y_0)+c(z-z_0 )=0") ,
kde
,
kde ![\small [x_0,y_0,z_0]](https://lms.umb.sk/filter/tex/pix.php/b18d618fb9f1a8de25c15e1d2824fb90.png "\small [x_0,y_0,z_0]") je bod v rovine (v našom prípade bod
je bod v rovine (v našom prípade bod ![\small A = [2, 3, -1]](https://lms.umb.sk/filter/tex/pix.php/ea0b1ee55cfecbb7ff4ce7678168822b.png "\small A = [2, 3, -1]") ), a
), a  sú zložky normálneho vektora . Dosadením do všeobecnej rovnice roviny dostaneme:
sú zložky normálneho vektora . Dosadením do všeobecnej rovnice roviny dostaneme:
+5(y-3)-13(z+1)=0") odkiaľ všeobecná rovnica roviny je:
odkiaľ všeobecná rovnica roviny je:
 .
.
1. Smerový vektor priamky
je a smerový vektor priamky
je .
2. Vektorový súčin
na získanie normálového vektora roviny. Normálový vektor roviny je kolmý na oba smerové vektory priamok a .
Vypočítame:
Rovnica roviny
:
Neparametrické - vyjadrenie roviny resp. všeobecný tvar.
Všeobecná rovnica roviny resp. všeobecný tvar.
je daná tvarom:
,
je bod v rovine (v našom prípade bod ), a sú zložky normálneho vektora . Dosadením do všeobecnej rovnice roviny dostaneme:
je: .
Parametrické - vyjadrenie roviny .
Parametrické vyjadrenie roviny .
je:
 = A + s\vec{v_p} + t\vec{v_q}") ,
,
![\small A = [2, 3, -1]](https://lms.umb.sk/filter/tex/pix.php/f809fc45b086846c927783a94a7c4925.png "\small A = [2, 3, -1]") ,
, ![\small \vec{v_p} = [-1, 3, 2]](https://lms.umb.sk/filter/tex/pix.php/f557078935b638917edf8b146571297a.png "\small \vec{v_p} = [-1, 3, 2]") a
a ![\small \vec{v_q} = [4, 1, -3]](https://lms.umb.sk/filter/tex/pix.php/10bb76be8f118c4f217df3ada20ef490.png "\small \vec{v_q} = [4, 1, -3]") .
.
Parametrické vyjadrenie:

\begin{cases}
x_1 = 2 - s + 4t \\
x_2 = 3 + 3s + t \\
x_3 = -1 + 2s - 3t
\end{cases}")
 .
\)
.
\)
Lineárna kombinácia bodov
V tejto kapitole zavedieme koncept lineárnej (resp. afinnej, barycentrickej) kombinácie bodov ako kľúčového nástroja v afinnom a euklidovskom priestore. Výklad vychádza z definície cez vektory a ukazuje korektnosť tejto definície z hľadiska nezávislosti od zvoleného referenčného bodu.
Nech je -rozmerný euklidovský priestor so zameraním a nech
je -rozmerný euklidovský priestor so zameraním a nech  sú body tohto
euklidovského priestoru.
sú body tohto
euklidovského priestoru.
Nech
je -rozmerný euklidovský priestor so zameraním a nech sú body tohto
euklidovského priestoru.
Definícia.
Afinná (barycentrická resp. lineárna) kombinácia bodov. Nech , tak
súčtom (afinnou kombináciou bodov)
, tak
súčtom (afinnou kombináciou bodov)  rozumieme bod
rozumieme bod
(AK) + · · · + \alpha_m(P_m − P)") ,
,
pričom pre musí platiť
musí platiť  .
.
Afinná (barycentrická resp. lineárna) kombinácia bodov. Nech
, tak
súčtom (afinnou kombináciou bodov) rozumieme bod
(AK)
,
pričom pre
musí platiť .
Symbolický zápis afinnej kombinácie bodov  .
.
Treba ukázať, že afinná kombinácia (AK) nezávisí od voľby bodu
.
Nech
 a nech
a nech  je ľubovoľný bod (uvedomte si, že je tiež afinným priestorom. Upravujme afinnú kombináciu
je ľubovoľný bod (uvedomte si, že je tiež afinným priestorom. Upravujme afinnú kombináciu
 + \cdot \cdot \cdot +\alpha_m(P_m-Q) =")
aplikovaním tvrdenia
") dostaneme
dostaneme
 + \alpha_1(P_1-(P+(Q-P)) + \cdot \cdot \cdot +\alpha_m(P_m-(P+(Q-P)) =")
 - \alpha_1(Q-P) + \cdot \cdot \cdot - \alpha_m(Q-P)+ \alpha_1(P_1-P) + \cdot \cdot \cdot + \alpha_m(P_m-P) =")
![\small=P + (Q-P)- [(\alpha_1 + \cdot \cdot \cdot + \alpha_m)(Q - P)] + [\alpha_1(P_1 - P) + \cdot \cdot \cdot + \alpha_m(P_m - P)] =](https://lms.umb.sk/filter/tex/pix.php/990274bd238b1e5772ccef057aa486e9.png "\small=P + (Q-P)- [(\alpha_1 + \cdot \cdot \cdot + \alpha_m)(Q - P)] + [\alpha_1(P_1 - P) + \cdot \cdot \cdot + \alpha_m(P_m - P)] =")
![\small = P + [(Q-P)- 1 . (Q − P)]+ [\alpha_1(P_1 - P) + \cdot \cdot \cdot + \alpha_m(P_m - P)] =](https://lms.umb.sk/filter/tex/pix.php/8af6504c326498a435d4fe3426f65986.png "\small = P + [(Q-P)- 1 . (Q − P)]+ [\alpha_1(P_1 - P) + \cdot \cdot \cdot + \alpha_m(P_m - P)] =")
 + \cdot \cdot \cdot + \alpha_m(P_m − P)") .
.
Tým je dôkaz ukončený.
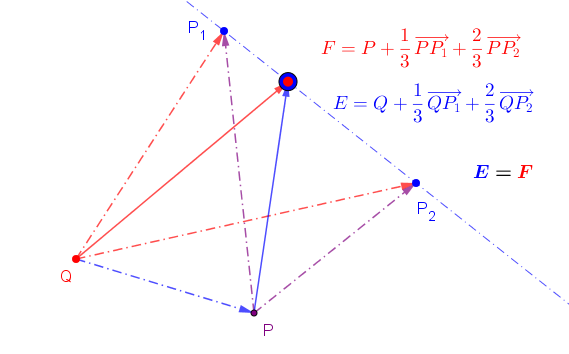
Usporiadaná množina bodov  afinného priestoru
afinného priestoru  sa nazýva simplex
priestoru , kde
sa nazýva simplex
priestoru , kde
 .
.
afinného priestoru sa nazýva simplex
priestoru , kde
 je repér priestoru ,
je repér priestoru ,  sú ortonormálové vektory.
Ľubovoľný bod
sú ortonormálové vektory.
Ľubovoľný bod
 má v tomto repéri súradnice
má v tomto repéri súradnice ![\small [x_1, . . . , x_n]](https://lms.umb.sk/filter/tex/pix.php/4a8ded17926937e08716405dcff18ab2.png "\small [x_1, . . . , x_n]") .
.
.
.
Veta (Bod ako kombinácia simplexu).
Ľubovoľný bod sa dá jednoznačne vyjadriť v tvare
sa dá jednoznačne vyjadriť v tvare
 ,
,
kde a je simplex afinného priestoru .
a je simplex afinného priestoru .
Ľubovoľný bod
sa dá jednoznačne vyjadriť v tvare
,
kde
a je simplex afinného priestoru .
Dôkaz.
Z vlastnosti (AP1) afinného priestoru vyplýva, že pre ľubovoľný (každý) bod platí
platí
(Q) .
.
Vektor vzhľadom na repér sa dá jednoznačne vyjadriť
ako lineárna kombinácia
vzhľadom na repér sa dá jednoznačne vyjadriť
ako lineárna kombinácia  .
.
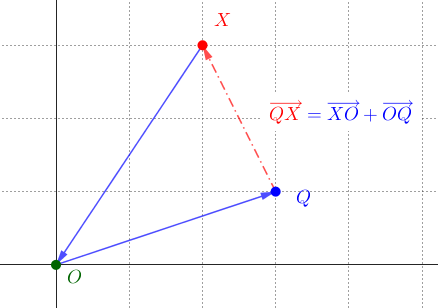 Využitím vzťahov
Využitím vzťahov  upravme vzťah (Q)
upravme vzťah (Q)
+...+ x_n(\overrightarrow{OQ}+\overrightarrow{QE_n})") ,
,
odkiaľ
\overrightarrow{OQ}+x_1\overrightarrow{QE_1}+ . . . + x_n\overrightarrow{QE_n}") .
.
Bez ujmy na obecnosti položme resp. označme") . Potom dostaneme
. Potom dostaneme
(Q-O)+x_1(E_1-Q)+ . . . + x_n(E_n-Q)")
Na základe tvrdenia " Operácie s bodmi" môžeme písať
+(x_1E_1+ . . . + x_nE_n)")
+x_0O+Q-x_0Q -(x_1Q+ . . . + x_nQ)+(x_1E_1+ . . . + x_nE_n)")
![\small X=x_0O+[(1-x_0) -(x_1+ . . . + x_n)]Q+(x_1E_1+ . . . + x_nE_n)](https://lms.umb.sk/filter/tex/pix.php/e608c1396cc05caa855420525c38b6ea.png "\small X=x_0O+[(1-x_0) -(x_1+ . . . + x_n)]Q+(x_1E_1+ . . . + x_nE_n)") .
.
Teraz si stačí uvedomiť, že![[(1-x_0) -(x_1+ . . . + x_n)]=0](https://lms.umb.sk/filter/tex/pix.php/fc6ebc4c5251a193d95128e27deae29a.png "[(1-x_0) -(x_1+ . . . + x_n)]=0") . Potom dostaneme
. Potom dostaneme
") .
.
Tým je dôkaz ukončený.
Z vlastnosti (AP1) afinného priestoru vyplýva, že pre ľubovoľný (každý) bod
platí
(Q)
.
Vektor
vzhľadom na repér sa dá jednoznačne vyjadriť
ako lineárna kombinácia .
upravme vzťah (Q)
,
odkiaľ
.
Bez ujmy na obecnosti položme resp. označme
. Potom dostaneme
Na základe tvrdenia " Operácie s bodmi" môžeme písať
.
Teraz si stačí uvedomiť, že
. Potom dostaneme. Tým je dôkaz ukončený.
Pretože rovnosti v dôkaze predošlej vety nezávisia na voľbe bodu  , tak ku každému usporiadanému simplexu a bodu afinného priestoru existuje jediná sústava skalárov
, tak ku každému usporiadanému simplexu a bodu afinného priestoru existuje jediná sústava skalárov  tak,
že platí rovnosť uvedená v tejto vete. Zrejme platí aj obrátená veta: Každá sústava skalárov
tak,
že platí rovnosť uvedená v tejto vete. Zrejme platí aj obrátená veta: Každá sústava skalárov  jednoznačne určuje bod , pre ktorý platí tvrdenie vety.
jednoznačne určuje bod , pre ktorý platí tvrdenie vety.
, tak ku každému usporiadanému simplexu a bodu afinného priestoru existuje jediná sústava skalárov tak,
že platí rovnosť uvedená v tejto vete. Zrejme platí aj obrátená veta: Každá sústava skalárov
jednoznačne určuje bod , pre ktorý platí tvrdenie vety.
Z dôkazu predchádzajúcej vety vyplýva, že súčet  je rovný jednej. Preto podmienka
je rovný jednej. Preto podmienka  v definícii afinnej kombinácii bodov je dôležitá a nutná.
v definícii afinnej kombinácii bodov je dôležitá a nutná.
je rovný jednej. Preto podmienka v definícii afinnej kombinácii bodov je dôležitá a nutná.
Cvičenie.
- Nech
 sú dva rôzne body. Zistite, aký bod predstavuje lineárna kombinácia
sú dva rôzne body. Zistite, aký bod predstavuje lineárna kombinácia  .
. - Nech
 sú tri nekolineárne body. Zistite, ktorý bod predstavuje lineárna kombinácia
sú tri nekolineárne body. Zistite, ktorý bod predstavuje lineárna kombinácia
 . Vyjadrite pomocou lineárnej kombinácie vrcholov trojuholníka
. Vyjadrite pomocou lineárnej kombinácie vrcholov trojuholníka  ľubovoľný vnútorný bod tohto trojuholníka.
ľubovoľný vnútorný bod tohto trojuholníka. - ♥ Vyjadrite pomocou lineárnej kombinácie nezávislých bodov
 ľubovoľný bod podpriestoru
ľubovoľný bod podpriestoru  určeného týmito bodmi.[Poznámka: lineárne nezávislé body sú také, pre ktoré napr. vektory
určeného týmito bodmi.[Poznámka: lineárne nezávislé body sú také, pre ktoré napr. vektory  sú nezávislé.]
sú nezávislé.]
Riešenie.
- Upravujme
") ,
,
čo predstavuje stred úsečky . Zobrazte túto situáciu v GeoGebre.
. Zobrazte túto situáciu v GeoGebre. - Znázornite túto situáciu v GeoGebre, otvorte si zadanie Tu. Riešenie Tu.
- Podľa vety "bod ako kombinácia simplexu" pre bod podpriestoru a vlastností simplexu
 platí
platí
(Mx) ,
,
kde súčet je rovný jednej. Vzťah (Mx) predstavuje bod podpriestoru .
- Pre podpriestor
 množina všetkých bodov spĺňajúcich podmienku (Mx) je zrejme priamka (útvar určený dvoma nezávislými bodmi).
Jej parametrické vyjadrenie má tvar
množina všetkých bodov spĺňajúcich podmienku (Mx) je zrejme priamka (útvar určený dvoma nezávislými bodmi).
Jej parametrické vyjadrenie má tvar
") .
.
Po úprave dostaneme \cdot A_0+t \cdot A_1") ,
,
čo predstavuje lineárnu kombináciu bodov .
. - Pre podpriestor
 to bude rovina (útvar určený tromi nezávislými bodmi). Jej parametrické vyjadrenie má
tvar
to bude rovina (útvar určený tromi nezávislými bodmi). Jej parametrické vyjadrenie má
tvar +s(A_2-A_0)") .
.
Po úprave dostaneme \cdot A_0+r \cdot A_1 +s \cdot A_2") ,
,
čo predstavuje lineárnu kombináciu bodov .
.
- Pre podpriestor
\)
Deliaci pomer
V axiomaticky zavedenej Euklidovskej geometrii dôležitú úlohu zohrávajú aj axiómy usporiadania. Na zavedenie metriky na priamke potrebujeme okrem polohových axióm usporiadania aj pojem deliaci pomer troch kolineárnych bodov. Jeho cieľom je ukázať vzťah medzi geometrickým umiestnením bodov a ich algebraickým vyjadrením v afinnom priestore. Uvedieme presne formulovanú definíciu deliaceho pomeru a jej algebraický zápis.
Definícia (Deliaci pomer bodov).
Nech a
a  sú tri kolineárne body. Deliacim pomerom bodov
sú tri kolineárne body. Deliacim pomerom bodov  (v tomto poradí) nazývame reálne
číslo
(v tomto poradí) nazývame reálne
číslo  také, že
také, že
(DP) = \lambda (C-B)") .
.
Budeme ho označovať") .
.
Nech
a sú tri kolineárne body. Deliacim pomerom bodov (v tomto poradí) nazývame reálne
číslo také, že
(DP)
.
Budeme ho označovať
.
Vypočítajte
, ak:
, ak:
![\small A = [1, 0, 1], B = [1, 3, -2], C = [1, -3, 4]](https://lms.umb.sk/filter/tex/pix.php/9357e6163937d339ddb9873c6f64ea12.png "\small A = [1, 0, 1], B = [1, 3, -2], C = [1, -3, 4]")
![\small A = [1, 1, 1], B = [2, 0, -1], C = AB \cap \alpha , \alpha : 2x -3y + 2z = 0](https://lms.umb.sk/filter/tex/pix.php/3fe1a88879f544bf32fac05aaf94bcc7.png "\small A = [1, 1, 1], B = [2, 0, -1], C = AB \cap \alpha , \alpha : 2x -3y + 2z = 0")
![\small A = [1, -1], B = A + 2\vec u, C = A- \vec u, \vec u = (1, 2).](https://lms.umb.sk/filter/tex/pix.php/982c567b39f78a847677a6718229ff13.png "\small A = [1, -1], B = A + 2\vec u, C = A- \vec u, \vec u = (1, 2).")
Riešenie.
-
Najskôr je nutné zistiť, či body
 sú kolineárne.
Pre deliaci pomer
sú kolineárne.
Pre deliaci pomer  musí platiť:
musí platiť:
()
= \lambda \cdot (C-B) \Leftrightarrow \overrightarrow{AC} =\lambda \cdot \overrightarrow{BC}") .
.
Potom môžeme spočítať
![\small \vec{u}=\overrightarrow{AC}=\left([1, -3, 4]-[1, 0, 1]\right) =(0,-3,3);\vec{v}=\overrightarrow{BC}\left([1, 3, -2]-[1, -3, 4] \right) =( 0,-6 ,6)](https://lms.umb.sk/filter/tex/pix.php/e5c9cd04bb4e1e22d826351c2a22f340.png "\small \vec{u}=\overrightarrow{AC}=\left([1, -3, 4]-[1, 0, 1]\right) =(0,-3,3);\vec{v}=\overrightarrow{BC}\left([1, 3, -2]-[1, -3, 4] \right) =( 0,-6 ,6)") .
.
Po dosadení do vzťahu () dostaneme  .
. - Najskôr určte súradnice priesečníka
 priamky
priamky  a roviny
a roviny  . Rovnica
priamky je daná parametricky
. Rovnica
priamky je daná parametricky
=
\left(\begin{matrix}
t+1 \\
-t+1 \\
-2t+1
\end{matrix}\right)")
Po dosadení do všeobecnej rovnice roviny určíme riešenie
určíme riešenie  . Spoločný bod
. Spoločný bod  má súradnice
má súradnice ![\small [0,2,3]](https://lms.umb.sk/filter/tex/pix.php/632489b694fb563d57a0e3ea6a4d43c4.png "\small [0,2,3]") .
.
- Najskôr určte súradnice bodov
 .
.
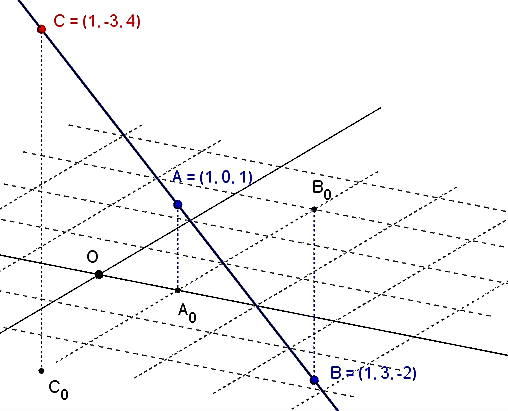
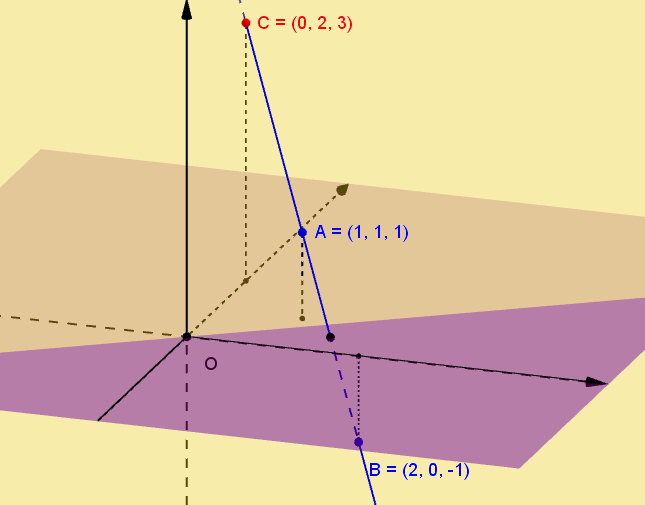
Nasledujúce obrázky dokumentujú vzťah deliaceho pomeru pre pevne zvolené body  a premenlivý bod . Tento vzťah predstavuje hyperbolickú funkciu.
a premenlivý bod . Tento vzťah predstavuje hyperbolickú funkciu.
a premenlivý bod . Tento vzťah predstavuje hyperbolickú funkciu.
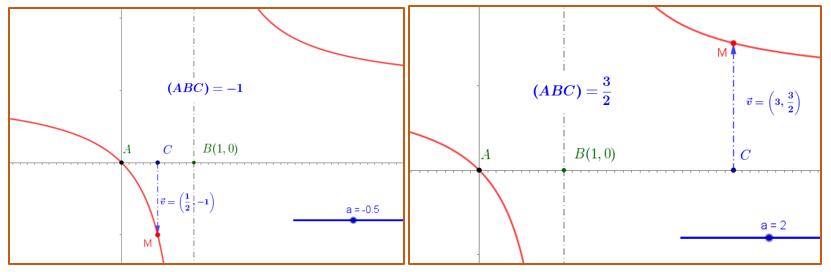
Tvrdenie (Vzťah deliaceho pomeru a lineárnej kombinácie).
Nech bod je lineárnou kombináciou bodov , ktorá má tvar A + \lambda B,\; \lambda \neq 1") . Potom pre deliaci pomer platí:
. Potom pre deliaci pomer platí:
(DP1) = \large \frac{\lambda }{\lambda -1}") .
.
Nech bod
je lineárnou kombináciou bodov , ktorá má tvar . Potom pre deliaci pomer platí:
(DP1)
.
Dôkaz.
 ,
,
z čoho už priamo plynie výsledok.
Platí aj tvrdenie v opačnom smere. Nech pre deliaci pomer platí: =\lambda") . Potom platí:
. Potom platí:
A + \lambda B,\; \lambda \neq 1") .
.
Vieme, že. Po vydelení číslom  dostaneme
dostaneme
 = \large \frac{\lambda}{ \lambda -1}\small (C - B)") .
.
Pozrite si grafické zdôvodnenie Tu.
Z predchádzajúcich vzťahov vyplýva, že . Po roznásobení dostaneme
,
z čoho už priamo plynie výsledok.
Platí aj tvrdenie v opačnom smere. Nech pre deliaci pomer platí:
. Potom platí:
.
Vieme, že
. Po vydelení číslom dostaneme
.
Pozrite si grafické zdôvodnenie Tu.
Poznámky.
- Z definície deliaceho pomeru vyplýva, že vektory
, \vec v = (C-B)") sú lineárne závislé a
platí
sú lineárne závislé a
platí  . Preto kvôli korektnosti definície deliaceho pomeru je v definícii uvádzaná podmienka kolineárnosti bodov
. Preto kvôli korektnosti definície deliaceho pomeru je v definícii uvádzaná podmienka kolineárnosti bodov  . Z predchádzajúceho tvrdenia aj z cvičenia 3. tiež vyplýva, že body
sú kolineárne.
. Z predchádzajúceho tvrdenia aj z cvičenia 3. tiež vyplýva, že body
sú kolineárne. - Z cvičenia 1. vyplýva, že existuje bod
 , ktorý budeme nazývať stred dvojice bodov
(resp. úsečky
, ktorý budeme nazývať stred dvojice bodov
(resp. úsečky  ). Ak
). Ak  , tak pre stred
, tak pre stred  platí
platí =-1") .
Stred dvojice bodov budeme označovat’
.
Stred dvojice bodov budeme označovat’  .
.
Tvrdenie.
a) Nech body , potom vektory
, potom vektory  (sa rovnajú) práve vtedy, keď
(sa rovnajú) práve vtedy, keď  (stred rovnobežníka).
(stred rovnobežníka).
b) Pre súradnice stredu platí: ") .
.
Výberové témy
a) Nech body
, potom vektory (sa rovnajú) práve vtedy, keď (stred rovnobežníka).
b) Pre súradnice stredu
platí: .
Tvrdenie (Menelaos).
Nech sú nekolineárne body a nech  sú body rôzne od bodov . Potom
body
sú body rôzne od bodov . Potom
body  sú kolineárne práve vtedy, keď
sú kolineárne práve vtedy, keď (BCA′)(CAB′) = 1") .
.
Nech
sú nekolineárne body a nech sú body rôzne od bodov . Potom
body sú kolineárne práve vtedy, keď .
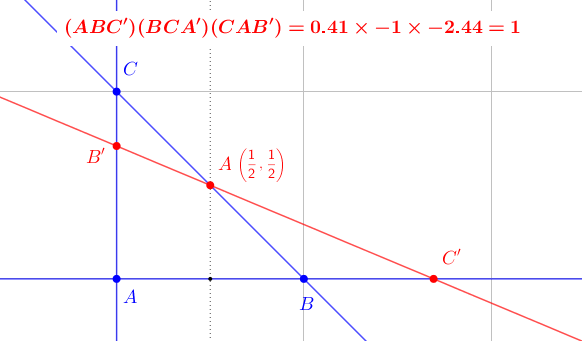
Dôkaz.
Zvoľme afinnú sústavu súradníc tak, že, B = (1,0), C = (0,1)") . Body
. Body  majú po rade súradnice
majú po rade súradnice , (0,b)") ,
pričom
,
pričom  . Rovnica nadroviny (priamky)
. Rovnica nadroviny (priamky)  má všeobecnú rovnicu
má všeobecnú rovnicu  . Preto
. Preto , a ≠ 0, 1") .
Z definície deliaceho pomeru dostaneme
.
Z definície deliaceho pomeru dostaneme
 = c/(c −1), (BCA′) = (a −1)/a, (CAB′) = (b −1)/b") .
.
Po jednoduchých úpravách ľahko zistíme, že rovnosť je ekvivalentná s rovnosťou  .
.
Na druhej strane body sú kolineárne práve vtedy, keď ležia na jednej priamke. Priamka určená bodmi má parametrické vyjadrenie
") .
.
Bod leží na tejto priamke práve vtedy, keď platí
leží na tejto priamke práve vtedy, keď platí ") . Po dosadení súradníc dostaneme sústavu dvoch rovníc o jednej neznámej ,
ktorá má riešenie práve vtedy, keď platí .
. Po dosadení súradníc dostaneme sústavu dvoch rovníc o jednej neznámej ,
ktorá má riešenie práve vtedy, keď platí .
Zvoľme afinnú sústavu súradníc tak, že
. Body majú po rade súradnice ,
pričom . Rovnica nadroviny (priamky) má všeobecnú rovnicu . Preto .
Z definície deliaceho pomeru dostaneme
.
Po jednoduchých úpravách ľahko zistíme, že rovnosť
je ekvivalentná s rovnosťou .
Na druhej strane body
sú kolineárne práve vtedy, keď ležia na jednej priamke. Priamka určená bodmi má parametrické vyjadrenie
.
Bod
leží na tejto priamke práve vtedy, keď platí . Po dosadení súradníc dostaneme sústavu dvoch rovníc o jednej neznámej ,
ktorá má riešenie práve vtedy, keď platí .
Tvrdenie (Ceva, čítaj čéva).
Nech body sú nekolineárne a nech body ležia na stranách odpovedajúcim protiľahlým vrcholom trojuholníka , potom
priamky  sa pretínajú v jednom bode práve vtedy, ak platí
sa pretínajú v jednom bode práve vtedy, ak platí (BCA′)(CAB′) = −1") .
.
Nech body
sú nekolineárne a nech body ležia na stranách odpovedajúcim protiľahlým vrcholom trojuholníka , potom
priamky sa pretínajú v jednom bode práve vtedy, ak platí .
Dôkaz nájdete v práci [TIS] na stránke
Tu, str. 91; konštrukčný dôkaz je dostupný v kurze Planimetria v kapitole
Vybrané vety o trojuholníkoch.
\)
Afinné zobrazenie
V ďalších kapitolách sa budeme zaoberať len euklidovským priestorom so zameraním . Zameriame sa prevažne len na dvojrozmerný a trojrozmerný euklidovský priestor - rovinu  a priestor
a priestor  . Pripomíname, že v euklidovskom priestore je definovaný skalárny súčin.
. Pripomíname, že v euklidovskom priestore je definovaný skalárny súčin.
Táto kapitola sa venuje definícii, vlastnostiam a analytickému opisu afinných zobrazení medzi doma euklidovskými priestormi. Podávame výklad v súlade s moderným prístupom: kombinácia syntetickej a analytickej geometrie. Zameriame sa aj na prepojenie s barycentrickým vyjadrením a vlastnosťami lineárneho zobrazenia. Príklady zahŕňajú výpočty s transformačnými maticami a konkrétne aplikácie.
so zameraním . Zameriame sa prevažne len na dvojrozmerný a trojrozmerný euklidovský priestor - rovinu a priestor . Pripomíname, že v euklidovskom priestore je definovaný skalárny súčin.
Táto kapitola sa venuje definícii, vlastnostiam a analytickému opisu afinných zobrazení medzi doma euklidovskými priestormi. Podávame výklad v súlade s moderným prístupom: kombinácia syntetickej a analytickej geometrie. Zameriame sa aj na prepojenie s barycentrickým vyjadrením a vlastnosťami lineárneho zobrazenia. Príklady zahŕňajú výpočty s transformačnými maticami a konkrétne aplikácie.
Definícia (Afinné zobrazenie).
Nech sú euklidovské podpriestory priestoru . Zobrazenie
sú euklidovské podpriestory priestoru . Zobrazenie

sa nazýva afinné zobrazenie (AZ), ak obrazom ľubovoľných troch kolineárnych bodov sú buď totožné body, alebo kolineárne body, pričom ich deliaci pomer sa zachováva.
Nech
sú euklidovské podpriestory priestoru . Zobrazenie
sa nazýva afinné zobrazenie (AZ), ak obrazom ľubovoľných troch kolineárnych bodov sú buď totožné body, alebo kolineárne body, pričom ich deliaci pomer sa zachováva.
Z definície vyplýva, že afinné zobrazenie má vlastnosť lineárneho zobrazenia. Afinné zobrazenie je také, ktoré zachováva afinné kombinácie bodov.
Vo všeobecnosti platí nasledujúca veta "Maticové vyjadrenie AZ". Pozrite si tiež vetu "Obraz bodu v afinnom zobrazení" v kapitole Analytické vyjadrenie.
Vo všeobecnosti platí nasledujúca veta "Maticové vyjadrenie AZ". Pozrite si tiež vetu "Obraz bodu v afinnom zobrazení" v kapitole Analytické vyjadrenie.
Veta (Maticové vyjadrenie AZ).
Afinné zobrazenie medzi euklidovskými podpriestormi priestoru možno vyjadriť ako
medzi euklidovskými podpriestormi priestoru možno vyjadriť ako
 =\small \mathbb{A} \small X + \normalsize b") ,
,
ktoré bodu priradí bod ") , kde
, kde  je lineárna matica (zobrazenie medzi vektorovými podpriestormi
je lineárna matica (zobrazenie medzi vektorovými podpriestormi ") a
a ") ); a
); a  je pevný vektor (posunutie), ktorý je určený obrazom počiatku repéru v zobrazení .
je pevný vektor (posunutie), ktorý je určený obrazom počiatku repéru v zobrazení .
Afinné zobrazenie
medzi euklidovskými podpriestormi priestoru možno vyjadriť ako
,
ktoré bodu
priradí bod , kde je lineárna matica (zobrazenie medzi vektorovými podpriestormi
a ); a je pevný vektor (posunutie), ktorý je určený obrazom počiatku repéru v zobrazení .
Dôkaz .
Uvedieme len hlavné myšlienky dôkazu.
Uvedieme len hlavné myšlienky dôkazu.
-
Zrejme afinné zobrazenie zachováva afinné kombinácie, teda musí plaitť
Y= \lambda f(X)+(1-\lambda )Y")
pre ľubovoľné body euklidovského priestoru . - Uvažujme o asociovanom zobrazení
 medzi vektorovými priestormi
medzi vektorovými priestormi , V_s(\mathbb R)") (zamerania afinných podpriestorov ). Potom pre bod
(zamerania afinných podpriestorov ). Potom pre bod  a zobrazenie bude platiť (načrtnite si obrázok)
a zobrazenie bude platiť (načrtnite si obrázok)
=f(O+\vec x)-f(O)") .
.
- Po dosadení a vhodných úpravách dostaneme
=f(O+\vec x)=f^*(\vec x)+f(O)") ,
,
čo v súradniciach predstavuje
.
Vo všeobecnosti môžeme konštatovať, že afinné zobrazenie zachováva nasledovné vlastnosti:
- Lineárnosť.
Afinné zobrazenie zachováva lineárne kombinácia bodov.
Ak platí
zachováva lineárne kombinácia bodov.
Ak platí
 ,
,
tak musí platiť aj
 ,
,
kde=P', \normalsize f(\small P_i)=P'_i, \normalsize α_1+ . . . + α_k = 1") .
.
- Kolineárnosť .
Afinné zobrazenie zachováva kolineárnosť bodov. Teda ak tri body sú kolineárne pred zobrazením, zostanú kolineárne aj po zobrazení. - Deliaci pomer.
Afinné zobrazenie zachováva pomery medzi bodmi na priamke, ale nemusí zachovať vzdialenosti bodov alebo veľkosti uhlov. Teda platí:
 =\mu (\small A'B'C')") .
.
Príklad (Transformačná matica).
Afinné zobrazenie je dané maticou
je dané maticou
") a vektorom posunutia
a vektorom posunutia
") .
.
Určte súradnice obrazu bodu![\small X=[3, -1]](https://lms.umb.sk/filter/tex/pix.php/82c2685a036000613de9d90bf071295b.png "\small X=[3, -1]") . Ktorý bod sa zobrazia do bodu [9, 8] ? Určte obraz vektora
. Ktorý bod sa zobrazia do bodu [9, 8] ? Určte obraz vektora ") a tiež obrazy vektorov ortonormálnej bázy. Využite dynamický (applet) model tohto afinného zobrazenia.
a tiež obrazy vektorov ortonormálnej bázy. Využite dynamický (applet) model tohto afinného zobrazenia.
Afinné zobrazenie
je dané maticou
a vektorom posunutia
.
Určte súradnice obrazu bodu
. Ktorý bod sa zobrazia do bodu [9, 8] ? Určte obraz vektora a tiež obrazy vektorov ortonormálnej bázy. Využite dynamický (applet) model tohto afinného zobrazenia.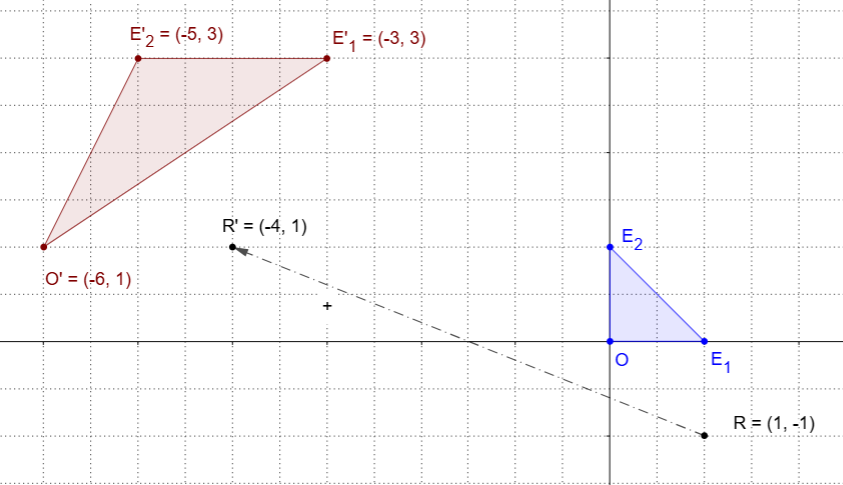
Afinné zobrazenie - transformačná matica+vektor posunutia.
Pozorujte zmeny v Transformačných rovniciach pri zmene polohy bodov
 .
.
Riešenie.
Maticové vyjadrenie tohto afinného zobrazenia bude mať tvar
=
\left(\begin{matrix}
3 & 1 \\
1 & 1
\end{matrix}\right) \times
\left(\begin{matrix}
x \\
y
\end{matrix}\right)+
\left(\begin{matrix}
-6 \\1
\end{matrix}\right)") ,
,
čo je ekvivalentné zápisu ("transformačným rovniciam")
 .
.
Teraz súradnice bodu [3, -1] dosadíme do maticového vyjadrenia (AZ) alebo použijeme transformačné rovnice a dostaneme, že bod sa zobrazí
do bodu ![\small X'=[3, 3]](https://lms.umb.sk/filter/tex/pix.php/34e2b1adda857d33d67ca56c24f2791c.png "\small X'=[3, 3]") .
.
Hľadajme, ktorý bod sa zobrazí do bodu [9 , 8]. Súradnice tohto obrazu dosadíme do transformačných rovníc za premenné . Riešením je
dvojica
. Riešením je
dvojica  .
.
Obraz vektora") určíme dvoma spôsobmi:
určíme dvoma spôsobmi:
") . Nájdenie súradníc vektorov bázy prenecchávame na čitateľa.
. Nájdenie súradníc vektorov bázy prenecchávame na čitateľa.
Maticové vyjadrenie tohto afinného zobrazenia bude mať tvar
,
čo je ekvivalentné zápisu ("transformačným rovniciam")
.
Teraz súradnice bodu [3, -1] dosadíme do maticového vyjadrenia (AZ) alebo použijeme transformačné rovnice a dostaneme, že bod
sa zobrazí
do bodu .
Hľadajme, ktorý bod sa zobrazí do bodu [9 , 8]. Súradnice tohto obrazu dosadíme do transformačných rovníc za premenné
. Riešením je
dvojica .
Obraz vektora
určíme dvoma spôsobmi:
- Pomocou obrazov jeho počiatku
![\small O=[0,0]](https://lms.umb.sk/filter/tex/pix.php/e207eadb01df7727b1ae1c147893e113.png "\small O=[0,0]") a jeho koncového bodu
a jeho koncového bodu ![\small V=[2,3]](https://lms.umb.sk/filter/tex/pix.php/8c9dc0cd8650ea995499f308e7da52f8.png "\small V=[2,3]") . Počiatok sa zorazí do bodu
. Počiatok sa zorazí do bodu ![\small O'=[-6,1]](https://lms.umb.sk/filter/tex/pix.php/2e9f346bec496d3fe7d86cd4f32bac14.png "\small O'=[-6,1]") a koncový bod
do bodu
a koncový bod
do bodu ![\small V'=[3,6]](https://lms.umb.sk/filter/tex/pix.php/30199a2eca368fd63f3cd972c57b4d88.png "\small V'=[3,6]") . Potom vektor
. Potom vektor ![\vec v'=\small ([3,6]-[-6,1]=[9,5]](https://lms.umb.sk/filter/tex/pix.php/d22e8beeaa21f83219296dca528b9a7b.png "\vec v'=\small ([3,6]-[-6,1]=[9,5]")
- Pomocou lineárnej matice ako súčin
 \times
\left(\begin{matrix}
2 \\
3
\end{matrix}\right)")
. Nájdenie súradníc vektorov bázy prenecchávame na čitateľa.
Cvičenie.
Určte obrazy súradného simplexu v afinnom zobrazení z predchádzajúceho príkladu "Transformačná matica". Pokúste sa to zovšeobecniť na simplex
v afinnom zobrazení z predchádzajúceho príkladu "Transformačná matica". Pokúste sa to zovšeobecniť na simplex  .
.
Určte obrazy súradného simplexu
v afinnom zobrazení z predchádzajúceho príkladu "Transformačná matica". Pokúste sa to zovšeobecniť na simplex .
Pomoc
- Najskôr určte súradnice obrazu počiatku
![\small O=[0,0,...,0]](https://lms.umb.sk/filter/tex/pix.php/1c70342ad1b1fae73f74d14997eac233.png "\small O=[0,0,...,0]") dosadením do vektorovej rovnice
dosadením do vektorovej rovnice
a ukážte, že![\small O'=[b_1,b_2,...,b_n]](https://lms.umb.sk/filter/tex/pix.php/2a6081a6837e7a243790d2fc7de46b17.png "\small O'=[b_1,b_2,...,b_n]") resp.
resp.  .
.
- Potom určte súradnice obrazu bodu
![\small E_1=[1,0,...,0]](https://lms.umb.sk/filter/tex/pix.php/13badf53c74c52df13187e4ef3884b93.png "\small E_1=[1,0,...,0]") , pričom využijete vlastnosť, že
, pričom využijete vlastnosť, že
 .
.
Potom ukážte, že súradnice vektora sú zhodné so prvkami prvého stĺpca matice
sú zhodné so prvkami prvého stĺpca matice  .
.
Poznámky.
- Afinné zobrazenie môže, ale nemusí, zachovávať vzdialenosti bodov a veľkosti uhlov. Ak ich zachováva, tak sa nazýva "izometria".
- V prípade izometrie transformačná matica
 je ortogonálna, pre ktorú platí:
je ortogonálna, pre ktorú platí:
 ,
,
kde je jednotková matica. V práci [PTA, 2016] nájdete dôkaz tvrdenia pre euklidovský priestor .
je jednotková matica. V práci [PTA, 2016] nájdete dôkaz tvrdenia pre euklidovský priestor . - Ak
 , tak afinnému zobrazeniu hovoríme transformácia euklidovského priestoru .
, tak afinnému zobrazeniu hovoríme transformácia euklidovského priestoru .
\)
Tri body - príklad
♥ Príklad - Tri body.
Afinné zobrazenie zobrazuje body ![\small A[2, 1], B[3, 0], C[1, 4]](https://lms.umb.sk/filter/tex/pix.php/3f4645363521a7c7ddf8f031272960e8.png "\small A[2, 1], B[3, 0], C[1, 4]") do bodov
do bodov ![\small A'[1, 6], B'[1, 9], C'[3, 1]](https://lms.umb.sk/filter/tex/pix.php/95a78b0e2732eb2134ca3344d270d527.png "\small A'[1, 6], B'[1, 9], C'[3, 1]") v tomto poradí. Kam sa zobrazí bod
v tomto poradí. Kam sa zobrazí bod ![\small P[5, 7]](https://lms.umb.sk/filter/tex/pix.php/12b32440cc18cd0bfb55063d1f30e434.png "\small P[5, 7]") resp. bod
resp. bod ![\small X[x, y]](https://lms.umb.sk/filter/tex/pix.php/efa1e94429b3777f84985fcc9f922d4c.png "\small X[x, y]") ? Prevzaté z práce [CHP, 2010], Cvičenie 28.
? Prevzaté z práce [CHP, 2010], Cvičenie 28.
Afinné zobrazenie
zobrazuje body do bodov v tomto poradí. Kam sa zobrazí bod resp. bod ? Prevzaté z práce [CHP, 2010], Cvičenie 28.
Riešenie.
Riešenie úlohy je založené na vyjadrení jedného bodu ako afinnej kombinácie ostatných. Táto kombinácia je určená trojicou reálnych čísel (tzv. barycentrických súradníc), ktoré následne použijeme aj pre určenie obrazu zobrazovaného bodu. Tento postup využíva fakt, že afinné zobrazenie zachováva afinné kombinácie.
Bod vyjadrime ako lineárnu kombináciu bodov . V takom prípade musia existovať reálne čísla 
(1)
 .
.
Zobrazenie je lineárne, preto pre obraz ![\small P'[x',y']](https://lms.umb.sk/filter/tex/pix.php/c4981cddaf1f66c7b9b1f9ef84c5f482.png "\small P'[x',y']") bodu bude platiť
bodu bude platiť
(2)=a \cdot A'+b \cdot B'+c \cdot C'") , pričom tiež musí platiť
, pričom tiež musí platiť
Sústavu rovníc (1) a (2) vyjadríme v maticovom tvare a vyriešime.=\left(\begin{array}{ccc} 2&3&1 \\ 1&0&4\\ 1&1&1 \end{array}\right)\times \left(\begin{array}{ccc}a \\ b\\ c \end{array}\right)") matica vzorov
matica vzorov  matica neznámych
matica neznámych
=\left(\begin{array}{ccc} 1&1&3 \\ 6&9&1\\ 1&1&1 \end{array}\right)\times \left(\begin{array}{ccc}a \\ b\\ c \end{array}\right)") matica obrazov
matica obrazov matica neznámych
matica neznámych
Po vyjadrení
 \times
\left(\begin{matrix}5 \\7 \\1\end{matrix}\right)=\left(\begin{matrix}-11 \\\frac{15}{2} \\\frac{9}{2}\end{matrix}\right)")
a po dosadení do (2) dostaneme riešenie
=
\left(\begin{matrix}
1 & 1 & 3 \\
6 & 9 & 1 \\
1 & 1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
-2 & -1 & 6 \\
\frac{3}{2} & \frac{1}{2} & \frac{-7}{2} \\
\frac{1}{2} & \frac{1}{2} & \frac{-3}{2}
\end{matrix}\right)
\times
\left(\begin{matrix}
5 \\
7 \\
1
\end{matrix}\right)") .
.
matica obrazov inverzná matica vzorov matica súradníc zobrazovaného bodu
Po roznásobení
= \left(\begin{matrix}
1 & 1 & -2 \\
2 & -1 & 3 \\
0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
5 \\
7 \\
1
\end{matrix}\right)=
\left(\begin{matrix}10 \\6 \\1\end{matrix}\right)") .
.
Porovnaním ľavej a pravej strany dostaneme riešenie![\small P'=[10,6]](https://lms.umb.sk/filter/tex/pix.php/f4056527435d985bc1a407c62a354369.png "\small P'=[10,6]") .
.
Ak pre bod zvolíme všeobecné súradnice ![\small P=[x,y]](https://lms.umb.sk/filter/tex/pix.php/cb5958c2025b20cde42da0c659bb6c06.png "\small P=[x,y]") , tak riešenie môžeme zapísať v tvare
, tak riešenie môžeme zapísať v tvare
 =
\left(\begin{matrix}
1 & 1 & -2 \\
2 & -1 & 3 \\
0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
x \\
y \\
1
\end{matrix}\right)
=
\left(\begin{matrix}
x+y-2 \\
2x-y+3 \\
1
\end{matrix}\right).")
Riešenie úlohy je založené na vyjadrení jedného bodu ako afinnej kombinácie ostatných. Táto kombinácia je určená trojicou reálnych čísel (tzv. barycentrických súradníc), ktoré následne použijeme aj pre určenie obrazu zobrazovaného bodu. Tento postup využíva fakt, že afinné zobrazenie zachováva afinné kombinácie.
Bod
vyjadrime ako lineárnu kombináciu bodov . V takom prípade musia existovať reálne čísla
(1)
.
Zobrazenie
je lineárne, preto pre obraz bodu bude platiť
(2)
, pričom tiež musí platiť
Sústavu rovníc (1) a (2) vyjadríme v maticovom tvare a vyriešime.
Pri riešení použijeme kalkulátor
"Matrix calculator", ktorý je dostupný
Tu.
matica vzorov matica neznámych
matica obrazov matica neznámych
Po vyjadrení
a po dosadení do (2) dostaneme riešenie
.
matica obrazov
inverzná matica vzorov matica súradníc zobrazovaného boduPo roznásobení
.
Porovnaním ľavej a pravej strany dostaneme riešenie
.
Ak pre bod
zvolíme všeobecné súradnice , tak riešenie môžeme zapísať v tvare
Transformačné rovnice afinného zobrazenia.
Porovnaním riadkov matíc dostaneme sústavu, ktorú budeme nazývať "transformačné rovnice zobrazenia". V našom príklade to budú rovnice

Dosaďte súradnice![\small P[5, 7]](https://lms.umb.sk/filter/tex/pix.php/c41015f970c9b7be85aba7a97ad4bc91.png "\small P[5, 7]") do tejto sústavy a zistíte súradnice hľadaného bodu
do tejto sústavy a zistíte súradnice hľadaného bodu ![\small P'[10, 6]](https://lms.umb.sk/filter/tex/pix.php/90ab42afff53c904fa7219eec0f1751b.png "\small P'[10, 6]") .
.
Porovnaním riadkov matíc dostaneme sústavu, ktorú budeme nazývať "transformačné rovnice zobrazenia". V našom príklade to budú rovnice
Dosaďte súradnice
do tejto sústavy a zistíte súradnice hľadaného bodu .
Iný spôsob riešenia príkladu "Tri body".
Po dosadení súradníc do vťahu (1) dostaneme![\small [5, 7]=a \cdot [2, 1]+b \cdot [3, 0]+c \cdot [1, 4]](https://lms.umb.sk/filter/tex/pix.php/cd188dc3a3f62ee19f485172daac0c7c.png "\small [5, 7]=a \cdot [2, 1]+b \cdot [3, 0]+c \cdot [1, 4]") , čo po roznásobení predstavuje sústavu troch rovníc
o troch neznámych
, čo po roznásobení predstavuje sústavu troch rovníc
o troch neznámych
 .
.
Riešením tejto sústavy je trojica čísel .
.
V afinnom zobrazení sa kolineárnosť zachováva, preto platí . Po dosadení riešenia a súradníc bodov
. Po dosadení riešenia a súradníc bodov
![\small A'[1, 6], 'B[1, 9], C'[3, 1]](https://lms.umb.sk/filter/tex/pix.php/eaaa2b6f3ad10f9287f3a91a1563eba9.png "\small A'[1, 6], 'B[1, 9], C'[3, 1]") do vzťahu (2) dostaneme
do vzťahu (2) dostaneme
}=1 \cdot (-11) + 1 \cdot \frac{15}{2}+3 \cdot \frac{9}{2}=-11+21=10\\ \small {y(P')}=6 \cdot (-11) + 9 \cdot \frac{15}{2}+1 \cdot \frac{9}{2}=6.")
Po dosadení súradníc do vťahu (1) dostaneme
, čo po roznásobení predstavuje sústavu troch rovníc
o troch neznámych
.Riešením tejto sústavy je trojica čísel
.
V afinnom zobrazení sa kolineárnosť zachováva, preto platí
. Po dosadení riešenia a súradníc bodov
do vzťahu (2) dostaneme
Pozrite si riešenie v GeoGebre
Tu.
Kompletné grafické riešenie pre afinné zobrazenie určené obrazmi troch bodov otvorte si
Tu.
Príklad - Ťažisko trojuholníka.
Zobrazenie roviny do tej istej roviny, ktoré bodu
roviny do tej istej roviny, ktoré bodu  priradí bod
priradí bod =\frac{1}{3}A+ \frac{1}{3}B +\frac{1}{3}X") je afinné zobrazenie. Zobrazenie, ktoré trojuholníku s jedným premenným vrcholom
priradí jeho ťažisko je afinné zobrazenie. Pozrite si dôkaz, že takéto zobrazenie je afinné
Tu.
je afinné zobrazenie. Zobrazenie, ktoré trojuholníku s jedným premenným vrcholom
priradí jeho ťažisko je afinné zobrazenie. Pozrite si dôkaz, že takéto zobrazenie je afinné
Tu.
Zobrazenie
roviny do tej istej roviny, ktoré bodu
priradí bod je afinné zobrazenie. Zobrazenie, ktoré trojuholníku s jedným premenným vrcholom
priradí jeho ťažisko je afinné zobrazenie. Pozrite si dôkaz, že takéto zobrazenie je afinné
Tu.
\)
Rôzne dimenzie
V predchádzajúcej kapitole sme riešili úlohy transformácie euklidovských priestorov  , keď
, keď  . V tejto kapitole sa budeme zaoberať prípadom
. V tejto kapitole sa budeme zaoberať prípadom  .
.
, keď . V tejto kapitole sa budeme zaoberať prípadom .
Príklad zobrazenie  .
.
Určte parameter tak, aby zobrazenie ktoré zobrazuje body
tak, aby zobrazenie ktoré zobrazuje body ![\small A[1, 0], B[0, 1],C[2, p]](https://lms.umb.sk/filter/tex/pix.php/f49c0b3f0bf1453ab07e57c5c4d6e0d0.png "\small A[1, 0], B[0, 1],C[2, p]") do bodov
do bodov ![\small A'[2,1,-1], B'[3,2,0], C'[1,0,2]](https://lms.umb.sk/filter/tex/pix.php/1fc10b7b65fbaf2986dee4ec72a5bc02.png "\small A'[2,1,-1], B'[3,2,0], C'[1,0,2]") v tomto poradí bolo afinné. Pre vhodné
v tomto poradí bolo afinné. Pre vhodné
.
Určte parameter
tak, aby zobrazenie ktoré zobrazuje body do bodov v tomto poradí bolo afinné. Pre vhodné
- určte obraz
") ľubovoľného bodu
ľubovoľného bodu ![\small P[x, y]](https://lms.umb.sk/filter/tex/pix.php/7e18944b1e340466fd42d0882b61be14.png "\small P[x, y]") ,
, - pomocou stopy bodu na kružnici popíšte a zostrojte obraz kružnice určenej bodmi
![\small A[1, 0], B[0, 1],C[2, 3]](https://lms.umb.sk/filter/tex/pix.php/d68e7110804078192907e062e23a2c9c.png "\small A[1, 0], B[0, 1],C[2, 3]") ,
, - takéto afinné zobrazenie geometricky interpretujte v GeoGebre.
Analýza úlohy
V tejto úlohe prechádzame z roviny do priestoru, tzn. pracujeme so zobrazením z . Preto je potrebné zobraziť dva body s dvoma súradnicami do bodov s troma súradnicami. Aj keď sa dimenzie priestorov líšia, postup riešenia ostáva podobný ako v predchádzajúcej kapitole: pracujeme s afinnou kombináciou a využívame transformačné matice ako predtým. Dôležité je, aby zobrazované body ležali v tej istej afinnej rovine ako obrazy.
. Preto je potrebné zobraziť dva body s dvoma súradnicami do bodov s troma súradnicami. Aj keď sa dimenzie priestorov líšia, postup riešenia ostáva podobný ako v predchádzajúcej kapitole: pracujeme s afinnou kombináciou a využívame transformačné matice ako predtým. Dôležité je, aby zobrazované body ležali v tej istej afinnej rovine ako obrazy.
Riešenie.
Body![\small P[x, y];P'[x', y',z']](https://lms.umb.sk/filter/tex/pix.php/39110208511e2bbc12267aec45050a66.png "\small P[x, y];P'[x', y',z']") vyjadrime ako lineárne kombinácie
vyjadrime ako lineárne kombinácie
,
kde.Zápis v maticovom tvare V predchádzajúcej kapitole sme ukázali, že
 ,
,
kde je matica vzorov,  matica obrazov
matica obrazov
") ,
,
") .
.
Pomocou maticovej kalkulačky určíme inverznú maticu.
Roznásobením
=
\left(\begin{matrix}
2 & 3 & 1 \\
1 & 2 & 0 \\
-1 & 0 & 2 \\
1 & 1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
\frac{p-1}{p+1} & \frac{-2}{p+1} & \frac{2}{p+1} \\
\frac{-p}{p+1} & \frac{1}{p+1} & \frac{p}{p+1} \\
\frac{1}{p+1} & \frac{1}{p+1} & \frac{-1}{p+1}
\end{matrix}\right)
\times
\left(\begin{matrix}
x \\
y \\
1
\end{matrix}\right)
=
\left(\begin{matrix}
-1 & 0 & 3 \\
-1 & 0 & 2 \\
\frac{-p+3}{p+1} & \frac{4}{p+1} & \frac{-4}{p+1} \\
0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
x \\
y \\
1
\end{matrix}\right)
=
\left(\begin{matrix}
-x+3 \\
-x+2 \\
\frac{-\left(px\right)+3x+4y-4}{p+1} \\
1
\end{matrix}\right)") .
.
a porovaním ľavej a pravej strany dostaneme transformačné rovnice

V tejto úlohe prechádzame z roviny do priestoru, tzn. pracujeme so zobrazením z
. Preto je potrebné zobraziť dva body s dvoma súradnicami do bodov s troma súradnicami. Aj keď sa dimenzie priestorov líšia, postup riešenia ostáva podobný ako v predchádzajúcej kapitole: pracujeme s afinnou kombináciou a využívame transformačné matice ako predtým. Dôležité je, aby zobrazované body ležali v tej istej afinnej rovine ako obrazy.
Riešenie.
Body
vyjadrime ako lineárne kombinácie
,
kde
.Zápis v maticovom tvare V predchádzajúcej kapitole sme ukázali, že
,
kde
je matica vzorov, matica obrazov
,
.
Pomocou maticovej kalkulačky určíme inverznú maticu.
Roznásobením
.
a porovaním ľavej a pravej strany dostaneme transformačné rovnice
Zobrazenie bude afinným práve vtedy, ak  . Súradnice obrazu ľubovoľného bodu určíme dosadením súradníc
. Súradnice obrazu ľubovoľného bodu určíme dosadením súradníc  do transformačných rovníc. Napríklad pre
do transformačných rovníc. Napríklad pre ![\small D[3,1]](https://lms.umb.sk/filter/tex/pix.php/d87ae2aa6878e674fae0498a5a39d4ee.png "\small D[3,1]") a
a  dostaneme
dostaneme ![\small D'[0,-1,0]](https://lms.umb.sk/filter/tex/pix.php/ce1572c3ffb0d63e754073ce9d707f14.png "\small D'[0,-1,0]") .
.
Kružnica určená bodmi má stred v bode ![\small S \left [\frac{1}{2}, \frac{1}{2} \right ]](https://lms.umb.sk/filter/tex/pix.php/1f862ef6072de16856c6272e4ef49ff7.png "\small S \left [\frac{1}{2}, \frac{1}{2} \right ]") a polomer
a polomer  a jej parametrické vyjadrenie má tvar (pozrite si prácu [VEL, 2012], časť "Kružnica, Veta 8"
Tu)
a jej parametrické vyjadrenie má tvar (pozrite si prácu [VEL, 2012], časť "Kružnica, Veta 8"
Tu)
![\small \left [\frac{3}{2}, \frac{3}{2} \right ] +\left [\frac{3 \sqrt{2} }{2}\cos t ,\frac{3 \sqrt{2} }{2}\sin t\right ]](https://lms.umb.sk/filter/tex/pix.php/540ac5353a475dc3c3788ff54a224437.png "\small \left [\frac{3}{2}, \frac{3}{2} \right ] +\left [\frac{3 \sqrt{2} }{2}\cos t ,\frac{3 \sqrt{2} }{2}\sin t\right ]") .
.
Po dosadení týchto parametrických súradníc do transformačných rovníc, zistíme, že obrazom je elipsa ležiaca v rovine . Jej parametrické vyjadrenie má tvar
. Jej parametrické vyjadrenie má tvar
![\small \left [\frac{3}{2}, \frac{1}{2}, \frac{3}{2} \right ] +\left [-\frac{1}{2}\cos t +\frac{3}{2}\sin t,-\frac{1}{2}\cos t +\frac{3}{2}\sin t, \frac{3}{2}\cos t +\frac{1}{2}\sin t\right ], t, 0, 2π](https://lms.umb.sk/filter/tex/pix.php/49c8dec70429e172c716a85f61c8fbd7.png "\small \left [\frac{3}{2}, \frac{1}{2}, \frac{3}{2} \right ] +\left [-\frac{1}{2}\cos t +\frac{3}{2}\sin t,-\frac{1}{2}\cos t +\frac{3}{2}\sin t, \frac{3}{2}\cos t +\frac{1}{2}\sin t\right ], t, 0, 2π") .
.
. Súradnice obrazu ľubovoľného bodu určíme dosadením súradníc do transformačných rovníc. Napríklad pre a dostaneme .
Kružnica určená bodmi
má stred v bode a polomer a jej parametrické vyjadrenie má tvar (pozrite si prácu [VEL, 2012], časť "Kružnica, Veta 8"
Tu).
Po dosadení týchto parametrických súradníc do transformačných rovníc, zistíme, že obrazom je elipsa ležiaca v rovine
. Jej parametrické vyjadrenie má tvar .
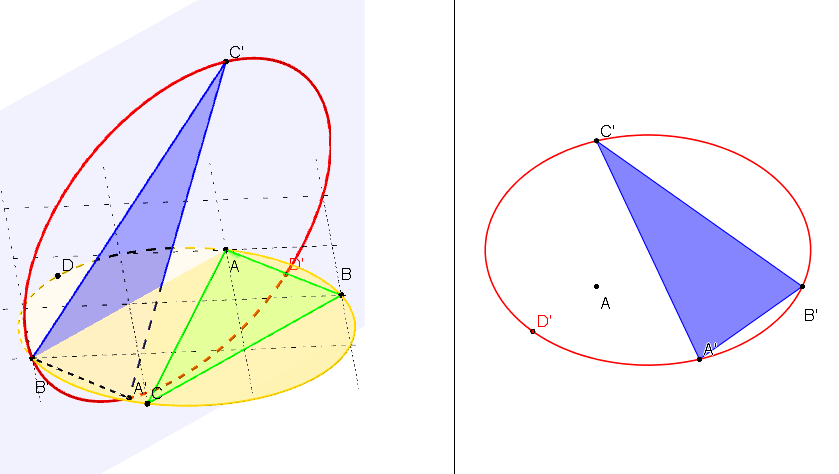
Príklad zobrazenie  .
.
Určte transformačné rovnice afinného zobrazenia, ktoré zobrazuje body![[2,1], [3,2],[0,1]](https://lms.umb.sk/filter/tex/pix.php/28fd534fed838f9e9fb5d23c36ee99c9.png "[2,1], [3,2],[0,1]") do bodov
do bodov ![[2], [0], [10]](https://lms.umb.sk/filter/tex/pix.php/3f02af62885a2f990cca75cf9f4dd6ad.png "[2], [0], [10]") v tomto poradí.
v tomto poradí.
Určte obraz ľubovoľného bodu a jeho stopu. Príklad je prevzatý zo zbierky [MOZ], 2.časť, Cvičenie 3.3.2a.
.
Určte transformačné rovnice afinného zobrazenia, ktoré zobrazuje body
do bodov v tomto poradí.
Určte obraz ľubovoľného bodu
a jeho stopu. Príklad je prevzatý zo zbierky [MOZ], 2.časť, Cvičenie 3.3.2a.
Riešenie.
Transformačné určíme pomocou maticovej kalkulačky. Musíme si uvedomiť, že bod-vzor má 2 súradnice a bod-obraz má 1 súradnicu. To znamená, že bod P ako vzor vyjadríme ako lineárnu kombináciu troch bodov. Teda musí byť
,
kde.
=
\left(\begin{matrix}
2 & 0 & 10 \\
1 & 1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
\frac{1}{2} & \frac{-3}{2} & \frac{3}{2} \\
0 & 1 & -1 \\
\frac{-1}{2} & \frac{1}{2} & \frac{1}{2}
\end{matrix}\right)
\times
\left(\begin{matrix}
x \\
y \\
1
\end{matrix}\right)=
\left(\begin{matrix}
-4 & 2 & 8 \\
0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
x \\
y \\
1
\end{matrix}\right)=
\left(\begin{matrix}-4x+2y+8 \\1\end{matrix}\right).")

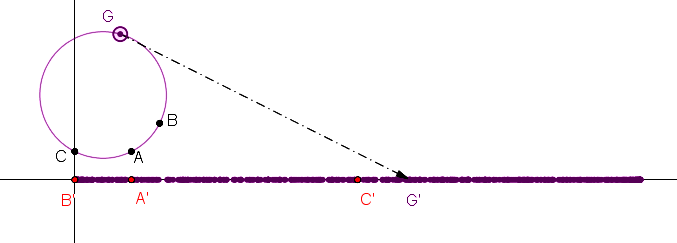
Transformačné určíme pomocou maticovej kalkulačky. Musíme si uvedomiť, že bod-vzor má 2 súradnice a bod-obraz má 1 súradnicu. To znamená, že bod P ako vzor vyjadríme ako lineárnu kombináciu troch bodov
. Teda musí byť
,
kde
.
Príklad zobrazenie  .
.
Určte transformačné rovnice afinného zobrazenia, ktoré zobrazuje body![[1,2,3], [1,1,1],[1,0,1],[0,1,3]](https://lms.umb.sk/filter/tex/pix.php/d8a837e320e9e2612eac54ce0fc479c3.png "[1,2,3], [1,1,1],[1,0,1],[0,1,3]") do bodov
do bodov ![[5,4], [2,1], [1,0], [3,2]](https://lms.umb.sk/filter/tex/pix.php/5da5cd5c780cbe37d8f10ecca2ada2c3.png "[5,4], [2,1], [1,0], [3,2]") v tomto poradí.
v tomto poradí.
.
Určte transformačné rovnice afinného zobrazenia, ktoré zobrazuje body
do bodov v tomto poradí.
- Pokúste sa toto afinné zobrazenie geometricky interpretovať pomocou GeoGebry. Príklad je prevzatý zo zbierky [MOZ], 2.časť, Cvičenie 3.3.7.
- Určte obraz nejakej kružnice a jej stredu.
Riešenie.
Transformačné určíme pomocou maticovej kalkulačky
=
\left(\begin{matrix}
5 & 2 & 1 & 3 \\
4 & 1 & 0 & 2 \\
1 & 1 & 1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
1 & 0 & \frac{1}{2} & \frac{-3}{2} \\
-1 & 1 & -1 & 2 \\
1 & -1 & \frac{1}{2} & \frac{-1}{2} \\
-1 & 0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
x \\
y \\
1
\end{matrix}\right)
=
\left(\begin{matrix}
1 & 1 & 1 & -1 \\
1 & 1 & 1 & -2 \\
0 & 0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
x \\
y \\
1
\end{matrix}\right) =
\left(\begin{matrix}x+y+z-1 \\x+y+z-2 \\1\end{matrix}\right).")
 .
.
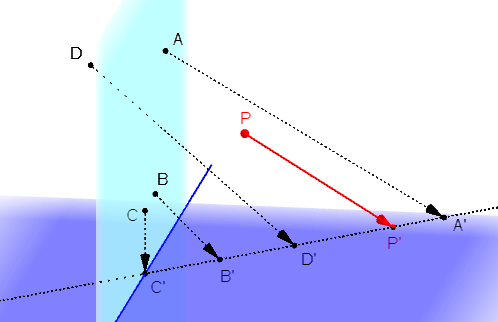
Transformačné určíme pomocou maticovej kalkulačky
.
V ďalších kapitolách ukážeme, že afinné zobrazenie  je jednoznačne určené
je jednoznačne určené
je jednoznačne určené
- obrazmi
 lineárne nezávislými bodmi euklidovského priestoru alebo
lineárne nezávislými bodmi euklidovského priestoru alebo - obrazmi repéru euklidovského priestoru .
\)
Všeobecne dimenzie
Úvod ku kapitole
V tejto časti rozširujeme predchádzajúci postup na všeobecný prípad zobrazenia n-rozmerného simplexu. Namiesto konkrétnych súradníc bodov používame všeobecné symboly a predpokladáme lineárnu nezávislosť bodov. Tento prístup umožní čitateľovi pochopiť jednotnú štruktúru riešenia vo všetkých dimenziách – od roviny až po priestor n-rozmerný. Vhodné je predstaviť si tieto body ako vrcholy trojuholníka, štvorstena či vyšších analogických útvarov.
V tejto časti rozširujeme predchádzajúci postup na všeobecný prípad zobrazenia n-rozmerného simplexu. Namiesto konkrétnych súradníc bodov používame všeobecné symboly a predpokladáme lineárnu nezávislosť bodov. Tento prístup umožní čitateľovi pochopiť jednotnú štruktúru riešenia vo všetkých dimenziách – od roviny až po priestor n-rozmerný. Vhodné je predstaviť si tieto body ako vrcholy trojuholníka, štvorstena či vyšších analogických útvarov.
Nech sú euklidovské podpriestory priestoru a zobrazenie
je afinné zobrazenie podpriestoru do podpriestoru
do podpriestoru  .
.
sú euklidovské podpriestory priestoru a zobrazenie
je afinné zobrazenie podpriestoru
do podpriestoru .
Zvoľme si ľubovoľný bod ![\small P[x_1,x_2, ..., x_r] \in \mathbb E_r](https://lms.umb.sk/filter/tex/pix.php/ffa7fd4de5f052326d55dedb9cb49253.png "\small P[x_1,x_2, ..., x_r] \in \mathbb E_r") , ktorý je lineárneárnou kombináciou bodov
, ktorý je lineárneárnou kombináciou bodov
![\small A_1[a_{11},...,a{1r}], A_2[a_{21},...,a_{2r}],...,A_r[a_{r1},...,a_{rr}], A_{r+1}[a_{{r+1},1},...,a_{{r+1},r}]](https://lms.umb.sk/filter/tex/pix.php/4deb8f21cd8c2936c53bbe10ed5205de.png "\small A_1[a_{11},...,a{1r}], A_2[a_{21},...,a_{2r}],...,A_r[a_{r1},...,a_{rr}], A_{r+1}[a_{{r+1},1},...,a_{{r+1},r}]") .
.
V takom prípade musia existovať reálne čísla
(1)
 .
.
Nech bod![\small P'[x'_1,x'_2, ..., x'_s]](https://lms.umb.sk/filter/tex/pix.php/c264bca843eec06c42149b13d24fbfd4.png "\small P'[x'_1,x'_2, ..., x'_s]") je obraz bodu
je obraz bodu ![\small P[x_1,x_2, ..., x_{r+1}]](https://lms.umb.sk/filter/tex/pix.php/ea1abf21adad0c8e560839d8ebf8b182.png "\small P[x_1,x_2, ..., x_{r+1}]") v zobrazení .
Zobrazenie je lineárne, preto pre obraz bude platiť
v zobrazení .
Zobrazenie je lineárne, preto pre obraz bude platiť
(2)=\alpha_1 \cdot A'_1+...+\alpha_{r+1} \cdot A'_{r+1}") ,
,
.
Keďže bod je bodom podpriestoru musí mať  súradníc ale je lineárnou kombináciou práve
súradníc ale je lineárnou kombináciou práve  . Potom sústavu rovníc (1) a (2) môžeme vyjadriť v maticovom tvare
. Potom sústavu rovníc (1) a (2) môžeme vyjadriť v maticovom tvare

\times
\left(\begin{array}{ccc}
\alpha_1 \\ \alpha_2\\
...
\\\alpha_r \\\alpha_{r+1} \end{array}\right)") .
.

\times
\left(\begin{array}{ccc}
\alpha_1 \\ \alpha_2\\
...
\\\alpha_r \\\alpha_{r+1} \end{array}\right)") .
.
Po vyjadrení z prvej maticovej rovnice a po dosadení do druhej dostaneme riešenie
z prvej maticovej rovnice a po dosadení do druhej dostaneme riešenie
.
\)
, ktorý je lineárneárnou kombináciou bodov
.
V takom prípade musia existovať reálne čísla
(1)
.
Nech bod
je obraz bodu v zobrazení .
Zobrazenie je lineárne, preto pre obraz bude platiť
(2)
,
.
Keďže bod
je bodom podpriestoru musí mať súradníc ale je lineárnou kombináciou práve . Potom sústavu rovníc (1) a (2) môžeme vyjadriť v maticovom tvare .
.
Po vyjadrení
z prvej maticovej rovnice a po dosadení do druhej dostaneme riešenie
.
Poznámka.
Výsledná matica má zrejme rozmer
má zrejme rozmer ") , teda bod má
, teda bod má  súradníc!
súradníc!
Výsledná matica
má zrejme rozmer , teda bod má súradníc!
\)
Jednoznačnosť AZ
Afinné zobrazenie determinuje ďalšie zobrazenie  medzi vektorovými zložkami príslušných euklidovských vektorových priestorov.
medzi vektorovými zložkami príslušných euklidovských vektorových priestorov.
determinuje ďalšie zobrazenie medzi vektorovými zložkami príslušných euklidovských vektorových priestorov.
Definícia (Asociované zobrazenie).
Nech je afinné zobrazenie. Zobrazenie nazývame asociovaným zobrazením k afinnému zobrazeniu ,
ak spĺňa nasledujúce podmienky:
je afinné zobrazenie. Zobrazenie nazývame asociovaným zobrazením k afinnému zobrazeniu ,
ak spĺňa nasledujúce podmienky:
Nech
je afinné zobrazenie. Zobrazenie nazývame asociovaným zobrazením k afinnému zobrazeniu ,
ak spĺňa nasledujúce podmienky:

 a
a  také,
že
také,
že =1") , platí
, platí
 = \sum_{i=0}^{k}{α_i f(A_i)}") .
.
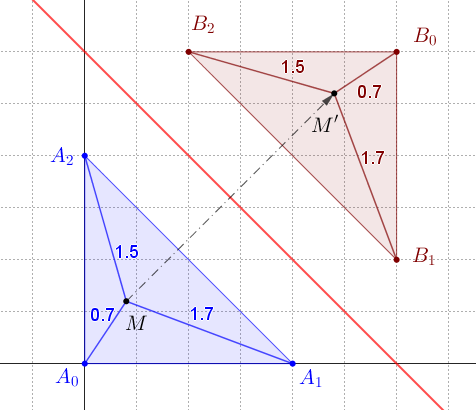
Predchádzajúca definícia vlastne hovorí, že asociované zobrazenie „zachováva” lineárne kombinácie bodov.
Veta (Korektnosť definície asociovaného zobrazenia).
Zobrazenie je jednoznačné určené a je dobre definované. Ekvivalentný matematický zápis: nech

pre nejaké . Potom existuje práve jedno asociované zobrazenie také, že
. Potom existuje práve jedno asociované zobrazenie také, že
 = f^∗(β_0B_0 + \cdot \cdot \cdot + β_kB_k)") .
.
Zobrazenie
je jednoznačné určené a je dobre definované. Ekvivalentný matematický zápis: nech
pre nejaké
. Potom existuje práve jedno asociované zobrazenie také, že
.
Dôkaz - korektnosť definície asociovaného zobrazenia.
Existencia a jednoznačnosť asociovaného zobrazenia je daná obrazmi vektorov Vn.
Čo sa týka dobrej definovanosti zápisu v definicii asociovaného zobrazenia, z predpokladu vety vyplýva, že pre nejaké
pre nejaké  . Teda
. Teda
 .
.
Keďže zobrazenie je afinné, a teda zachováva lineárne kombinácie bodov, tak
 = f(O) + α_0f(A_0) + · · · + α_kf(A_k) = M' + α_0B_0 + · · · + α_kB_k") . Prezrite si applet z definície
. Prezrite si applet z definície
Existencia a jednoznačnosť asociovaného zobrazenia je daná obrazmi vektorov Vn.
Čo sa týka dobrej definovanosti zápisu v definicii asociovaného zobrazenia, z predpokladu vety vyplýva, že
pre nejaké . Teda
.
Keďže zobrazenie
je afinné, a teda zachováva lineárne kombinácie bodov, tak
. Prezrite si applet z definície
Lineárne nezávislá množina bodov.
Nech je množina bodov euklidovského priestoru. Je celkom prirodzené zaviesť pojem lineárne nezávislých bodov,
ako množinu lineárne nezávislých vektorov
je množina bodov euklidovského priestoru. Je celkom prirodzené zaviesť pojem lineárne nezávislých bodov,
ako množinu lineárne nezávislých vektorov  .
.
Nech
je množina bodov euklidovského priestoru. Je celkom prirodzené zaviesť pojem lineárne nezávislých bodov,
ako množinu lineárne nezávislých vektorov .
Poznámka.
Z predchádzajúcej definície je zrejmé, že v euklidovskom rozmernom priestore existuje najviac  lineárne nezávislých bodov. Naviac tento počet sa dá dosiahnuť.
lineárne nezávislých bodov. Naviac tento počet sa dá dosiahnuť.
Z predchádzajúcej definície je zrejmé, že v euklidovskom
rozmernom priestore existuje najviac lineárne nezávislých bodov. Naviac tento počet sa dá dosiahnuť.
V kapitole "Lineárna kombinácia bodov" sme dokázali vetu
Ľubovoľný bod  sa dá jednoznačne vyjadriť v tvare
sa dá jednoznačne vyjadriť v tvare
,
kde.
sa dá jednoznačne vyjadriť v tvare
,
kde
.
Na základe tohto tvrdenia a definície nezávislých bodov, môžeme povedať, že ľubovoľný bod euklidovského priestoru  sa dá
jednoznačne vyjadriť ako ich lineárna kombinácia.
sa dá
jednoznačne vyjadriť ako ich lineárna kombinácia.
Poznámka o lineárnych zobrazeniach.
Z lineárnej algebry poznáme tvrdenie, že každé lineárne zobrazenie je jednoznačne dané obrazmi prvkov nejakej bázy
priestoru
je jednoznačne dané obrazmi prvkov nejakej bázy
priestoru  .
.
sa dá
jednoznačne vyjadriť ako ich lineárna kombinácia.
Poznámka o lineárnych zobrazeniach.
Z lineárnej algebry poznáme tvrdenie, že každé lineárne zobrazenie
je jednoznačne dané obrazmi prvkov nejakej bázy
priestoru .
Dôsledok obraz repéra.
Nech je repér priestoru a ľubovoľný bod
je repér priestoru a ľubovoľný bod  . Ďalej
nech
. Ďalej
nech  sú vektory vektorového priestoru
sú vektory vektorového priestoru  . Potom existuje jediné afinné
zobrazenie také, že
. Potom existuje jediné afinné
zobrazenie také, že
=B") a
a =\pmb {b_i}") pre
pre  .
.
Nech
je repér priestoru a ľubovoľný bod . Ďalej
nech sú vektory vektorového priestoru . Potom existuje jediné afinné
zobrazenie také, že
a pre .
Dôkaz nájdete v učebniciach z lineárnej algebry.
Veta (Jednoznačnosť afinného zobrazenia).
Nech je afinné zobrazenie. Potom je jednoznačne určené obrazmi  lineárne nezávislých bodov z .
lineárne nezávislých bodov z .
Nech
je afinné zobrazenie. Potom je jednoznačne určené obrazmi lineárne nezávislých bodov z .
Dôkaz.
Nech=B_0, . . . , f(A_n)=B_n") . V súlade s definíciou nezávislých bodov, vektory
. V súlade s definíciou nezávislých bodov, vektory

sú lineárne nezávislé. Keďže afinné zobrazenie je zároveň aj lineárne, tak pre obrazy vektorov v asociovanom afinnom zobrazení platí
v asociovanom afinnom zobrazení platí
= f^*(A_i-A_0)=f(A_i)-f(A_0)=B_i-B_0") pre
pre  .
.
Podľa dôsledku "obraz repéra" je takto jednoznačne definované afinné zobrazenie. Treba len overiť, či takto definované zobrazenia spĺňa podmienku, že=\pmb {b_i}") .
.
(Urobte to ako cvičenie!)
Nech
. V súlade s definíciou nezávislých bodov, vektory
sú lineárne nezávislé. Keďže afinné zobrazenie je zároveň aj lineárne, tak pre obrazy vektorov
v asociovanom afinnom zobrazení platí
pre .
Podľa dôsledku "obraz repéra" je takto jednoznačne definované afinné zobrazenie. Treba len overiť, či takto definované zobrazenia spĺňa podmienku, že
.
(Urobte to ako cvičenie!)
Príklad.
Dané sú body afinného priestoru![\small \mathcal{A}_4: A[2, 4, 5, 6]; B[−7, 4, 5, 6]; C[6, 11, 3, 7]; D[−3, −10, 9, 4]; E[−3, 11, 3, 7]](https://lms.umb.sk/filter/tex/pix.php/9b09fbccf9c7067f710d5ec3a4f09993.png "\small \mathcal{A}_4: A[2, 4, 5, 6]; B[−7, 4, 5, 6]; C[6, 11, 3, 7]; D[−3, −10, 9, 4]; E[−3, 11, 3, 7]") . Zistite, či sústava
bodov
. Zistite, či sústava
bodov  je afinne (ne)závislá a vypočítajte dimenziu afinného podpriestoru generovaného sústavou (dimenziu obalu ).
je afinne (ne)závislá a vypočítajte dimenziu afinného podpriestoru generovaného sústavou (dimenziu obalu ).
Dané sú body afinného priestoru
. Zistite, či sústava
bodov je afinne (ne)závislá a vypočítajte dimenziu afinného podpriestoru generovaného sústavou (dimenziu obalu ).
Riešenie.
Množina bodov je afinne nezávislá, ak sústava vektorov

je lineárne nezávislá. Pre súradnice týchto vektorov dostaneme
; \overrightarrow{AC}= (4, 7, −2, 1);\overrightarrow{AD} = (1, −14, 4, −2); \overrightarrow{AE}= (−5, 7, −2, 1)") .
.
Sústava vektorov W je lineárne nezávislá, ak rovnosť

je splnená práve len pre . V našom prípade to nie je splnené lebo hodnosť matice
. V našom prípade to nie je splnené lebo hodnosť matice
∼
\left(\begin{matrix}
-9 & 0 & 0 & 0 \\
0 & 7 & -2 & 1 \\
0 & -14 & 4 & -2 \\
0 & 7 & -2 & 1
\end{matrix}\right)∼
\left(\begin{matrix}
-9 & 0 & 0 & 0 \\
0 & 7 & -2 & 1 \\
0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0
\end{matrix}\right)")
je dva. Teda hodnosť je menšia ako počet vektorov, preto sústava je lineárne závislá a teda body  sú afinne závisle. Z poslednej matice vyplýva,
že dva vektory
sú afinne závisle. Z poslednej matice vyplýva,
že dva vektory  sú lineárne nezávislé a vektory
sú lineárne nezávislé a vektory  sú ich lineárne kombinácie.
Preto dimenzia podpriestoru
sú ich lineárne kombinácie.
Preto dimenzia podpriestoru  je rovná dvom. Parametrické vyjadrenie tohto podpriestoru môžeme vyjadriť ako
je rovná dvom. Parametrické vyjadrenie tohto podpriestoru môžeme vyjadriť ako
 .
.
To znamená, že body ležia v rovine  = S") .
.
Množina bodov
je afinne nezávislá, ak sústava vektorov
je lineárne nezávislá. Pre súradnice týchto vektorov dostaneme
.
Sústava vektorov W je lineárne nezávislá, ak rovnosť
je splnená práve len pre
. V našom prípade to nie je splnené lebo hodnosť matice
je dva. Teda hodnosť je menšia ako počet vektorov, preto sústava
je lineárne závislá a teda body sú afinne závisle. Z poslednej matice vyplýva,
že dva vektory sú lineárne nezávislé a vektory sú ich lineárne kombinácie.
Preto dimenzia podpriestoru je rovná dvom. Parametrické vyjadrenie tohto podpriestoru môžeme vyjadriť ako
.
To znamená, že body
ležia v rovine .
Poznámky.
- Nech je -rozmerný euklidovský priestor so zameraním a
nech
 je afinná transformácia. Potom môžeme definovať asociované zobrazenie
je afinná transformácia. Potom môžeme definovať asociované zobrazenie  afinného zobrazenia aj nasledovne:
afinného zobrazenia aj nasledovne:
 \rightarrow V_n(\mathbb R)") ,
,  \rightarrow f(X − Y ) := f(X) − f(Y )")
- Asociované zobrazenie je vlastne "reštrikcia" zobrazenia na vektorový priestor. Zobrazuje vektory
so zamerania na vektory toho istého zamerania.
\)
Analytické vyjadrenie
Pre akékoľvek geometrické zobrazenie je dôležité popísať obraz ľubovoľného bodu. Pri afinnom zobrazení najskôr urobíme analýzu analytického vyjadrenie afinného zobrazenia v euklidovskom priestore pomocou súradnicového repéra. Potom výklad zameriame na súvislosti medzi geometrickým a algebraickým poňatím afinného zobrazenia.
Nech je v je afinné zobrazenie , v ktorom sa repér  zobrazí na repér
zobrazí na repér  , pričom pre súradnice obrazov platí
, pričom pre súradnice obrazov platí
![\small f(O)=[r_1,r_2,...,r_m]](https://lms.umb.sk/filter/tex/pix.php/c5eda1f88fc333cd5842ee547a31e19d.png "\small f(O)=[r_1,r_2,...,r_m]")
=(a^i_1,a^i_2,...,a^i_m)") ,
,
kde je asociované zobrazenie.
je asociované zobrazenie.
Nech je v
je afinné zobrazenie , v ktorom sa repér
zobrazí na repér , pričom pre súradnice obrazov platí
,
kde
je asociované zobrazenie.
Veta (Obraz bodu v afinnom zobrazení).
Nech![\small X=[x_1,x_2,...,x_n]](https://lms.umb.sk/filter/tex/pix.php/a5dcae89eca8a64e02819035d3279438.png "\small X=[x_1,x_2,...,x_n]") je bod euklidovského priestoru, potom pre jeho obraz
je bod euklidovského priestoru, potom pre jeho obraz ![\small X'=[x'_1,x'_2,...,x'_m]](https://lms.umb.sk/filter/tex/pix.php/6ab3a2d90723d2e20d5aa14c22d84357.png "\small X'=[x'_1,x'_2,...,x'_m]") v afinnom zobrazení bude platiť
v afinnom zobrazení bude platiť
(REP)=
\left(\begin{array}{ccc} a^1_1&...&a^n_1 \\ a^1_2&...&a^n_2 \\
...
\\ a^1_m&...&a^n_m\end{array}\right)
\times
\left(\begin{array}{ccc}x_1 \\ x_2\\
...
\\x_n \end{array}\right)
+
\left(\begin{array}{ccc}r_1 \\ r_2\\
...\\r_m \end{array}\right)") .
.
Nech
je bod euklidovského priestoru, potom pre jeho obraz v afinnom zobrazení bude platiť
(REP)
.
Dôkaz.
V afinnom priestore platí, že afinné zobrazenie je úplne určené obrazom réperu. Réper v afinnom priestore pozostáva zo základného bodu (začiatok réperu) a množiny lineárne nezávislých vektorov  . Teda bod sa dá jednoznačne vyjadriť
ako lineárna kombinácia
. Teda bod sa dá jednoznačne vyjadriť
ako lineárna kombinácia
 resp. ako
resp. ako  ,
,
+...+ x_n f^*(\vec e_n)") .
.
+...+ x_n (a^n_1,a^i_2,...,a^n_m)") ,
,


...
 ,
,
V afinnom priestore platí, že afinné zobrazenie je úplne určené obrazom réperu. Réper v afinnom priestore pozostáva zo základného bodu
(začiatok réperu) a množiny lineárne nezávislých vektorov . Teda bod sa dá jednoznačne vyjadriť
ako lineárna kombinácia
resp. ako ,
keďže afinné zobrazenie je lineárne, tak pre obrazy v zobrazení bude platiť
bude platiť.
Po dosadení hodnôt =(a^i_1,a^i_2,...,a^i_m)") dostaneme vzťah
dostaneme vzťah
dostaneme vzťah,
odkiaľ po dostaneme
...
,
čo predstavuje rovnosť (REP).
Poznámky.
- Predchádzajúce tvrdenie hovorí, že na určenie afinného zobrazenia stačí poznať obrazy repéra.
- Jednoznačnosť analytického vyjadrenia (AV) vyplýva z jednoznačnosti vyjadrenia daného bodu
v repéri
 a z lineárnosti afinného zobrazenia.
a z lineárnosti afinného zobrazenia. - Pre obraz bodu platí
 = f(O) + x_1f^*(\vec {e_1})+\dots + x_nf^*(\vec {e_n})") .
. -
Zápis (AV) nazývame analytické vyjadrenie afinného zobrazenia
 vzhľadom k afinnej súradnicovej sústave
.
vzhľadom k afinnej súradnicovej sústave
.
Namiesto označenia ") budeme tiež používať označenie
budeme tiež používať označenie
 . V ďalších kapitolách sa zameriame na afinné zobrazenia v euklidovskej rovine,
pričom upriamime pozornosť na analytické vyjadrenia zhodných (zhodnostných) zobrazení v rovine.
. V ďalších kapitolách sa zameriame na afinné zobrazenia v euklidovskej rovine,
pričom upriamime pozornosť na analytické vyjadrenia zhodných (zhodnostných) zobrazení v rovine.
budeme tiež používať označenie
. V ďalších kapitolách sa zameriame na afinné zobrazenia v euklidovskej rovine,
pričom upriamime pozornosť na analytické vyjadrenia zhodných (zhodnostných) zobrazení v rovine.
Úlohy.
- Určte analytické vyjadrenie identického zobrazenia euklidovskej roviny - identity.
- Zistite, či rovnoľahlosť v rovine
") pre pevne zvolený stred rovnoľahlosti
pre pevne zvolený stred rovnoľahlosti  a koeficient
rovnoľahlosti
a koeficient
rovnoľahlosti  je afinné zobrazenie.
je afinné zobrazenie.
Riešenie úlohy č. 1.
Pre identitu platí, že každý bod roviny sa zobrazí sám na seba, t. j=X") . Označme súradnice vzoru ako usporiadanú dvojicu
. Označme súradnice vzoru ako usporiadanú dvojicu ") a
súradnice jeho obrazu
a
súradnice jeho obrazu ") v zobrazení ako
v zobrazení ako ") . Keďže ide o identické zobrazenie, tak musí platiť
. Keďže ide o identické zobrazenie, tak musí platiť
=(x,y)") .
.
Rovnosť usporiadaných dvojíc nastane práve vtedy, keď sa rovnajú odpovedajúce zložky. Teda, keď súčasne platia rovnosti .
.
Táto jednoduchá sústava dvoch rovníc je analytickým vyjadrením identity. Ak zapíšeme získanú sústavu dvoch rovníc v maticovom tvare, tak získame rovnicu v tvare
=\left(\begin{array}{ccc} 1&0 \\ 0&1 \end{array}\right)\times \left(\begin{array}{ccc}x \\ y \end{array}\right) + \left(\begin{array}{ccc}0 \\ 0 \end{array}\right)")
alebo v riadkovom zápise (maticou násobíme sprava!)
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} 1 & 0 \\ 0 & 1 \\ \end{array} \right)") .
.
Určte analytické vyjadrenie identického zobrazenia euklidovského priestoru .
.
Riešenie úlohy č. 2 je v ďalšej kapitole.
Pre identitu platí, že každý bod roviny sa zobrazí sám na seba, t. j
. Označme súradnice vzoru ako usporiadanú dvojicu a
súradnice jeho obrazu v zobrazení ako . Keďže ide o identické zobrazenie, tak musí platiť
.
Rovnosť usporiadaných dvojíc nastane práve vtedy, keď sa rovnajú odpovedajúce zložky. Teda, keď súčasne platia rovnosti
.
Táto jednoduchá sústava dvoch rovníc je analytickým vyjadrením identity. Ak zapíšeme získanú sústavu dvoch rovníc v maticovom tvare, tak získame rovnicu v tvare
alebo v riadkovom zápise (maticou násobíme sprava!)
.
Určte analytické vyjadrenie identického zobrazenia euklidovského priestoru
.
Riešenie úlohy č. 2 je v ďalšej kapitole.
\)
Rozšírené matice
Koncept rozšírenej matice môžeme využiť ako nástroj na jednotné/univerzálnejšie vyjadrenie afinného zobrazenia. Ide o elegantné algebraické riešenie, ktoré zjednocuje lineárnu časť a posunutie v jednej matici rozšírenej o riadok a stĺpec (tzv. homogénna matica). Zavedenie homogénnych súradníc umožňuje prechod z afinného do projektívneho rámca.
Rozšírené afinné súradnice.
Pri riešení príkladu "Tri body" sme použili matice, ktorých posledné riadky korešpondovali s podmienkou lineárnej kombinácie bodov
 .
V tomto príklade sme vlastne použili rozšírené matice, pomocou ktorých sme zjednodušili zápis analytického vyjadrenia afinného zobrazenia:
.
V tomto príklade sme vlastne použili rozšírené matice, pomocou ktorých sme zjednodušili zápis analytického vyjadrenia afinného zobrazenia:
=
\left(
\begin{array}{} a_1^1 & a_1^2 & · · · &a_1^n \\
a_2^1 & a_2^2 & · · · &a_2^{n} \\
\; \; ···\\
a_m^1 & a_m^2 & · · · &a_m^n \end{array}\right)
\times
\left(
\begin{array}{} x_1 \\ x_2 \\ · · · \\ x_n \end{array}\right)+
\left(
\begin{array}{} r_1 \\ r_2 \\ · · · \\ r_n \end{array}\right)") ktorý sme upravili pomocou "rozšírených matíc" na tvar
ktorý sme upravili pomocou "rozšírených matíc" na tvar
=
\left(
\begin{array}{} a_1^1 & a_1^2 & · · · &a_1^n & r_1 \\
a_2^1 & a_2^2 & · · · &a_2^{n} & r_2 \\
\; \; ···\\
a_m^1 & a_m^2 & · · · &a_m^n & r_m \\
0 & 0 & · · · & 0& 1 \\ \end{array}\right)
\times
\left(
\begin{array}{} x_1 \\ x_2 \\ · · · \\ x_n \\ 1 \end{array}\right)") ,
,
pričom má ten istý význam ako pri afinných súradniciach.
má ten istý význam ako pri afinných súradniciach.
Pri riešení príkladu "Tri body" sme použili matice, ktorých posledné riadky korešpondovali s podmienkou lineárnej kombinácie bodov
.
,pričom
má ten istý význam ako pri afinných súradniciach.
Rozšírené afinné súradnice sprehľadnia zápis zobrazení. Súradnice bodu ![\small X = [x_1 , . . . , x_n ]](https://lms.umb.sk/filter/tex/pix.php/1d6bb0fe4aa343a6996a595b0930f987.png "\small X = [x_1 , . . . , x_n ]") nahradíme súradnicami
nahradíme súradnicami ![\small [ x_1 , . . . , x_n,1 ]](https://lms.umb.sk/filter/tex/pix.php/a2baa221eb1ab835da5a2af8b84374ee.png "\small [ x_1 , . . . , x_n,1 ]") a súradnice
vektora
a súradnice
vektora ") nahradíme súradnicami
nahradíme súradnicami ") .
Pre takto zavedené rozšírenie platí obvyklá aritmetika s bodmi a vektormi z euklidovských priestorov, ako aj počítanie s lineárnymi kombináciami. Umožňujú vytvárať
zložené zhodné zobrazenia. Pozrite si prezentáciu
Tu.
.
Pre takto zavedené rozšírenie platí obvyklá aritmetika s bodmi a vektormi z euklidovských priestorov, ako aj počítanie s lineárnymi kombináciami. Umožňujú vytvárať
zložené zhodné zobrazenia. Pozrite si prezentáciu
Tu.
Výhody použitia rozšírených matíc
nahradíme súradnicami a súradnice
vektora nahradíme súradnicami .
Pre takto zavedené rozšírenie platí obvyklá aritmetika s bodmi a vektormi z euklidovských priestorov, ako aj počítanie s lineárnymi kombináciami. Umožňujú vytvárať
zložené zhodné zobrazenia. Pozrite si prezentáciu
Tu.
Výhody použitia rozšírených matíc
- Skladanie transformácií: Rozšírené matice umožňujú skladať viacero transformácií (napr. rotáciu, škálovanie a transláciu) do jednej matice násobením.
- Jednoduchšie výpočty: Takáto reprezentácia zjednodušuje výpočet pomocou štandardných operácií s maticami.
- Flexibilita: Rozšírené matice môžu reprezentovať širokú škálu transformácií, vrátane identít, rotácií, škálovaní, posunov a zložených transformácií.
Cvičenie.
Vyjadrite afinné zobrazenie (posunutie) o vektor
o vektor ") , ktoré zobrazuje bod
, ktoré zobrazuje bod ![\small X[\normalsize x_1,x_2]](https://lms.umb.sk/filter/tex/pix.php/51fcedd5b150fd9ccb7b8328a7071266.png "\small X[\normalsize x_1,x_2]") na bod
na bod ![\small X'[\normalsize x_1+u_1,x_2+u_2]](https://lms.umb.sk/filter/tex/pix.php/785d4c9c5cc601eebf97cf6530563dce.png "\small X'[\normalsize x_1+u_1,x_2+u_2]") pomocou rozšírenej matice.
pomocou rozšírenej matice.
Vyjadrite afinné zobrazenie (posunutie)
o vektor , ktoré zobrazuje bod na bod
pomocou rozšírenej matice.
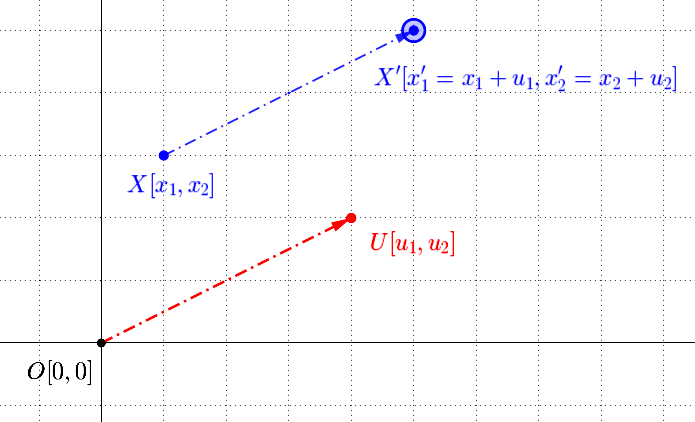
Riešenie.
Zo zadania úlohy vyplýva, že dané afinné zobrazenie je určené transformačnými rovnicami
(Tran) ,
,
ktoré môžeme zapísať pomocou matíc takto:
( )
)

=
\left( \begin{array}{ccc}
x_{1} \\
x_{2}
\end{array} \right) + \left( \begin{array}{ccc}
u_{1} \\
u_{2}
\end{array} \right)=
\left( \begin{array}{ccc}
1 & 0\\
0 & 1
\end{array} \right)
\circ
\left( \begin{array}{ccc}
x_{1} \\
x_{2}
\end{array} \right) +
\left( \begin{array}{ccc}
u_{1} \\
u_{2}
\end{array} \right)")
Pravú stranu rovnosti () (sčitovanie matíc) nahraďme rozšírenou maticou typu 3 x 3. Potom posunutie o
vektor budeme môcť vyjadriť ako súčin matíc. Hľadajme rozšírenú maticu typu 3 x 3 tak, aby platilo:

\circ
\left( \begin{array}{ccc}
x_{1} \\
x_{2} \\1
\end{array} \right)
=
\left( \begin{array}{ccc}
x_{1}+u_{1} \\
x_{2} +u_{2} \\1
\end{array} \right)") .
.
Ľahko zistíme, že matica") vyhovuje naším požiadavkám. Rovnosť () môžeme teraz zapísať v tvare
\)
vyhovuje naším požiadavkám. Rovnosť () môžeme teraz zapísať v tvare
\)
Zo zadania úlohy vyplýva, že dané afinné zobrazenie je určené transformačnými rovnicami
(Tran)
,
ktoré môžeme zapísať pomocou matíc takto:
(
)
Pravú stranu rovnosti (
) (sčitovanie matíc) nahraďme rozšírenou maticou typu 3 x 3. Potom posunutie o
vektor budeme môcť vyjadriť ako súčin matíc. Hľadajme rozšírenú maticu typu 3 x 3 tak, aby platilo:
.Ľahko zistíme, že matica
vyhovuje naším požiadavkám. Rovnosť () môžeme teraz zapísať v tvare
()
 =
\left( \begin{array}{ccc}
1&0 &u_1\\
0 & 1 &u_2\\
0 & 0 &1
\end{array} \right)
\circ
\left(\begin{array}{ccc}
x_{1} \\
x_{2} \\
1
\end{array} \right)") .
.
)
.\)
Rovnoľahlosť
V tejto kapitole sa budeme zaoberať transformáciami euklidovskej roviny - posunutím a rovnoľahlosťou. Tieto zobrazenia v syntetickom poňatí geometrie definujeme
jednoducho pomocou
- pevne zvoleného vektora -posunutie,
- pevne zvoleného bodu a skalára - homotétia alebo tiež rovnoľahlosť. Ukážeme, že tieto zobrazenia sú afinné a určíme ich transformačné matice.
Rovnoľahlosť  pre pevne zvolený stred rovnoľahlosti a koeficient
rovnoľahlosti
pre pevne zvolený stred rovnoľahlosti a koeficient
rovnoľahlosti  je afinné zobrazenie.
je afinné zobrazenie.
pre pevne zvolený stred rovnoľahlosti a koeficient
rovnoľahlosti je afinné zobrazenie.
Dôkaz.
Rovnoľahlosť") v euklidovskej rovine bodu priraďuje bod
v euklidovskej rovine bodu priraďuje bod  taký, že pre deliaci pomer bodov
taký, že pre deliaci pomer bodov  platí
platí =k") . Z definície deliaceho pomeru dostaneme vzťah
. Z definície deliaceho pomeru dostaneme vzťah
(h)") ,
,
kde![\small S[s_1,s_2] \in \mathbb E_2](https://lms.umb.sk/filter/tex/pix.php/a1c26e689f4a4cb3e1f0d602a9905e22.png "\small S[s_1,s_2] \in \mathbb E_2") je zvolený stred rovnoľahlosti a je reálny koeficient.
je zvolený stred rovnoľahlosti a je reálny koeficient.
V prvom kroku musíme ukázať (dokázať), že obrazom troch kolineárnych bodov v rovnoľahlosti sú opäť tri kolineárne body. Najskôr dokážeme toto tvrdenie analyticky.
Nech![\small A[a_1,a_2],B[b_1,b_2],C[c_1,c_2]](https://lms.umb.sk/filter/tex/pix.php/69afe175d7ed037d38d7f0b09adfa934.png "\small A[a_1,a_2],B[b_1,b_2],C[c_1,c_2]") sú ľubovoľné tri navzájom rôzne kolineárne body. Dvomi bodmi je určená práve jediná priamka
sú ľubovoľné tri navzájom rôzne kolineárne body. Dvomi bodmi je určená práve jediná priamka  . Podľa predpokladu bod je bodom priamky . V takom prípade existuje parameter
. Podľa predpokladu bod je bodom priamky . V takom prípade existuje parameter  taký, že platia rovnosti
taký, že platia rovnosti
") ,
,
") .
.
Označme![\small A'[a'_1,a'_2],B'[b'_1,b'_2],C'[c'_1,c'_2]](https://lms.umb.sk/filter/tex/pix.php/6b451b3f2a1bcbe476b54b08ff273ea9.png "\small A'[a'_1,a'_2],B'[b'_1,b'_2],C'[c'_1,c'_2]") obrazy bodov v rovnoľahlosti . Potom súradnice týchto bodov musia spĺňať vzťah (h), čo vedie k rovnostiam
obrazy bodov v rovnoľahlosti . Potom súradnice týchto bodov musia spĺňať vzťah (h), čo vedie k rovnostiam
")
")
")
pre . Upravujme posledný výraz
. Upravujme posledný výraz
=s_i-ks_i+k(a_i-t(b_i-a_i))=")
![\small =s_i-ks_i+ka_i-kt(b_i-a_i))= [𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖)]−𝑘𝑡(𝑏_𝑖−𝑠_𝑖−𝑎_𝑖+𝑠_𝑖)=](https://lms.umb.sk/filter/tex/pix.php/c681a01115932036b0e5d058fc3e367d.png "\small =s_i-ks_i+ka_i-kt(b_i-a_i))= [𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖)]−𝑘𝑡(𝑏_𝑖−𝑠_𝑖−𝑎_𝑖+𝑠_𝑖)=")
![\small=𝑎′_𝑖−𝑘𝑡[(𝑏_𝑖−𝑠_𝑖)−(𝑎_𝑖−𝑠_𝑖)]=](https://lms.umb.sk/filter/tex/pix.php/52d68a8f94debc432367bf18d957ad68.png "\small=𝑎′_𝑖−𝑘𝑡[(𝑏_𝑖−𝑠_𝑖)−(𝑎_𝑖−𝑠_𝑖)]=")
![\small=𝑎′_𝑖−𝑡[(𝑠_𝑖+𝑘(𝑏_𝑖−𝑠_𝑖))−(𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖))]=](https://lms.umb.sk/filter/tex/pix.php/6b742adedf4d1e34816b71e1be573abd.png "\small=𝑎′_𝑖−𝑡[(𝑠_𝑖+𝑘(𝑏_𝑖−𝑠_𝑖))−(𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖))]=")
![\small=𝑎′_𝑖+𝑡[𝑏′_𝑖−𝑎′_𝑖]](https://lms.umb.sk/filter/tex/pix.php/a95d131333c85242a71483af33b7ce7f.png "\small=𝑎′_𝑖+𝑡[𝑏′_𝑖−𝑎′_𝑖]") .
.
Dostali sme výraz, ktorý nám hovorí, že obraz bodu v zobrazení
bodu v zobrazení ") leží na priamke určenej
bodmi
leží na priamke určenej
bodmi  . Odkiaľ vyplýva, že zobrazenie zachováva kolineárnosť a preto je afinným zobrazením.
. Odkiaľ vyplýva, že zobrazenie zachováva kolineárnosť a preto je afinným zobrazením.
Syntetický (konštrukčný) dôkaz tvrdenia, že rovnoľahlosť zachováva kolineárnosť je pomerne jednoduchý. Stačí využiť vlastnosť, že v rovnoľahlosti sa rovnobežnosť zachováva. Pozrite si nasledujúci obrázok. Vlastnosť zachovania kolineárnosti vyplýva z podobnosti trojuholníkov a
a  .
.
Rovnoľahlosť
v euklidovskej rovine bodu priraďuje bod taký, že pre deliaci pomer bodov platí . Z definície deliaceho pomeru dostaneme vzťah(h)
,
kde
je zvolený stred rovnoľahlosti a je reálny koeficient.
V prvom kroku musíme ukázať (dokázať), že obrazom troch kolineárnych bodov v rovnoľahlosti sú opäť tri kolineárne body. Najskôr dokážeme toto tvrdenie analyticky.
Nech
sú ľubovoľné tri navzájom rôzne kolineárne body. Dvomi bodmi je určená práve jediná priamka . Podľa predpokladu bod je bodom priamky . V takom prípade existuje parameter taký, že platia rovnosti
,.Označme
obrazy bodov v rovnoľahlosti . Potom súradnice týchto bodov musia spĺňať vzťah (h), čo vedie k rovnostiam
pre
. Upravujme posledný výraz
.
Dostali sme výraz, ktorý nám hovorí, že obraz
bodu v zobrazení leží na priamke určenej
bodmi . Odkiaľ vyplýva, že zobrazenie zachováva kolineárnosť a preto je afinným zobrazením.
Syntetický (konštrukčný) dôkaz tvrdenia, že rovnoľahlosť zachováva kolineárnosť je pomerne jednoduchý. Stačí využiť vlastnosť, že v rovnoľahlosti sa rovnobežnosť zachováva. Pozrite si nasledujúci obrázok. Vlastnosť zachovania kolineárnosti vyplýva z podobnosti trojuholníkov
a .
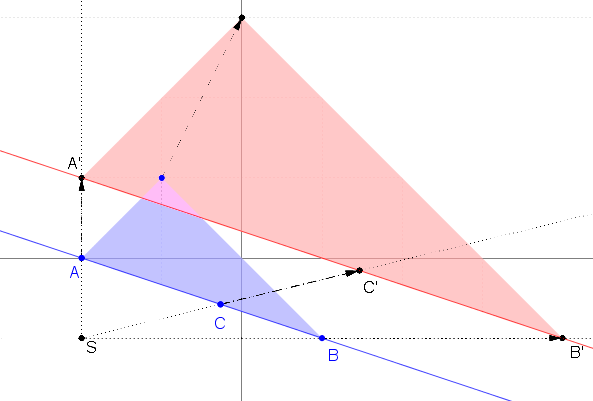
Vzťah (h) je vlastne parametrické vyjadrenie a predstavuje transformáciu roviny , ktorá bodu ![\small X[x,y] \in \mathbb E_2](https://lms.umb.sk/filter/tex/pix.php/e08e134049c7de5555f4ceb42445fae2.png "\small X[x,y] \in \mathbb E_2") v rovnoľahlosti priradí bod
v rovnoľahlosti priradí bod
![\small X'[x',y'] \in \mathbb E_2](https://lms.umb.sk/filter/tex/pix.php/95b6089b0fb9d1a688d01934e8311f0f.png "\small X'[x',y'] \in \mathbb E_2") . Tento vzťah môžeme po jednoduchej úprave upraviť na sústavu dvoch rovníc o dvoch neznámych
. Tento vzťah môžeme po jednoduchej úprave upraviť na sústavu dvoch rovníc o dvoch neznámych 

 ,
,
kde=s_1 (1-k);𝑜′_2=𝑠_2 (1-k)") .
.
Usporiadaná dvojica![\small [s_1(1-k),𝑠_2(1-k)]](https://lms.umb.sk/filter/tex/pix.php/2f077ed49890c27918ec06940cf36776.png "\small [s_1(1-k),𝑠_2(1-k)]") predstavuje súradnice obrazu počiatku
predstavuje súradnice obrazu počiatku ![\small O[0,0]](https://lms.umb.sk/filter/tex/pix.php/ab786f1f1348064c3558f8b3acc41e8c.png "\small O[0,0]") v rovnoľahlosti .
K dôkazu stačí dosadiť súradnice začiatku do vzťahu (h).
v rovnoľahlosti .
K dôkazu stačí dosadiť súradnice začiatku do vzťahu (h).
Preskúmajme aké budú obrazy súradnicových ortonormálnych vektorov![\small \vec e_1=E_1-O=[1,0];\vec e_2=E_2-O=[0,1]](https://lms.umb.sk/filter/tex/pix.php/65697fba787ddf89773c3cd0e64c3e7b.png "\small \vec e_1=E_1-O=[1,0];\vec e_2=E_2-O=[0,1]") v rovnoľahlosti . Dosadením súradníc
bodov
v rovnoľahlosti . Dosadením súradníc
bodov  do vzťahu (h) dostaneme pre obrazy
do vzťahu (h) dostaneme pre obrazy 
![\small E_1'=[k+s_1(1-k),s_2(1-k)],E_2'=[s_1(1-k),k+s_2(1-k)]](https://lms.umb.sk/filter/tex/pix.php/a57bd414561b5998b36d7af96b142cda.png "\small E_1'=[k+s_1(1-k),s_2(1-k)],E_2'=[s_1(1-k),k+s_2(1-k)]") ,
,
po dosadení súradníc![\small O'[s_1(1-k),𝑠_2(1-k)]](https://lms.umb.sk/filter/tex/pix.php/2d7c09fd2b900d768d74871f7bc77ed7.png "\small O'[s_1(1-k),𝑠_2(1-k)]") do rozdielov
do rozdielov  dostaneme súradnice obrazov
dostaneme súradnice obrazov 
![\small \vec e_1'=([k+s_1(1-k)]-[s_1(1-k)],[s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(k,0)};\\ \small \vec e_2'=([s_1(1-k)]-[s_1(1-k)],[k+s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(0,k)}](https://lms.umb.sk/filter/tex/pix.php/e7a44d83fd3a9987dbebea6aff9a1390.png "\small \vec e_1'=([k+s_1(1-k)]-[s_1(1-k)],[s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(k,0)};\\ \small \vec e_2'=([s_1(1-k)]-[s_1(1-k)],[k+s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(0,k)}")
Súradnice obrazov súradnicových ortonormálnych vektorov sú závisé len od koeficienta .
.
V súlade s definíciou analytického vyjadrenia afinného zobrazenia môžeme vyjadriť rovnoľahlosť v rovine pomocou rozšíreného maticového tvaru takto:
v rovine pomocou rozšíreného maticového tvaru takto:
 =
\left(\begin{array}{} k & 0 & o'_1 \\ 0 & k & o'_2 \\ 0 & 0 & 1 \\ \end{array} \right)
\times
\left( \begin{array}{} x \\ y \\ 1 \end{array} \right)") .
.
, ktorá bodu v rovnoľahlosti priradí bod
. Tento vzťah môžeme po jednoduchej úprave upraviť na sústavu dvoch rovníc o dvoch neznámych
,
kde
.
Usporiadaná dvojica
predstavuje súradnice obrazu počiatku v rovnoľahlosti .
K dôkazu stačí dosadiť súradnice začiatku do vzťahu (h).
Preskúmajme aké budú obrazy súradnicových ortonormálnych vektorov
v rovnoľahlosti . Dosadením súradníc
bodov do vzťahu (h) dostaneme pre obrazy
,
po dosadení súradníc
do rozdielov dostaneme súradnice obrazov
Súradnice obrazov súradnicových ortonormálnych vektorov sú závisé len od koeficienta
.
V súlade s definíciou analytického vyjadrenia afinného zobrazenia môžeme vyjadriť rovnoľahlosť
v rovine pomocou rozšíreného maticového tvaru takto:
.
Poznámky.
- Maticu
") nazývame matica afinného zobrazenia (rovnoľahlosti), pričom prvky prvého (resp. druhého) stĺpca tejto matice predstavujú súradnice vektora
nazývame matica afinného zobrazenia (rovnoľahlosti), pričom prvky prvého (resp. druhého) stĺpca tejto matice predstavujú súradnice vektora  (resp. vektora
(resp. vektora  ), ktorý je obrazom vektora (resp. vektora
), ktorý je obrazom vektora (resp. vektora  ) v danej rovnoľahlosti. V rovnoľahlosti rovnobežnosť sa zachováva, preto vektory a
) v danej rovnoľahlosti. V rovnoľahlosti rovnobežnosť sa zachováva, preto vektory a  sú lineárne závislé, pričom
sú lineárne závislé, pričom  .
. - V transformačných rovniciach koeficienty pri neznámej
 (resp.
(resp.  ) predstavujú súradnice vektora
(resp. vektora
) predstavujú súradnice vektora
(resp. vektora  ).
).
Cvičenie.
V rovnoľahlosti, ktorá zobrazuje![\small A[-2,0] \rightarrow A'[-2,1],B[1,-1] \rightarrow B'[4,-1],C[-1,1] \rightarrow C'[0,3]](https://lms.umb.sk/filter/tex/pix.php/36c60da4c8ebc2dcdbeffef4aa2df2b6.png "\small A[-2,0] \rightarrow A'[-2,1],B[1,-1] \rightarrow B'[4,-1],C[-1,1] \rightarrow C'[0,3]") nájdite obrazy
začiatku a jednotkových vektorov
nájdite obrazy
začiatku a jednotkových vektorov  ,
kde
,
kde ![\small E_1=[1,0],E_2=[0,1]](https://lms.umb.sk/filter/tex/pix.php/9348bdf47b8863f702b935e218adefe1.png "\small E_1=[1,0],E_2=[0,1]") .
.
V rovnoľahlosti, ktorá zobrazuje
nájdite obrazy
začiatku a jednotkových vektorov ,
kde .
Riešenie. Využite riešenie príkladu "Tri body" v kapitole "Afinné zobrazenie". Pozrite si grafické riešenie
Tu.
\)
Obraz troch bodov
V tejto podkapitole rozvíjame praktický aspekt afinného zobrazenia, konkrétne jeho určenie pomocou obrazov troch lineárne nezávislých bodov. Ide o aplikáciu vety o jednoznačnosti afinného zobrazenia.
Nech je daná - tica bodov  v euklidovskom priestore taká, že
v euklidovskom priestore taká, že ") - tica vektorov
- tica vektorov  so zamerania je nezávislá. V tomto prípade sústava
so zamerania je nezávislá. V tomto prípade sústava  tvorí repér tohto priestoru. Takejto - tici bodov budeme hovoriť, že je lineárne nezávislá.
tvorí repér tohto priestoru. Takejto - tici bodov budeme hovoriť, že je lineárne nezávislá.
- tica bodov v euklidovskom priestore taká, že - tica vektorov so zamerania je nezávislá. V tomto prípade sústava tvorí repér tohto priestoru. Takejto - tici bodov budeme hovoriť, že je lineárne nezávislá.
Vo vete "Jednoznačnosť afinného zobrazenia" sme dokázali, že afinné zobrazenie je jednoznačne určené obrazmi lineárne nezávislých bodov euklidovského priestoru .Dôkaz tohto tvrdenia nájdete aj v práci [Chalmoviansky, 2022].
V ďalšej časti sa zameriame na určenie transformačných rovníc afinného zobrazenia v euklidovskej rovine, v ktorom sú dané dve trojice odpovedajúcich nekolineárnych bodov. Začneme trojicami, ktoré vyhovujú rovnoľahlosti, čo nám uľahčí kontrolu správnosti určenia transformačných rovníc.
je jednoznačne určené obrazmi lineárne nezávislých bodov euklidovského priestoru .Dôkaz tohto tvrdenia nájdete aj v práci [Chalmoviansky, 2022].
V ďalšej časti sa zameriame na určenie transformačných rovníc afinného zobrazenia v euklidovskej rovine
, v ktorom sú dané dve trojice odpovedajúcich nekolineárnych bodov. Začneme trojicami, ktoré vyhovujú rovnoľahlosti, čo nám uľahčí kontrolu správnosti určenia transformačných rovníc.
Cvičenie.
Určte transformačné rovnice afinného zobrazenia , v ktorom
, v ktorom
 \rightarrow A'(4,2);\; \;B(\frac{3}{2},-\frac{3}{2}) \rightarrow B'(\frac{11}{4},-\frac{1}{2}),\; \;C(-3,0) \rightarrow C'(2,4)") .
.
Určte transformačné rovnice afinného zobrazenia
, v ktorom
.
Riešenie.
Riešenie pomocou rozšírených matíc sme popísali v predchádzajúcich kapitolách. Teraz pre úplnosť ukážeme aj riešenie, v ktorom sa budeme opierať o sústavu 6 rovníc o 6 neznámych. Takéto riešenie je však technicky náročnejšie a dosť nepraktické.
Pre bod v rovine platí, že je lineárnou kombináciou bodov  ;B(\frac{3}{2},-\frac{3}{2});C(-3,0)") ,
preto platí
,
preto platí
+b(\frac{3}{2},-\frac{3}{2})+c(-3,0)") , pričom
, pričom 
V kapitole "Afinné zobrazenie" sme ukázali, že transformačné rovnice afinného zobrazenia v euklidovskom priestore majú tvar
majú tvar

kde sú súradnice obrazov vektorov bázy
sú súradnice obrazov vektorov bázy  a súradnice obrazu začiatku repéra
a súradnice obrazu začiatku repéra  . Dosaďme súradnice
bodov
. Dosaďme súradnice
bodov  do týchto transformačných rovníc. Po úprave dostaneme dve rovnice o 6 neznámych . Konkrétne to budú rovnice
do týchto transformačných rovníc. Po úprave dostaneme dve rovnice o 6 neznámych . Konkrétne to budú rovnice

Postupne ak dosadíme súradnice ďalších bodov dostaneme ďalšie 4 rovnice.
dostaneme ďalšie 4 rovnice.



Spolu je to sústava 6 lineárnych rovníc, ktorá vzhľadom na zadanie (nekolineárne body) bude mať práve jedno riešenie. Vypíšte všetkých 6 rovníc a potom vyriešte túto sústavu.
Riešenie pomocou rozšírených matíc sme popísali v predchádzajúcich kapitolách. Teraz pre úplnosť ukážeme aj riešenie, v ktorom sa budeme opierať o sústavu 6 rovníc o 6 neznámych. Takéto riešenie je však technicky náročnejšie a dosť nepraktické.
Pre bod
v rovine platí, že je lineárnou kombináciou bodov ,
preto platí
, pričom V kapitole "Afinné zobrazenie" sme ukázali, že transformačné rovnice afinného zobrazenia v euklidovskom priestore
majú tvar
kde
sú súradnice obrazov vektorov bázy a súradnice obrazu začiatku repéra . Dosaďme súradnice
bodov do týchto transformačných rovníc. Po úprave dostaneme dve rovnice o 6 neznámych . Konkrétne to budú rovnice
Postupne ak dosadíme súradnice ďalších bodov
dostaneme ďalšie 4 rovnice.
Spolu je to sústava 6 lineárnych rovníc, ktorá vzhľadom na zadanie (nekolineárne body) bude mať práve jedno riešenie. Vypíšte všetkých 6 rovníc a potom vyriešte túto sústavu.
Vzhľadom na to, že poznáme obrazy troch lineárne nezávislých bodov, môžeme ľubovoľný bod roviny vyjadriť ako afinnú kombináciu týchto bodov. Následne aplikujeme rovnakú kombináciu na ich obrazy, čím získame obraz daného bodu v afinnom zobrazení. Tento prístup je didakticky výhodný, pretože umožňuje jasne sledovať závislosť výpočtu od barycentrických súradníc a zároveň vedie k elegantnému vyjadreniu výsledku prostredníctvom maticového počtu – ten je navyše podporený aj v prostredí GeoGebry.
Riešenie danej sústavy 6 rovníc so 6 neznámymi s pravou stranou pomocou GeoGebry:
 & 0 & \left(-1,5\right) & 0 & 1 & 0 \\
0 & \left(1,5\right) & 0 & \left(-1,5\right) & 0 & 1 \\
-3 & 0 & 0 & 0 & 1 & 0 \\
0 & -3 & 0 & 0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
a \\
b \\
c \\
d \\
p \\
q
\end{matrix}\right)=
\left(\begin{matrix}
4 \\
2 \\
2,75 \\
-0,5\\
2 \\
4
\end{matrix}\right)")
Výsledok.=
\left(\begin{matrix}
-0,25 \\
-1 \\
-1,25\\
0 \\
1,25\\
1
\end{matrix}\right)")
Transformačné rovnice skúmaného afinného zobrazenia sú prezentované na ďalšom obrázku v ľavej časti obrázka.
Matica zobrazenia v tomto príklade má tvar ") ,
čo predstavuje osovú afinitu.
,
čo predstavuje osovú afinitu.
Riešenie danej sústavy 6 rovníc so 6 neznámymi s pravou stranou pomocou GeoGebry:
Výsledok.
Transformačné rovnice skúmaného afinného zobrazenia sú prezentované na ďalšom obrázku v ľavej časti obrázka.
Matica zobrazenia
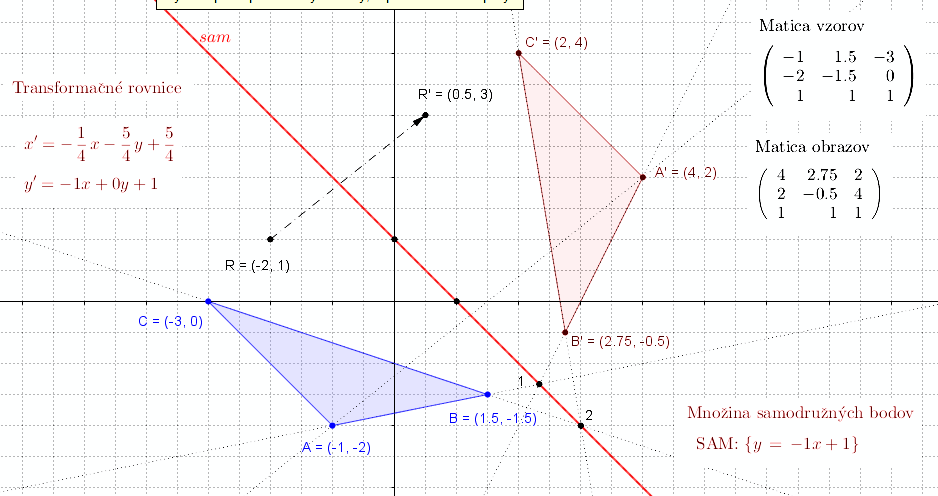 v tomto príklade má tvar ,
čo predstavuje osovú afinitu.
v tomto príklade má tvar ,
čo predstavuje osovú afinitu.
Cvičenie - nájdite chybu.
Pozrite si geometrický spôsob riešenia podobnej úlohy, v ktorom sa využíva program GeoGebra. Otvorte si interaktívnu konštrukciu Tu.
V tejto konštrukcii je nesprávne zadaná hodnota v matici vzorov. Nájdite túto zle zadanú hodnotu a opravte ju.
Pozrite si geometrický spôsob riešenia podobnej úlohy, v ktorom sa využíva program GeoGebra. Otvorte si interaktívnu konštrukciu Tu.
V tejto konštrukcii je nesprávne zadaná hodnota v matici vzorov. Nájdite túto zle zadanú hodnotu a opravte ju.
\)
Obraz repéra
Afinné zobrazenie je jednoznačne určené obrazom súradného repéra. Táto kapitola predstavuje jeden z kľúčových bodov v analytickom prístupe ku geometrii – ukazuje, ako sa z geometrickej informácie o tom, kam sa zobrazia základné prvky súradnicového systému, dá určiť celé zobrazenie. V praxi sa s takýmto prístupom stretávame v grafických softvéroch, animáciách či pri automatizovanej transformácii objektov. Dôležité je pochopiť, že zafixovaním toho, čo sa stane s „kostrou“ priestoru (počiatkom a súradnými vektormi), sa určuje spôsob, akým sa bude transformovať celý priestor.
a súradnými vektormi), sa určuje spôsob, akým sa bude transformovať celý priestor.
Z analytického vyjadrenia (REP) afinného zobrazenia  vyplýva, že takéto afinné zobrazenie je jednoznačne určené, ak poznáme obraz
vyplýva, že takéto afinné zobrazenie je jednoznačne určené, ak poznáme obraz  súradného repéru
súradného repéru  v tomto zobrazení. Analytické vyjadrenie daného zobrazenia je určené vzťahom (AV) v kapitole "Analytické vyjadrenie".
v tomto zobrazení. Analytické vyjadrenie daného zobrazenia je určené vzťahom (AV) v kapitole "Analytické vyjadrenie".
V tejto kapitole sa budeme zaoberať transformáciami euklidovskej roviny)") , ktorá má repér
, ktorá má repér
![\small \mathcal R =\left\langle O[0,0];\pmb {e_1}=(1,0),\pmb {e_2}=(0,1)\right\rangle](https://lms.umb.sk/filter/tex/pix.php/2831d609507dca97ba6f6635794431e6.png "\small \mathcal R =\left\langle O[0,0];\pmb {e_1}=(1,0),\pmb {e_2}=(0,1)\right\rangle") . Nech tento súradný repér v afinnom zobrazení sa zobrazí na repér
. Nech tento súradný repér v afinnom zobrazení sa zobrazí na repér
 . Vektory
. Vektory  sú lineárne nezávislé, preto aj ich obrazy
sú lineárne nezávislé, preto aj ich obrazy  z predpokladu vyplýva, že sú lineárne nezávislé. Dokážte to!
z predpokladu vyplýva, že sú lineárne nezávislé. Dokážte to!
vyplýva, že takéto afinné zobrazenie je jednoznačne určené, ak poznáme obraz súradného repéru v tomto zobrazení. Analytické vyjadrenie daného zobrazenia je určené vzťahom (AV) v kapitole "Analytické vyjadrenie".
V tejto kapitole sa budeme zaoberať transformáciami euklidovskej roviny
, ktorá má repér
. Nech tento súradný repér v afinnom zobrazení sa zobrazí na repér
. Vektory sú lineárne nezávislé, preto aj ich obrazy z predpokladu vyplýva, že sú lineárne nezávislé. Dokážte to!
Maticový zápis pre rovinné afinné zobrazenie  určené obrazom repéra
určené obrazom repéra  bude mať nasledovný tvar
bude mať nasledovný tvar
=\left(\begin{array}{ccc} a&c \\ b&d \end{array}\right)\times \left(\begin{array}{ccc}x \\ y \end{array}\right) + \left(\begin{array}{ccc}p \\ q \end{array}\right)") alebo
alebo
=\left(\begin{array}{ccc} a&c&p \\
b&d&q \\
0&0&1
\end{array}\right)
\times
\left(\begin{array}{ccc}x \\ y\\1 \end{array}\right)") ,
,
kde=f^*(\vec e_1), (c,d)=f^*(\vec e_2)") sú obrazy súradnicových vektorov v asociovanom zobrazení a
sú obrazy súradnicových vektorov v asociovanom zobrazení a ![\small [p,q]=f(O)](https://lms.umb.sk/filter/tex/pix.php/feb3f3a5de864768600e9bca42c058f3.png "\small [p,q]=f(O)") je obraz začiatku súradnej sústavy v afinnom zobrazení .
je obraz začiatku súradnej sústavy v afinnom zobrazení .
určené obrazom repéra bude mať nasledovný tvar
alebo
,
kde
sú obrazy súradnicových vektorov v asociovanom zobrazení a je obraz začiatku súradnej sústavy v afinnom zobrazení .
Matica ") sa nazýva transformačná matica afinného zobrazenia .
sa nazýva transformačná matica afinného zobrazenia .
Pri určovaní afinného zobrazenia, ktoré je určené obrazom , môžeme transformačné rovnice určiť priamo pomocou súradníc obrazu počiatku
, môžeme transformačné rovnice určiť priamo pomocou súradníc obrazu počiatku  a súradníc vektorov
a súradníc vektorov  . Súradnice obrazu ľubovoľného bodu roviny potom môžeme získať tak, že do transformačných rovníc dosadíme súradnice
bodu
. Súradnice obrazu ľubovoľného bodu roviny potom môžeme získať tak, že do transformačných rovníc dosadíme súradnice
bodu ![\small P[x_p, y_p]](https://lms.umb.sk/filter/tex/pix.php/f7bff613390be76a0f1fa7b64a9da5b3.png "\small P[x_p, y_p]") .
.
sa nazýva transformačná matica afinného zobrazenia .
Pri určovaní afinného zobrazenia, ktoré je určené obrazom
, môžeme transformačné rovnice určiť priamo pomocou súradníc obrazu počiatku a súradníc vektorov . Súradnice obrazu ľubovoľného bodu roviny potom môžeme získať tak, že do transformačných rovníc dosadíme súradnice
bodu .
Príklad - obraz bodu a kružnice euklidovskej roviny.
a kružnice euklidovskej roviny.
-
Určte transformačné rovnice afinného zobrazenia, ktoré postupne zobrazuje body súradného repéra
![\small O=[0, 0], E_1=[1, 0],E_2=[0, 1]](https://lms.umb.sk/filter/tex/pix.php/56ce3f57c162b4eb54eff0ef324ee891.png "\small O=[0, 0], E_1=[1, 0],E_2=[0, 1]") do bodov
do bodov
![\small O'=O[0, 0], E_1'=E_1[1, 0], E_2'=[\frac{1}{2},\frac{\sqrt{3}}{2}]](https://lms.umb.sk/filter/tex/pix.php/e4851d242d578efca580e2dc281bee93.png "\small O'=O[0, 0], E_1'=E_1[1, 0], E_2'=[\frac{1}{2},\frac{\sqrt{3}}{2}]") v tomto poradí.
v tomto poradí. - Určte obraz ľubovoľného bodu .
- Určte obraz kružnice
![\small k(S=[0, 0],r=3)](https://lms.umb.sk/filter/tex/pix.php/4af7ad0874964396095d6e079d2d64e7.png "\small k(S=[0, 0],r=3)") pomocou nástroja "Množina bodov".
pomocou nástroja "Množina bodov". - Pokúste sa toto afinné zobrazenie geometricky interpretovať. Príklad je prevzatý z práce [CHP, 2010], Cvičenie 29.
Riešenie.
- Najskôr musíme určiť obraz súradného repéra
 . Keďže začiatok súradnej sústavy bod
. Keďže začiatok súradnej sústavy bod ![\small O=O'[0, 0]](https://lms.umb.sk/filter/tex/pix.php/3e365e95cef0de0e28fa7bc6aefcd085.png "\small O=O'[0, 0]") je samodružný, tak pre obrazy vektorov bude platiť
je samodružný, tak pre obrazy vektorov bude platiť , \vec e'_2=(\frac{1}{2},\frac{\sqrt{3}}{2})") .
Transformačné rovnice určíme dosadením súradníc obrazov vektorov
.
Transformačné rovnice určíme dosadením súradníc obrazov vektorov 

a súradníc bodu![\small O'[p=0, q=0]](https://lms.umb.sk/filter/tex/pix.php/3157dd0faaba26df499fd924dc638db3.png "\small O'[p=0, q=0]") do sústavy dvoch lineárnych rovníc o dvoch neznámych
do sústavy dvoch lineárnych rovníc o dvoch neznámych

Dostaneme transformačné rovnice
- Súradnice obrazu ľubovoľného bodu určíme dosadením jeho súradníc
 do transformačných rovníc. Pre súradnice
do transformačných rovníc. Pre súradnice
 dostaneme
dostaneme


Výsledok napríklad pre bod![\small P[-2, 3]](https://lms.umb.sk/filter/tex/pix.php/510391cd5be21da625dd57b7daa77115.png "\small P[-2, 3]") je
je ![\small P'\left [-\frac{1}{2}, \frac{3 \sqrt(3)}{2} \right ]](https://lms.umb.sk/filter/tex/pix.php/a5ce5c70f8eb8eb57367fa0a12072ec2.png "\small P'\left [-\frac{1}{2}, \frac{3 \sqrt(3)}{2} \right ]") .
. - Samostatná práca: V GeoGebra applete (upravte applet "Kompletné grafické riešenie ..." z príkladu Tri body) si zvoľte si ľubovoľnú kružnicu
") a na nej si zvoľte ľubovoľný "Bod na objekte"
a na nej si zvoľte ľubovoľný "Bod na objekte"  .
Potom vo vlastnostiach bodu v definícii zadajte P=L. Nakoniec aktivujte nástroj "Množina bodov" a kliknite postupne na bod
a potom na bod .
.
Potom vo vlastnostiach bodu v definícii zadajte P=L. Nakoniec aktivujte nástroj "Množina bodov" a kliknite postupne na bod
a potom na bod .
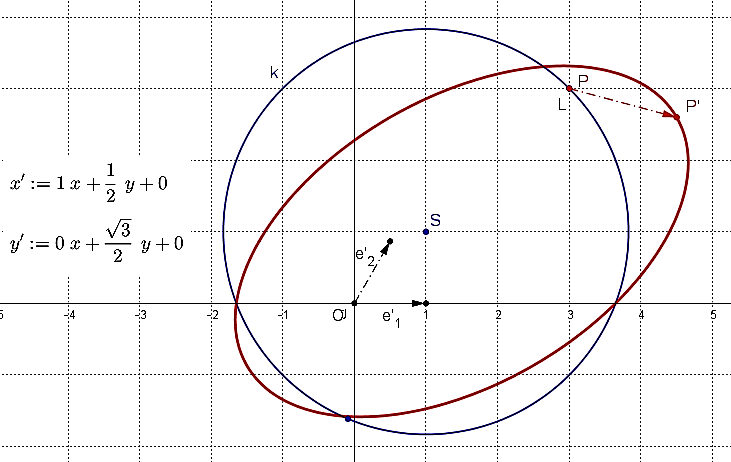
- Na základe obrazu kružnice ide o osovú afinitu, ktorej os je x-ová súradná os. Ukážte, že každý bod x-ovej súradnej osi je samodružný.
- Kompletná konštrukcia - "Dynamický repér" Tu.
Uvádzame aj určenie rovníc pomocou maticovej kalkulačky
=
\left(\begin{matrix}
1 & \frac{1}{2} & 0 \\
0 & \frac{\sqrt{3}}{2} & 0 \\
1 & 1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
1 & 0 & 0 \\
0 & 1 & 0 \\
-1 & -1 & 1
\end{matrix}\right)
\times
\left(\begin{matrix} x \\ y \\ 1 \end{matrix}\right)=\left(\begin{matrix}
x+\frac{1}{2}y \\
\frac{\sqrt{3}}{2}y \\
1
\end{matrix}\right)") .
.
.\)
Samodružnosť
Definícia (Samodružný bod).
Bod v afinnom zobrazení  je samodružný práve vtedy, ak sa v zobrazení zobrazí sám na seba
je samodružný práve vtedy, ak sa v zobrazení zobrazí sám na seba
 = X") .
.
Bod
v afinnom zobrazení je samodružný práve vtedy, ak sa v zobrazení zobrazí sám na seba
.
Samodružné body afinnej transformácie pre  jednoducho nájdeme ako riešenie sústavy dvoch rovníc
jednoducho nájdeme ako riešenie sústavy dvoch rovníc

Vyriešiť tieto rovnice je jednoduché, ak poznáme koeficienty a,b,c,d,p,q.
jednoducho nájdeme ako riešenie sústavy dvoch rovníc
Vyriešiť tieto rovnice je jednoduché, ak poznáme koeficienty a,b,c,d,p,q.
Poznámky.
Z pohľadu syntetickej geometrie táto sústava dvoch rovníc predstavuje dve priamky v rovine. Vyriešiť sústavu znamená teda nájsť spoločné body dvoch priamok a to môže byť
Z pohľadu syntetickej geometrie táto sústava dvoch rovníc predstavuje dve priamky v rovine. Vyriešiť sústavu znamená teda nájsť spoločné body dvoch priamok a to môže byť
- prázdna množina – vtedy afinné zobrazenie nemá samodružný bod
- existuje priesečník priamok – afinné zobrazenie má jeden samodružný bod
- priamky sú totožné - afinné zobrazenie má priamku samodružných bodov.
Cvičenie.
Nájdite samodružné body afinného zobrazenia, v ktorom sa súradný repér zobrazí na repér
![\small \mathcal R' = \left \langle O'[2,2]; \vec e'_1(0,-1), \vec e'_2(-1,0) \right\rangle](https://lms.umb.sk/filter/tex/pix.php/7d1bde7a41c515aa3b7aaf176b3fb025.png "\small \mathcal R' = \left \langle O'[2,2]; \vec e'_1(0,-1), \vec e'_2(-1,0) \right\rangle") .
.
Nájdite samodružné body afinného zobrazenia, v ktorom sa súradný repér zobrazí na repér
.
Transformačné rovnice budú mať tvar

Nasledujúci obrázok predstavuje grafickú interpretáciu tohto afinného zobrazenie v rovine. Bod,y(M))") je pohyblivý, ktorého obraz je bod
je pohyblivý, ktorého obraz je bod  .
Bod má v afinnom zobrazení súradnice
.
Bod má v afinnom zobrazení súradnice  + c y(M) + p, b x(M) + d y(M) + q)") , kde (\small a,b,c,d,p,q\) sú súradnice obrazu repéra.
Applet k tomuto cvičeniu si môžete otvoriť
Tu.
, kde (\small a,b,c,d,p,q\) sú súradnice obrazu repéra.
Applet k tomuto cvičeniu si môžete otvoriť
Tu.
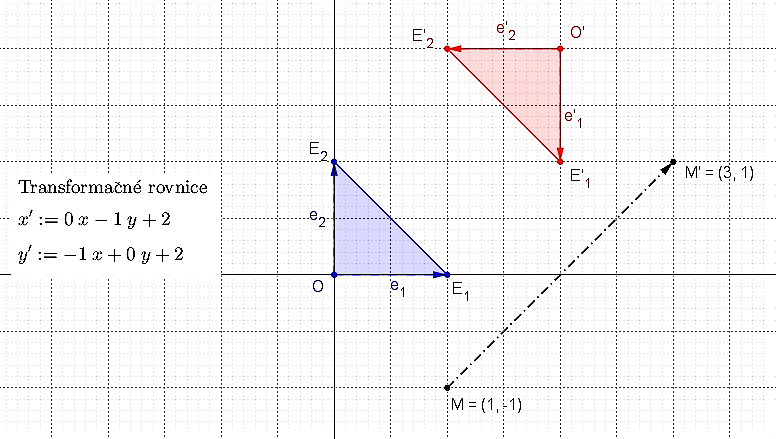
Samodružné body afinnej transformácie jednoducho nájdeme ako riešenie rovnice
= \left(\begin{matrix}
0 & -1 \\
-1 & 0
\end{matrix}\right) \times \left(\begin{array}{ccc}x \\ y \end{array}\right) + \left(\begin{array}{ccc}2 \\ 2 \end{array}\right)")
Po rozpísaní dostaneme sústava dvoch rovníc, ktorá bude mať tvar

Ľahko nahliadneme, že rovnice sú lineárne závislé (dokonca rovné). Preto množina bodov, ktoré sú riešením danej sústavy je priamka .
Presnejšie: každý bod priamky
.
Presnejšie: každý bod priamky

je samodružný. Zobrazenie, ktoré má priamku bodovo samodružnú, je buď osová súmernosť alebo osová afinita. V našom prípade je to osová súmernosť s osou súmernosti.
Nasledujúci obrázok predstavuje grafickú interpretáciu tohto afinného zobrazenie v rovine. Bod
je pohyblivý, ktorého obraz je bod .
Bod má v afinnom zobrazení súradnice , kde (\small a,b,c,d,p,q\) sú súradnice obrazu repéra.
Applet k tomuto cvičeniu si môžete otvoriť
Tu.
Samodružné body afinnej transformácie jednoducho nájdeme ako riešenie rovnice
Po rozpísaní dostaneme sústava dvoch rovníc, ktorá bude mať tvar
Ľahko nahliadneme, že rovnice sú lineárne závislé (dokonca rovné). Preto množina bodov, ktoré sú riešením danej sústavy je priamka
.
Presnejšie: každý bod priamky
je samodružný. Zobrazenie, ktoré má priamku bodovo samodružnú, je buď osová súmernosť alebo osová afinita. V našom prípade je to osová súmernosť s osou súmernosti
.
Úlohy.
Určite samodružné body afinného zobrazenia určeného transformačnými rovnicami:
Určite samodružné body afinného zobrazenia určeného transformačnými rovnicami:


- Úlohy zo zbierky [MOZ], Úlohy 3.5.1 až 3.5.7.
Riešenie
- Po úprave dostaneme

Applet Tu. - Po úprave dostaneme
 .
. - Použite nástroje CAS "Riešenie sústavy rovníc".
Tvrdenie - určenie afinného zobrazenia.
Afinné zobrazenie v - rozmernom euklidovskom priestore je jednoznačne určené obrazmi
lineárne nezávislými bodmi
daného euklidovského priestoru.
Afinné zobrazenie
v - rozmernom euklidovskom priestore je jednoznačne určené obrazmi
lineárne nezávislými bodmi
daného euklidovského priestoru
.
Dôkaz.
Je založený na vlastnosti, že lineárne nezávislých bodov  určuje repér
určuje repér 
Je založený na vlastnosti, že
lineárne nezávislých bodov určuje repér
\)
Zhodnostné zobrazenia
Zhodnostné zobrazenia patria medzi najdôležitejšie geometrické transformácie, pretože zachovávajú vzdialenosti a uhly. Sú základom konštrukčnej geometrie, ale aj praktických aplikácií, ako je technické kreslenie, CAD systémy či počítačová grafika. V tejto kapitole sa pozrieme na to, ako možno zhodnostné zobrazenia vyjadriť analyticky v rámci afinného prístupu. Ukážeme si, že každé zhodnostné zobrazenie je špeciálnym prípadom afinného zobrazenia s dodatočnou vlastnosťou zachovania metriky.
Analytické vyjadrenia zhodnostných zobrazení.
So syntetickým prístupom k zhodnostným zobrazeniam ste sa zoznámili v kurze Planimetria. Euklidovské konštrukcie, v ktorých sa využívajú vlastnosti zhodnostných
zobrazení si môžete zopakovať
Tu.
Definícia (Zhodnostné zobrazenie).
Zobrazenie v euklidovskej rovine budeme nazývať zhodnostné zobrazenie, ak pre každé dva body  a ich obrazy
a ich obrazy , f(Y )") platí
platí
(ZH)f(Y)|") .
.
Inými slovami zhodnostné zobrazenia zachovávajú vzdialenosti bodov.
Zobrazenie
v euklidovskej rovine budeme nazývať zhodnostné zobrazenie, ak pre každé dva body
a ich obrazy platí
(ZH)
.
Inými slovami zhodnostné zobrazenia zachovávajú vzdialenosti bodov.
Ak chceme so zhodnostnými zobrazeniami pracovať ako s afinnými zobrazeniami v  -rozmernom euklidovskom priestore zameraním
-rozmernom euklidovskom priestore zameraním ") , tak musíme najskôr ukázať že platí nasledujúca veta.
, tak musíme najskôr ukázať že platí nasledujúca veta.
-rozmernom euklidovskom priestore zameraním , tak musíme najskôr ukázať že platí nasledujúca veta.
Tvrdenie (Afinnosť zhodnostného zobrazenia).
Každé zhodnostné zobrazenie je afinné.
je afinné.
Každé zhodnostné zobrazenie
je afinné.
Dôkaz.
Treba dokázať, že zhodnostné zobrazenie spĺňa podmienku zachovania kolineárnosti a deliaceho pomeru.
Nech  sú kolineárne body
sú kolineárne body  , potom z predpokladu vyplýva aj body (\small f(A), f(B),f(C) \) sú navzájom rôzne.
Bez ujmy na obecnosti môžeme predpokladať, že pre usporiadanie bodov platí
, potom z predpokladu vyplýva aj body (\small f(A), f(B),f(C) \) sú navzájom rôzne.
Bez ujmy na obecnosti môžeme predpokladať, že pre usporiadanie bodov platí ") . Bod leží medzi bodmi
. Bod leží medzi bodmi  .
.
Ukážeme, že body, f(B),f(C)") sú kolineárne a zároveň platí
sú kolineárne a zároveň platí  = (f(A)f(B)f(C))") .
.
.
.
Treba dokázať, že zhodnostné zobrazenie
spĺňa podmienku zachovania kolineárnosti a deliaceho pomeru.
Nech sú kolineárne body , potom z predpokladu vyplýva aj body (\small f(A), f(B),f(C) \) sú navzájom rôzne.
Bez ujmy na obecnosti môžeme predpokladať, že pre usporiadanie bodov platí . Bod leží medzi bodmi .
Ukážeme, že body
sú kolineárne a zároveň platí .
- Prvú časť tvrdenia dokážeme sporom. Nech body nie sú kolineárne, potom vytvárajú trojuholník a
na základe trojuholníkovej nerovnosti dostaneme spor.
- Teda body ležia na jednej priamke. Pre ich usporiadanie môžu nastať dva prípady, z ktorých iba prípad, keď bod
") leží medzi bodmi
leží medzi bodmi ,f(C)") vyhovuje podmienkam:
vyhovuje podmienkam:
f(C) \right| ,\left| BC \right| =\left| f(B)f(C) \right| ,\left| AB \right| =\left| f(A)f(B) \right|") .
.
.
Nech je euklidovská rovina so súradnicovou sústavou  . V predchádzajúcich kapitolách sme ukázali,
že ľubovoľný bod
. V predchádzajúcich kapitolách sme ukázali,
že ľubovoľný bod  a vektor
a vektor ") sa dá jednoznačne vyjadriť ako lineárna kombinácia repéru resp. bázy
sa dá jednoznačne vyjadriť ako lineárna kombinácia repéru resp. bázy
je euklidovská rovina so súradnicovou sústavou . V predchádzajúcich kapitolách sme ukázali,
že ľubovoľný bod a vektor sa dá jednoznačne vyjadriť ako lineárna kombinácia repéru resp. bázy
Tvrdenie (Analytické vyjadrenie zhodnostného zobrazenia v rovine).
Zhodnostné zobrazenie má maticové analytické vyjadrenie v tvare
má maticové analytické vyjadrenie v tvare
(AZH)
kde=(a,b), f^*(\vec e_2)=(c,d)") sú obrazy súradnicových vektorov v asociovanom zobrazení a je obraz začiatku súradnej sústavy v afinnom zobrazení .
sú obrazy súradnicových vektorov v asociovanom zobrazení a je obraz začiatku súradnej sústavy v afinnom zobrazení .
Zhodnostné zobrazenie
má maticové analytické vyjadrenie v tvare
(AZH)
kde
sú obrazy súradnicových vektorov v asociovanom zobrazení a je obraz začiatku súradnej sústavy v afinnom zobrazení .
Dôkaz.
Nech je v je afinné zobrazenie , v ktorom sa repér  zobrazí na repér
zobrazí na repér  , pričom pre súradnice obrazov platí
, pričom pre súradnice obrazov platí
![\small f(O)=[p,q]](https://lms.umb.sk/filter/tex/pix.php/becf71878d58676246872c15f333ea3e.png "\small f(O)=[p,q]")
=(a,b),\vec e'_2=f^*(\vec e_2)=(c,d)") .
.
Ľubovoľný bod![\small X=[x,y]](https://lms.umb.sk/filter/tex/pix.php/73de29c5f631f256698689adfa339636.png "\small X=[x,y]") euklidovskej roviny sa pomocou súradného repéru
euklidovskej roviny sa pomocou súradného repéru  dá jednoznačne
ako
dá jednoznačne
ako
 .
.
Keďže zobraznie je lineárne, tak pre jobraz ![\small X'=[x',y']](https://lms.umb.sk/filter/tex/pix.php/d1f8feda02518e67820a4bbaa5c0e923.png "\small X'=[x',y']") bude platiť
bude platiť
=f(O)+\normalsize xf^*(\vec e_1)+yf^*(\vec e_2)")
odkiaľ dostávame
![[x',y']=[p,q]+x(a,b)+y(c,d)](https://lms.umb.sk/filter/tex/pix.php/dc59a86c2c55e9dd75a6a784b8577247.png "[x',y']=[p,q]+x(a,b)+y(c,d)") ,
,
čo predstavuje maticový zápis (AZH).
Nech je v
je afinné zobrazenie , v ktorom sa repér
zobrazí na repér , pričom pre súradnice obrazov platí
.
Ľubovoľný bod
euklidovskej roviny sa pomocou súradného repéru dá jednoznačne
ako
.
Keďže zobraznie
je lineárne, tak pre jobraz bude platiť
odkiaľ dostávame
,
čo predstavuje maticový zápis (AZH).
Podmienka
Ak je matica zhodnostného zobrazenia, tak musí platiť

kde je transponovaná matica k matici
je transponovaná matica k matici  a matica
a matica  je jednotková. Zdôvodnenie nájdete v práci (Ptáčková, 2016).
je jednotková. Zdôvodnenie nájdete v práci (Ptáčková, 2016).
Ak
je matica zhodnostného zobrazenia, tak musí platiť
kde
je transponovaná matica k matici a matica je jednotková. Zdôvodnenie nájdete v práci (Ptáčková, 2016).
Matica, ktorá splňuje túto podmienku má tvar
,") kde sú obrazy súradnicových vektorov v asociovanom zobrazení.
kde sú obrazy súradnicových vektorov v asociovanom zobrazení.
Zvoľme , alebo
, alebo  , aby bola splnená rovnosť
, aby bola splnená rovnosť  . Získame dve riešenia. Jedno riešenie je:
. Získame dve riešenia. Jedno riešenie je:

Matica je matica typu:
je matica typu:
 kde
kde  . Matice tohto typu sú matice priamych zhodností.
. Matice tohto typu sú matice priamych zhodností.
Druhým riešením je matica typu: kde , čo predstavuje maticu nepriamej zhodnosti.
kde , čo predstavuje maticu nepriamej zhodnosti.
sú obrazy súradnicových vektorov v asociovanom zobrazení.
Zvoľme
, alebo , aby bola splnená rovnosť . Získame dve riešenia. Jedno riešenie je:
Matica
je matica typu:
kde . Matice tohto typu sú matice priamych zhodností.
Druhým riešením je matica typu:
kde , čo predstavuje maticu nepriamej zhodnosti.
\)
Posunutie
Posunutie  v rovine
v rovine  je jednoznačne určené vektorom posunutia
je jednoznačne určené vektorom posunutia ") .
.
v rovine je jednoznačne určené vektorom posunutia .
Z planimetrie vieme, že posunutie zachováva rovnobežnosť. Keďže posunutie je zhodnostné zobrazenie, tak zachováva aj dĺžku úsečky. Z vlastností rovnobežníka  \tau_u(A)") vieme, že jeho protiľahlé strany sú zhodné a navzájom rovnobežné. Teda platí
vieme, že jeho protiľahlé strany sú zhodné a navzájom rovnobežné. Teda platí
 \right|=\left| \tau _u (A) \tau _u (B) \right|") .
Preto môžeme vysloviť nasledujúcu vetu.
.
Preto môžeme vysloviť nasledujúcu vetu.
zachováva rovnobežnosť. Keďže posunutie je zhodnostné zobrazenie, tak zachováva aj dĺžku úsečky. Z vlastností rovnobežníka vieme, že jeho protiľahlé strany sú zhodné a navzájom rovnobežné. Teda platí
.
Tvrdenie (Obraz bodu v posunutí).
Pre obrazy súradných vektorov
súradných vektorov , \vec e_2=(0,1)") v ľubovoľnom posunutí platí
v ľubovoľnom posunutí platí
(TAU)=\vec e_1") a
a =\vec e_2") .
.
Pre obrazy
súradných vektorov v ľubovoľnom posunutí platí
(TAU)
a .
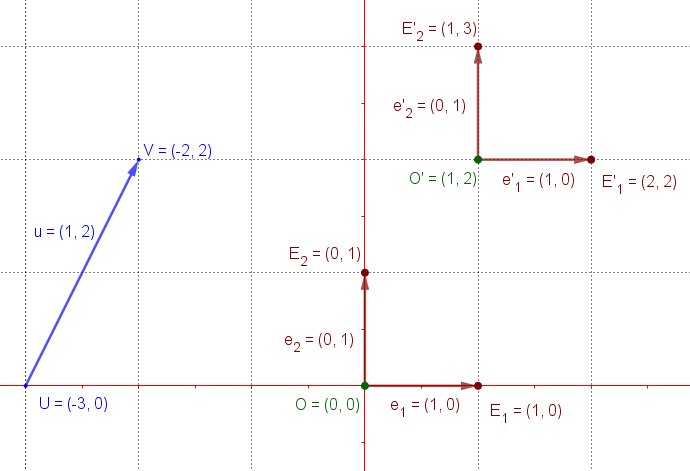
Dôkaz.
Otvorte si dynamický applet Tu, v ktorom môžete premiestňovať vektor a meniť polohu koncového bodu vektora
a meniť polohu koncového bodu vektora  .
.
Z vlastností rovnobežníka ( ) vyplýva, že
) vyplýva, že  .
.
Otvorte si dynamický applet Tu, v ktorom môžete premiestňovať vektor
a meniť polohu koncového bodu vektora .
Z vlastností rovnobežníka (
) vyplýva, že .
Posunutie v rovine je afinné zobrazenie určené vektorom posunutia  , kde
, kde ![\small O'=[p,q], \vec u =(p,q)](https://lms.umb.sk/filter/tex/pix.php/935a5f780f2084c71e7899ad6977cd4f.png "\small O'=[p,q], \vec u =(p,q)") .
Posunutie je analyticky určené rovnicou
.
Posunutie je analyticky určené rovnicou
 (1)
(1)
je afinné zobrazenie určené vektorom posunutia , kde .
Posunutie je analyticky určené rovnicou
(1)
Rovnica (1) predstavuje transformačné rovnice
 .
.
V maticovom tvare
=\left(\begin{array}{ccc} 1&0 \\ 0&1 \end{array}\right)\times \left(\begin{array}{ccc}x \\ y \end{array}\right) + \left(\begin{array}{ccc}p \\ q \end{array}\right)") .
.
.
V maticovom tvare
.
Posunutie v rovine je afinné zobrazenie. Dokážte to.
Príklad.
V rovine je posunutie určené vektorom ") . Určite jeho transformačné rovnice.
. Určite jeho transformačné rovnice.
V rovine
je posunutie určené vektorom . Určite jeho transformačné rovnice.
Riešenie.
Poznáme obraz počiatku súradnej sústavy:![\small O' = [1,2]](https://lms.umb.sk/filter/tex/pix.php/10dcc2e27b46ae55829443bf31127cf3.png "\small O' = [1,2]") a dosadením do vzťahu (1) dostaneme rovnice
a dosadením do vzťahu (1) dostaneme rovnice
 .
.
Poznáme obraz počiatku súradnej sústavy:
a dosadením do vzťahu (1) dostaneme rovnice
.
Úloha.
Vytvorte applet v GeoGebre, ktorý bude generovať transformačné rovnice pre posunutie v rovine.
Vytvorte applet v GeoGebre, ktorý bude generovať transformačné rovnice pre posunutie v rovine.
\)
Osová súmernosť
Osová súmernosť ako afinné zhodnostné zobrazenie.
Z kurzu Planimetria vieme, že osová súmernosť je jednoznačne určená osou súmernosti a dvojicou odpovedajúcich bodov. Ak si zvolíme dva rôzne body na osi súmernosti, tak osovú súmernosť
môžeme jednoznačne určiť dvomi Samodružnými bodmi a jednou dvojicou odpovedajúcich si bodov. Túto vlastnosť neskôr výhodne využijeme pri hľadaní transformačných rovníc osovej súmernosti.
Osová súmernosť - ukážka.
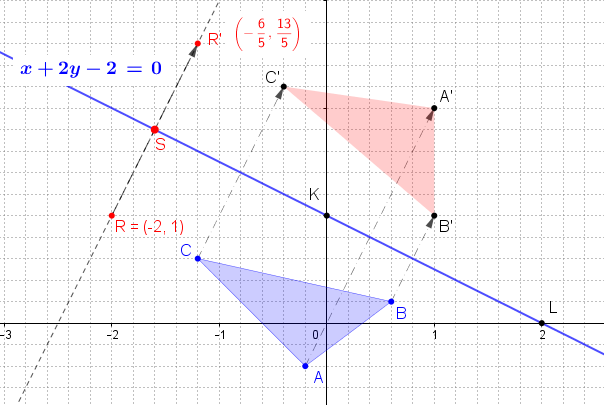
- Na určenie transformačných rovníc osovej súmernosti určenej osou súmernosti
 budeme potrebovať obrazy
troch rôznych bodov a ich obrazy v danej osovej súmernosti.
budeme potrebovať obrazy
troch rôznych bodov a ich obrazy v danej osovej súmernosti.
Najvýhodnejšie bude ak si zvolíme dva rôzne samodružné body a nejaký tretí bod tak, aby všetky tri boli nekolineárne. Takými bodmi pri takto danej osi súmernosti sú napríklad- Dva body na osi súmernosti
 , pre ktoré platí
, pre ktoré platí ![\small A=[0,\frac{-c}{b}]](https://lms.umb.sk/filter/tex/pix.php/dd67a08dcc145362b583cb2c84e94ce1.png "\small A=[0,\frac{-c}{b}]") a
a ![\small B=[\frac{-c}{a},0]](https://lms.umb.sk/filter/tex/pix.php/b35dafcb91a2f8e7f3b1e89aeb667a55.png "\small B=[\frac{-c}{a},0]") ,
prípad ak jeden z koeficientov
,
prípad ak jeden z koeficientov  je rovný nule sa rieši zvlášť. bodu
je rovný nule sa rieši zvlášť. bodu
- Tretí bod nech je počiatok súradnej sústavy . Súradnice
 jeho obrazu
jeho obrazu ![\small O'=[p,q]](https://lms.umb.sk/filter/tex/pix.php/7843bc3154f974357ba963a4d076a5bc.png "\small O'=[p,q]") určíme napríklad pomocou bodu
určíme napríklad pomocou bodu ![\small X_0[x_0,y_0]](https://lms.umb.sk/filter/tex/pix.php/1ce455917dd1618d7f5c9cad022a096b.png "\small X_0[x_0,y_0]") .
Tento bod je spoločným bodom danej priamky
.
Tento bod je spoločným bodom danej priamky  a kolmice
a kolmice  . Pre jeho súradnice platí:
. Pre jeho súradnice platí:
 .
Vektor
.
Vektor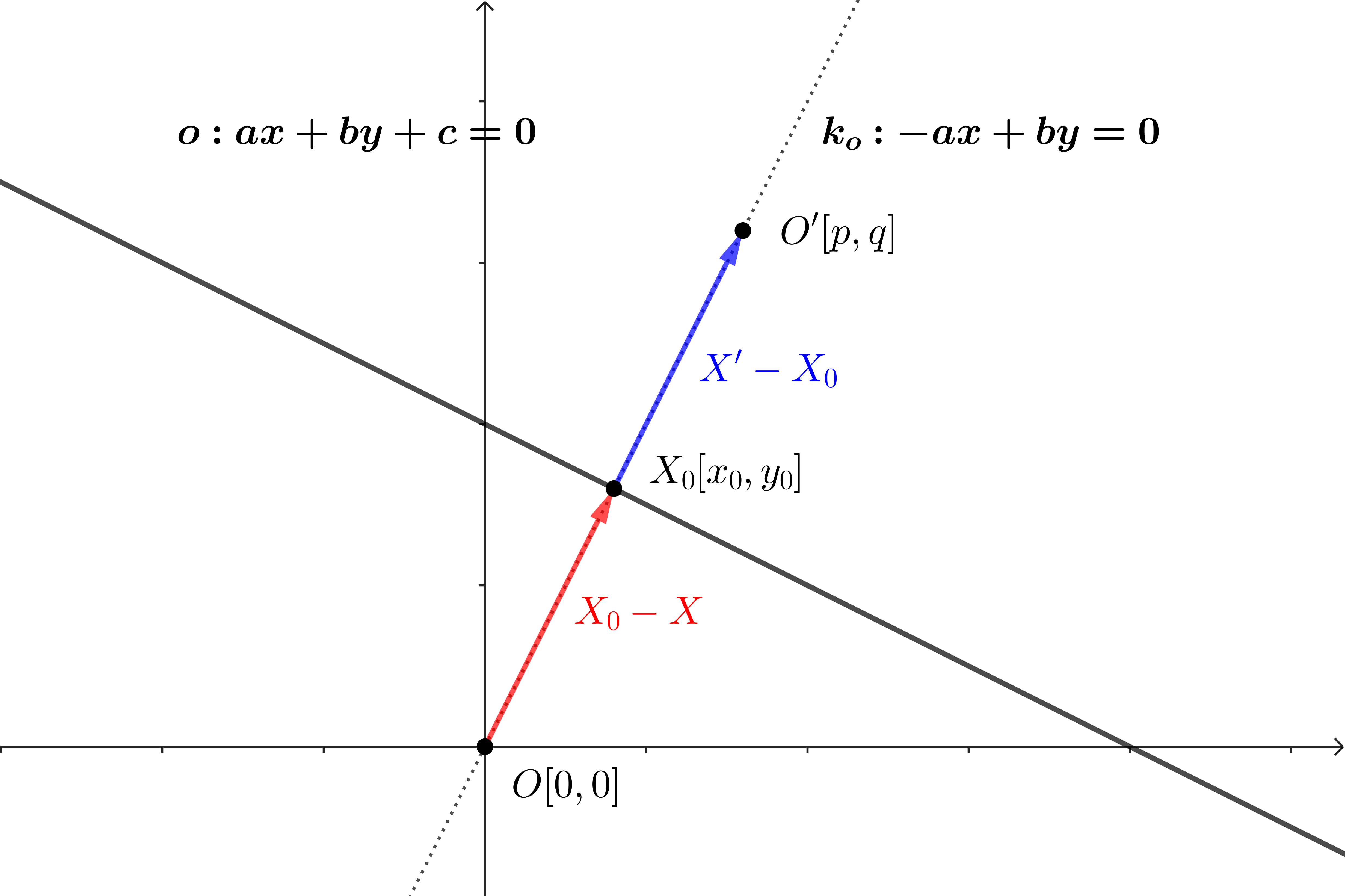
Obraz počiatku súradnej sústavy v osovej súmernosti. je
je  násobkom vektora
násobkom vektora  . Odkiaľ dostávame súradnice obrazu počiatku v osovej súmernosti:
. Odkiaľ dostávame súradnice obrazu počiatku v osovej súmernosti:
 .
.
- Dva body na osi súmernosti
- Potom dosadíme súradnice obrazov
![\small O'=[p,q],A=A'=[0,\frac{-c}{b}],B=B'=[\frac{-c}{a},0]](https://lms.umb.sk/filter/tex/pix.php/688ea304ba4f8441ab50a3012a5b3f1b.png "\small O'=[p,q],A=A'=[0,\frac{-c}{b}],B=B'=[\frac{-c}{a},0]") do vzťahov
do vzťahov
 pričom musí platiť
pričom musí platiť
 .
.
Dostaneme maticovú rovnicu v tvare . (pozrite tiež príklad "
Tri body"
v kapitole Afinné zobrazenie) a využitím
Matrix calculator dostaneme
. (pozrite tiež príklad "
Tri body"
v kapitole Afinné zobrazenie) a využitím
Matrix calculator dostaneme
") .
.") =
=,")
odkiaľ už ľahko určíme hľadané transformačné rovnice.
Tvrdenie (Obraz bodu v osovej súmernosti ") ).
).
Transformačné rovnice pre osovú súmernosť určenú osou súmernosti:
(OS) x\;-\;\;\left( \frac{2ab}{a^2+b^2} \right) y-\frac{2ac}{a^2+b^2} , \\
y'=\left(-\frac{2ab}{a^2+b^2} \right) x\;\;\;+\left( \frac{a^2-b^2}{a^2+b^2} \right)y-\frac{2bc}{a^2+b^2}
\end{array}.")
).Transformačné rovnice pre osovú súmernosť určenú osou súmernosti
:
(OS)
Cvičenie.
Určte analytické vyjadrenie osovej súmernosti určenej osou , ktorá je určená rovnicou
, ktorá je určená rovnicou  .
.
Určte analytické vyjadrenie osovej súmernosti určenej osou
, ktorá je určená rovnicou .
Riešenie.
Po určení![\small O'=[\frac{4}{5},\frac{8}{5}]](https://lms.umb.sk/filter/tex/pix.php/fe03ff2bb6915ea8b5b1fb9e7570b908.png "\small O'=[\frac{4}{5},\frac{8}{5}]") a priesečníkov so súradnými osami
a priesečníkov so súradnými osami ![\small A'=[0,1],B'=[2,0]](https://lms.umb.sk/filter/tex/pix.php/7b5de48e251f867c8cf2cc5ec11ca438.png "\small A'=[0,1],B'=[2,0]") a dostaneme pre maticu vzorov
a maticu obrazov
a dostaneme pre maticu vzorov
a maticu obrazov
") ;
;
") ;
;
")
odkiaľ

\times \left(\begin{matrix}
0 & 1 & 0 \\
\frac{1}{2} & 0 & 0 \\
\frac{-1}{2} & -1 & 1
\end{matrix}\right)=
\left(\begin{matrix}
\frac{3}{5} & \frac{-4}{5} & \frac{4}{5} \\
\frac{-4}{5} & \frac{-3}{5} & \frac{8}{5} \\
0 & 0 & 1
\end{matrix}\right),")
čo predstavuje transformačné rovnice pre skúmanú osovú súmernosť
 .
.
Po určení
a priesečníkov so súradnými osami a dostaneme pre maticu vzorov
a maticu obrazov
;
;
odkiaľ
čo predstavuje transformačné rovnice pre skúmanú osovú súmernosť
.
Osová súmernosť je oproti ostatným zhodným zobrazeniam niečím výnimočná. Má zaujímavú vlastnosť, skladaním osových súmerností sa dajú získať
všetky zhodné zobrazenia v rovine.
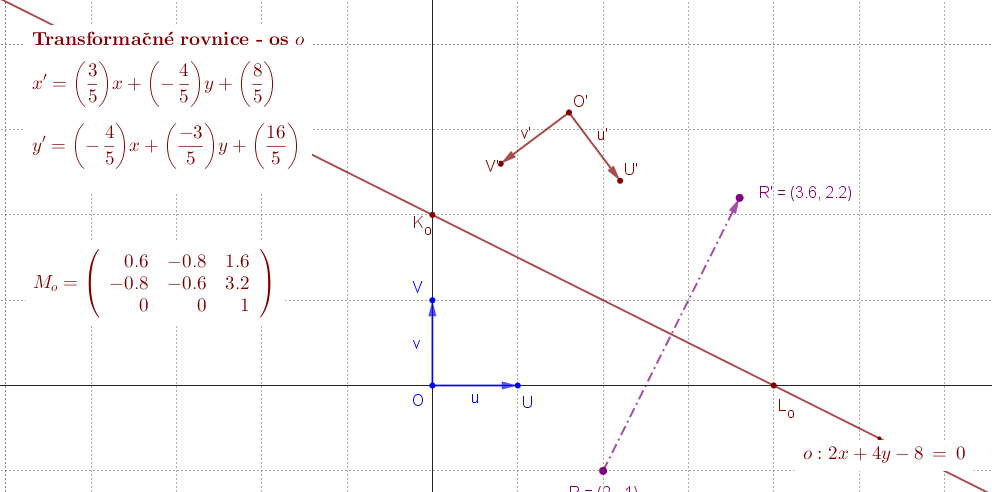
V applete "Skladanie osových súmerností" sú osi súmerností navzájom kolmé. Preto ich zložením bude stredová súmernosť so stredom  . Matica
zloženého zobrazenia
. Matica
zloženého zobrazenia  je súčinom transformačnej matice osovej súmernosti
je súčinom transformačnej matice osovej súmernosti  a transformačnej matice osovej súmernosti
a transformačnej matice osovej súmernosti
 .
.
Ak označíme súradnice stredu ako
ako ![\small S=[s_1,s_2]](https://lms.umb.sk/filter/tex/pix.php/5306fb95c5a732b58ea54862d8e783bf.png "\small S=[s_1,s_2]") , tak rozšírená matica stredovej súmernosti bude mať tvar
, tak rozšírená matica stredovej súmernosti bude mať tvar
,") kde
kde  sú súradnice obrazu počiatku v skúmanej stredovej súmernosti. V nasledujúcej kapitole dokážeme túto vlastnosť pomocou skladania posunutia a stredovej súmernosti so stredom v pčiatku súradnej sústavy.
sú súradnice obrazu počiatku v skúmanej stredovej súmernosti. V nasledujúcej kapitole dokážeme túto vlastnosť pomocou skladania posunutia a stredovej súmernosti so stredom v pčiatku súradnej sústavy.
Presvedčte sa že hodnoty sa nemenia pri zmene polohy osí súmerností za predpokladu, že kolmosť je invariantná voči zmene polohy. Nastavte osi súmernosti tak, aby
sa nemenia pri zmene polohy osí súmerností za predpokladu, že kolmosť je invariantná voči zmene polohy. Nastavte osi súmernosti tak, aby  .
.
. Matica
zloženého zobrazenia je súčinom transformačnej matice osovej súmernosti a transformačnej matice osovej súmernosti
.
Ak označíme súradnice stredu
ako , tak rozšírená matica stredovej súmernosti bude mať tvar
sú súradnice obrazu počiatku v skúmanej stredovej súmernosti. V nasledujúcej kapitole dokážeme túto vlastnosť pomocou skladania posunutia a stredovej súmernosti so stredom v pčiatku súradnej sústavy.Presvedčte sa že hodnoty
sa nemenia pri zmene polohy osí súmerností za predpokladu, že kolmosť je invariantná voči zmene polohy. Nastavte osi súmernosti tak, aby .
\)
Stredová súmernosť
Stredová súmernosť  v rovine je jednoznačne určené stredom súmernosti .
v rovine je jednoznačne určené stredom súmernosti .
v rovine je jednoznačne určené stredom súmernosti .
Konštrukciu obrazu ľubovoľného bodu  v stredovej súmernosti môžeme zhrnúť do dvoch krokov:
v stredovej súmernosti môžeme zhrnúť do dvoch krokov:
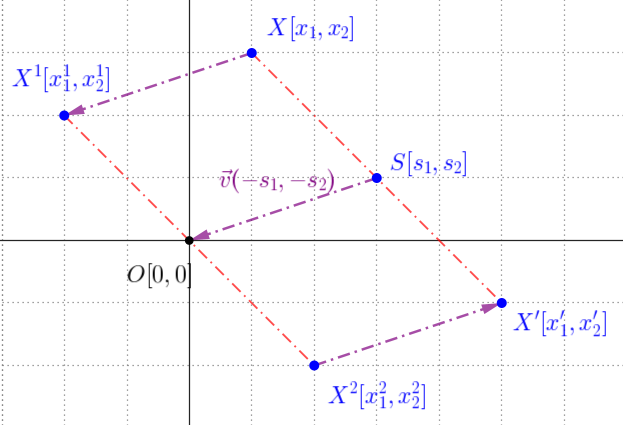 Posunutie
Posunutie  o vektor
o vektor ") je určené maticou
je určené maticou
") .
.
Stredová súmernosť![\small \varrho_{S[0,0]}](https://lms.umb.sk/filter/tex/pix.php/533648fbd418b352f6ae06bfc6c62e76.png "\small \varrho_{S[0,0]}") je daná maticou
je daná maticou
") .
.
Zrejme posunutie o vektor
o vektor ") je určené maticou
je určené maticou
") .
.
Stredová súmernosť ako zložené zobrazenie je dané súčinom matíc

\circ
\left( \begin{array}{ccc}
1 &0 &0\\
0 &-1 &0\\
0 & 0 &-1
\end{array} \right)
\circ.
\left( \begin{array}{ccc}
1 &0 &0\\
-s_1 &1 &0\\
-s_2 & 0 &1
\end{array} \right)") .
.
Postupným prenásobením dostaneme

\circ
\left( \begin{array}{ccc}
1 &0 &0\\
-s_1 &1 &0\\
-s_2 & 0 &1
\end{array} \right)=
\left( \begin{array}{ccc}
1 &0 &0\\
2s_1 &-1 &0\\
2s_2 & 0 &-1
\end{array} \right)") .
.
v stredovej súmernosti môžeme zhrnúť do dvoch krokov:
- obrazom bodu je bod ,
- obrazom bodu
 je bod , pre ktorý platí, že bod
je bod , pre ktorý platí, že bod  je stredom úsečky
je stredom úsečky  .
.
- posunutia o vektor
") ,
, - stredovej súmernosti ,
- posunutia
 o vektor
o vektor ") .
.
o vektor je určené maticou
.
Stredová súmernosť
je daná maticou
.
Zrejme posunutie
o vektor je určené maticou
.
Stredová súmernosť ako zložené zobrazenie je dané súčinom matíc
.
Postupným prenásobením dostaneme
.
Tvrdenie (Analytické vyjadrenie stredovej súmernosti).
Pre obraz bodu![\small X=[x,y]](https://lms.umb.sk/filter/tex/pix.php/ca00c84e07e31fb6c3a60dbdd6b04183.png "\small X=[x,y]") v stredovej súmernosti platí
v stredovej súmernosti platí
(SS)=
\left( \begin{array}{ccc}
1 &0 &0\\
2s_1 &-1 &0\\
2s_2 & 0 &-1
\end{array} \right)
\circ
\left( \begin{array}{ccc}
1 \\
x\\y
\end{array} \right)=
\left( \begin{array}{ccc}
1\\
2s_1 -x\\
2s_2 -y
\end{array} \right)") .
.
Pre obraz bodu
v stredovej súmernosti platí
(SS)
.
Poznámka - k rozšíreným maticiam.
V tejto kapitole sme použili inú formu zápisu rozšírených matíc. V tomto zápise sa "pomocný riadok" ") zapisuje ako prvý riadok rozšírenej matice. Operácie s maticami zostávajú nezmenené. V pôvodnom označení by sme predchádzajúce tvrdenie zapísali ako
zapisuje ako prvý riadok rozšírenej matice. Operácie s maticami zostávajú nezmenené. V pôvodnom označení by sme predchádzajúce tvrdenie zapísali ako
=
\left( \begin{array}{ccc}
-1 & 0 &2s_1 \\
0 &-1 &2s_2 \\
0 & 0 &1
\end{array} \right)
\circ
\left( \begin{array}{ccc}
x\\
y\\
1
\end{array} \right)=
\left( \begin{array}{ccc}
-x+2s_1 \\
-y+2s_2\\
1
\end{array} \right)") .
.
zapisuje ako prvý riadok rozšírenej matice. Operácie s maticami zostávajú nezmenené. V pôvodnom označení by sme predchádzajúce tvrdenie zapísali ako
.
\)
Otáčanie
Definícia (Otáčanie).
Nech je daný bod, uhol  (veľkosť uhla je nanajvýš 360°) a orientácia kladná (proti smeru hodinových ručičiek)
resp. záporná (v smeru hodinových ručičiek). Zobrazenie, pre ktoré platí:
(veľkosť uhla je nanajvýš 360°) a orientácia kladná (proti smeru hodinových ručičiek)
resp. záporná (v smeru hodinových ručičiek). Zobrazenie, pre ktoré platí:
Nech je daný bod
, uhol (veľkosť uhla je nanajvýš 360°) a orientácia kladná (proti smeru hodinových ručičiek)
resp. záporná (v smeru hodinových ručičiek). Zobrazenie, pre ktoré platí:
- obrazom bodu je bod ,
- obrazom bodu je bod
 , ktorý leží na kružnici
, ktorý leží na kružnici ") a zároveň uhol
a zároveň uhol  je zhodný s uhlom
je zhodný s uhlom  , pričom orientácia je kladná, resp. záporná, sa nazýva otočenie ,
, pričom orientácia je kladná, resp. záporná, sa nazýva otočenie , - Bod sa nazýva stred otočenia. Otočenie so stredom a uhlom a kladnou resp. zápornou orientáciou
budeme označovať
 .
.
Z planimetrie vieme, že otáčanie je zhodnostné zobrazenie, preto zachováva dĺžku úsečky. Otáčanie je afinné zobrazenie určené stredom otáčania a uhlom otáčania.
Otáčanie  so stredom
so stredom ![\small S\left[0,0 \right]](https://lms.umb.sk/filter/tex/pix.php/5dd9bf145cf35a7f935af843f5331bec.png "\small S\left[0,0 \right]") zobrazuje
zobrazuje
so stredom zobrazuje
bod ![\small A\left[x,y \right]](https://lms.umb.sk/filter/tex/pix.php/24549499f0818bd56df20f744e0f4807.png "\small A\left[x,y \right]") do bodu
do bodu ![\small A' \left[\left(x .\cos \; \alpha-y.\sin \; \alpha \right) , \left( x.\cos \; \alpha+y.\sin \; \alpha \right) \right]](https://lms.umb.sk/filter/tex/pix.php/7d0bbb96bd50fb133dc3f151eccf6da6.png "\small A' \left[\left(x .\cos \; \alpha-y.\sin \; \alpha \right) , \left( x.\cos \; \alpha+y.\sin \; \alpha \right) \right]")
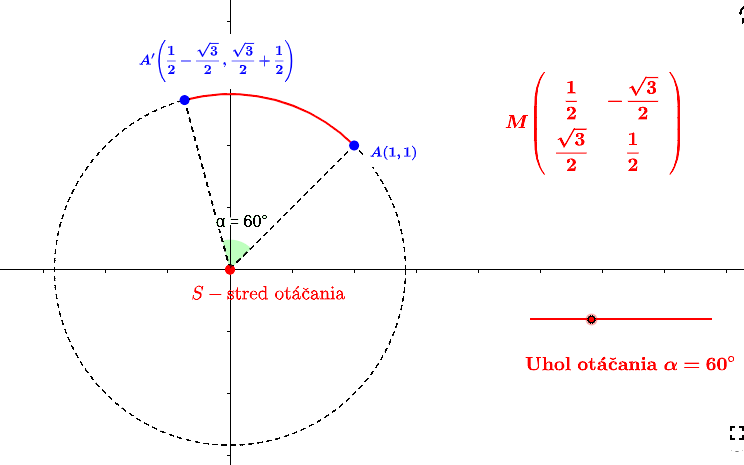
Otvorte si applet Tu.
do bodu
Otvorte si applet Tu.
Tvrdenie (Transformačné rovnice otáčania okolo počiatku).
Analytické vyjadrenie otáčania so stredom a uhlom  má maticový tvar
má maticový tvar
(RO)=\left( \begin{array}{} \cos \alpha & -\sin α \\ \sin α & \cos α \\ \end{array} \right)\times \left(\begin{array}{ccc}x \\ y \end{array}\right),")
kde je uhol otočenia a
je uhol otočenia a  je celé číslo.
je celé číslo.
Analytické vyjadrenie otáčania so stredom
a uhlom má maticový tvar
(RO)
kde
je uhol otočenia a je celé číslo.
Dôkaz.
Využitím polárnych súradníc a aplikáciou súčtových vzorcov pre funkcie sínus a kosínus, ľahko dokážeme toto tvrdenie. Otvorte si prezentáciu Tu, ktorá prezentuje takýto dôkaz.
Využitím polárnych súradníc a aplikáciou súčtových vzorcov pre funkcie sínus a kosínus, ľahko dokážeme toto tvrdenie. Otvorte si prezentáciu Tu, ktorá prezentuje takýto dôkaz.
V predchádzajúcej kapitole sme stredovú súmernosť vyjadrili ako zložené zobrazenie z troch zobrazení, ktorých transformačné rovnice poznáme resp. ktoré sa ľahko odvodia. Boli to zobrazenia:
![\small S\left[s_1,s_2 \right]](https://lms.umb.sk/filter/tex/pix.php/e39c1956f3b144ca2eea43e4daf04619.png "\small S\left[s_1,s_2 \right]") . Potom dostaneme
. Potom dostaneme
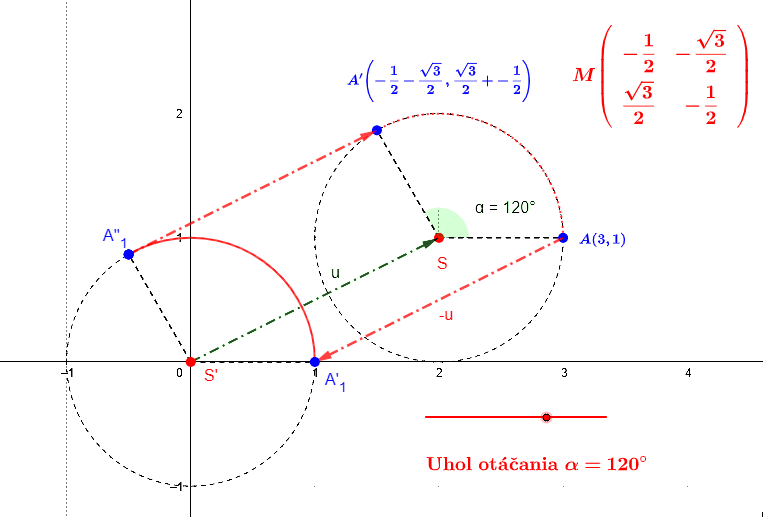 1. posunutie
1. posunutie  o vektor
o vektor ") určené maticou
určené maticou
") .
.
2. otáčanie so stredom dané maticou
 & -\sin\left(\alpha\right) & 0 \\
\sin\left(\alpha\right) & \cos\left(\alpha\right) & 0 \\
0 & 0 & 1
\end{matrix}\right)") .
.
3. a posunutie o vektor
o vektor ") určené maticou
určené maticou
") .
.
Otáčanie ako zložené zobrazenie je dané súčinom matíc v danom poradí. Ich postupným vynásobením dostaneme transformačnú maticu otáčania so stredom:
 & -\sin\left(\alpha\right) & s_1-s_1\cos\left(\alpha\right)+s_2\sin\left(\alpha\right) \\
\sin\left(\alpha\right) & \cos\left(\alpha\right) & s_2-s_2\cos\left(\alpha\right)-s_1\sin\left(\alpha\right) \\
0 & 0 & 1
\end{matrix}\right)") .
.
Na základe vyššie popísaných vlastností zložených zobrazení môžeme vysloviť tvrdenie, ktoré popisuje transformačné rovnice otáčania so stredom a uhlom
so stredom a uhlom  .
.
- posunutia o vektor ,
- stredovej súmernosti ,
- posunutia o vektor .
. Potom dostaneme
o vektor určené maticou
.
2. otáčanie
so stredom dané maticou
.
3. a posunutie
o vektor určené maticou
.
Otáčanie ako zložené zobrazenie je dané súčinom matíc v danom poradí. Ich postupným vynásobením dostaneme transformačnú maticu otáčania so stredom
:.
Na základe vyššie popísaných vlastností zložených zobrazení môžeme vysloviť tvrdenie, ktoré popisuje transformačné rovnice otáčania
so stredom a uhlom .
Tvrdenie (Transformačné rovnice otáčania okolo stredu ).
Analytické vyjadrenie otáčania so stredom a uhlom má maticový tvar
(ROT)=
\left(\begin{matrix}
\cos\left(\alpha\right) & -\sin\left(\alpha\right) & s_1-s_1\cos\left(\alpha\right)+s_2\sin\left(\alpha\right) \\
\sin\left(\alpha\right) & \cos\left(\alpha\right) & s_2-s_2\cos\left(\alpha\right)-s_1\sin\left(\alpha\right) \\
0 & 0 & 1
\end{matrix}\right) \times
\left(\begin{matrix} x \\ y \\ 1 \end{matrix}\right),")
kde je uhol otočenia a je celé číslo.
).
Analytické vyjadrenie otáčania so stredom
a uhlom má maticový tvar
(ROT)
kde
je uhol otočenia a je celé číslo.
Poznámka.
Niekedy sa všeobecné transformačné rovnice otočenia uvádzajú v upravenej podobe:
\cos\alpha - (y - s_2)\sin\alpha +s_1")
\sin\alpha + (y - s_2)\cos\alpha+s_2")
Niekedy sa všeobecné transformačné rovnice otočenia uvádzajú v upravenej podobe:
Príklad.
V rovine je otočenie určené stredom![\small S = [−1; 1]](https://lms.umb.sk/filter/tex/pix.php/29133975b65446dd0b21e48795ced112.png "\small S = [−1; 1]") a o orientovaným uhlom
a o orientovaným uhlom  . Určite jeho transformačné rovnice a obraz kružnice
. Určite jeho transformačné rovnice a obraz kružnice
^2 + (y − 2)^2 = 9") .
.
V rovine je otočenie určené stredom
a o orientovaným uhlom . Určite jeho transformačné rovnice a obraz kružnice
.
Riešenie.
Otočenie v rovine so stredom a uhlom má transformačné rovnice:
\cos(-60°) - (y- 1)\sin(-60°)-1 = \frac{1}{2}(x + 1) + \frac{\sqrt{3}}{2}(y - 1)-1= \frac{1}{2}x + \frac{\sqrt{3}}{2}y - \frac{\sqrt{3}}{2} - \frac{1}{2}")
\sin(−60°) + (y -1)\cos(−60°) +1=-\frac{\sqrt{3}}{2}x + \frac{1}{2}y + \frac{1}{2} - \frac{\sqrt{3}}{2}") .
.
![\small [-2,2]](https://lms.umb.sk/filter/tex/pix.php/cea5e9aa96e20deb533d9d4b74e69012.png "\small [-2,2]") , ktoré dosadíme do transformačných rovníc
, ktoré dosadíme do transformačných rovníc
\frac{1}{2} +(2-1) \frac{-\sqrt{3}}{2}-1 = -\frac{3}{2} + \frac{\sqrt{3}}{2},")
\frac{-\sqrt{3}}{2}(-1) + (2-1) \frac{1}{2}(1) = \frac{3}{2} + \frac{\sqrt{3}}{2}.")
Obrazom kružnice je kružnica a jej rovnica má tvar:
^2+\left(y-\frac{3}{2} - \frac{\sqrt{3}}{2} \right )^2=9") .
\)
.
\)
Otočenie v rovine so stredom
a uhlom má transformačné rovnice:
.
- Riešenie pomocou parametrických rovníc kružnice. Na určenie obrazu kružnice
- Riešenie pomocou vlastnosti zhodného zobrazenia:
"Stred danej kružnice (vzoru) sa zobrazí do stredu hľadanej kružnice (obrazu) a polomer sa nezmení."
^2 + (y - 2)^2 = 9") potrebujeme jej parametrické vyjadrenie v tvare
potrebujeme jej parametrické vyjadrenie v tvare
 - 2")
 + 2") ,
,
kde
![\small t \in [0, 2\pi]](https://lms.umb.sk/filter/tex/pix.php/7a8558b7e45812ba4cfac008954a8260.png "\small t \in [0, 2\pi]") . Tieto hodnoty dosadíme do transformačných rovníc otáčania. Podrobnejší výpočet, ktorý bol spracovaný v súčinnosti s úmelou inteligenciou nájdete
Tu.
, ktoré dosadíme do transformačných rovníc
. Tieto hodnoty dosadíme do transformačných rovníc otáčania. Podrobnejší výpočet, ktorý bol spracovaný v súčinnosti s úmelou inteligenciou nájdete
Tu.
, ktoré dosadíme do transformačných rovníc
Obrazom kružnice je kružnica a jej rovnica má tvar:
.
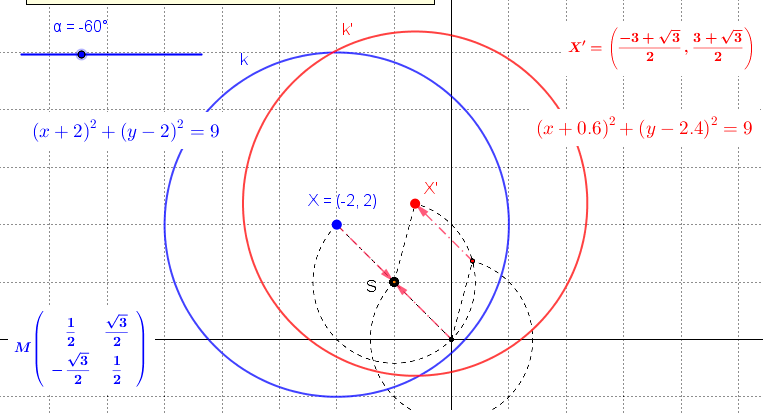 \)
\)
Vzor a obraz
Nech je dané afinné zobrazenie , v ktorom sa súradný repér zobrazí na repér ![\small \mathcal R' = \left \langle O'=[p,q]; \vec e'_1=(a,b), \vec e'_2=(c,d) \right\rangle](https://lms.umb.sk/filter/tex/pix.php/bbee57eaf7851a8e2fb2226506204732.png "\small \mathcal R' = \left \langle O'=[p,q]; \vec e'_1=(a,b), \vec e'_2=(c,d) \right\rangle") .
.
=\left(\begin{array}{ccc} a&c \\ b&d \end{array}\right)\times \left(\begin{array}{ccc}x \\ y \end{array}\right) + \left(\begin{array}{ccc}p \\ q \end{array}\right)") .
.
V tejto kapitole sa budeme zaoberať
, v ktorom sa súradný repér zobrazí na repér .
.- obrazom bodu v afinnom zobrazení
- hľadaním vzoru k obrazu bodu
- obrazom priamky v afinnom zobrazení
- obrazom ľubovoľného geometrického útvaru v afinnom zobrazení
Poznámky.
Obraz bodu, priamky, geometrického rovinného útvaru v zhodnostnom afinnom zobrazení.
Obraz bodu, priamky, geometrického rovinného útvaru v zhodnostnom afinnom zobrazení.
- Obraz ľubovoľného bodu
") v afinnom zobrazení určíme jednoducho tak, že súradnice tohto bodu dosadíme do transformačných rovníc.
Dostaneme rovnosti
v afinnom zobrazení určíme jednoducho tak, že súradnice tohto bodu dosadíme do transformačných rovníc.
Dostaneme rovnosti  , pričom čísla
, pričom čísla  predstavujú súradnice bodu
predstavujú súradnice bodu  . Pozri tvrdenie
Analytické vyjadrenie
zhodnostného zobrazenia v rovine.
. Pozri tvrdenie
Analytické vyjadrenie
zhodnostného zobrazenia v rovine. - Nájsť vzor k danému obrazu
") v afinnom zobrazení určíme tak, že súradnice obrazu bodu
dosadíme do transformačných rovníc za premenné . Dostaneme sústavu dvoch rovních o neznámych
v afinnom zobrazení určíme tak, že súradnice obrazu bodu
dosadíme do transformačných rovníc za premenné . Dostaneme sústavu dvoch rovních o neznámych  .
Riešenie tejto súsatavy predstavuje súradnice hľadaného vzoru.
.
Riešenie tejto súsatavy predstavuje súradnice hľadaného vzoru. - Určiť obraz priamky
 v afinnom zobrazení znamená určiť rovnicu priamky
v afinnom zobrazení znamená určiť rovnicu priamky  . To môžeme urobiť dvoma spôsobmi.
. To môžeme urobiť dvoma spôsobmi.
- Ak priamka je určená dvomi rôznymi bodmi , tak súradnice bodov dosadíme do transformačných rovníc
afinného zobrazenia. Výpočtom popísanom v predchádzajúcom odseku určíme súradnice bodov , ktorými bude určená priamka
 .
Potom určíme napríklad parametrické rovnice priamky .
.
Potom určíme napríklad parametrické rovnice priamky . - Ak priamka je určená rovnicou (napr. vo všeobecnom tvare
 ), tak do transformačných rovníc
), tak do transformačných rovníc
 dosadíme za premenné
súradnice všeobecného bodu priamky. Tento bod určíme pomocou parametra v tvare
dosadíme za premenné
súradnice všeobecného bodu priamky. Tento bod určíme pomocou parametra v tvare ![\small P[t,- \frac{at+c}{b}]](https://lms.umb.sk/filter/tex/pix.php/29afefab61a72fec5c2f84dc7dc259dc.png "\small P[t,- \frac{at+c}{b}]") .
(V prípade. že
.
(V prípade. že  zvolíme parameter
zvolíme parameter  ). Po dosadení dostaneme parametrické
rovnice obrazu priamky
). Po dosadení dostaneme parametrické
rovnice obrazu priamky
 +p;\; y' = bt + d(- \frac{a_pt+c_p}{b_p}) + q}") .
.
- Ak priamka
- Obraz ľubovoľného útvaru
 v afinnom zobrazení určíme, že nájdeme súradnice obrazov charakteristických bodov daného útvaru. Z vlastností
zhodných zobrazení a z vlastnosti afinných zobrazení - lineárnosť a zachovanie deliaceho pomeru vyplýva, že obraz útvaru bude určený obrazov charakteristických bodov
daného útvaru. Napríklad pre
v afinnom zobrazení určíme, že nájdeme súradnice obrazov charakteristických bodov daného útvaru. Z vlastností
zhodných zobrazení a z vlastnosti afinných zobrazení - lineárnosť a zachovanie deliaceho pomeru vyplýva, že obraz útvaru bude určený obrazov charakteristických bodov
daného útvaru. Napríklad pre
- Trojuholník - stačí nájsť obrazy jeho vrcholov.
- Kružnicu stačí nájsť obraz stredu, polomer sa zachová. Pozrite si riešený príklad v predchádzajúcej kapitole.
- Euklidovské útvary platí, že sú konštruovateľné pomocou pravítka(priamky) a kružidla(kružnice). Pre tieto útvary vieme nájsť obrazy tak, že "prenieme" aj euklidovskú konštrukciu útvaru.
- Neeuklidovské útvary možno použiť parametrizáciu týchto útvarov. Takto postupoval Pierre de Fermat, ktorý napríklad analyzoval parabolu cez rovnicu
 . Tým prepojil
parabolu s kvadratickou rovnicou a skúmal jej vlastnosti, ako sú symetria, vrchol či dotykové body s priamkami.
. Tým prepojil
parabolu s kvadratickou rovnicou a skúmal jej vlastnosti, ako sú symetria, vrchol či dotykové body s priamkami.
- V súčasnosti pri hľadaní obraz geometrického útvaru významne uľahčuje prácu vhodný softvér. Napríklad GeoGebra má nástroj "Množina bodov", pomocou ktorého ľahko nájdeme
obraz rovinného geometrického útvaru. Túto metódu sme popísali pri riešení obrazu kružnice v hyperbolickej rotácii (ide o afinné zobrazenie), ktorá má transformačné
rovnice
 . Na (modrej) kružnici sme si zvolili pohyblivý bod a určili sme jeho obraz
. Na (modrej) kružnici sme si zvolili pohyblivý bod a určili sme jeho obraz  . Potom sme aktivovali
nástroj "Množina bodov" a klikli sme najskôr na bod a potom na . Program automaticky vykreslil (červenú) elipsu.
. Potom sme aktivovali
nástroj "Množina bodov" a klikli sme najskôr na bod a potom na . Program automaticky vykreslil (červenú) elipsu.
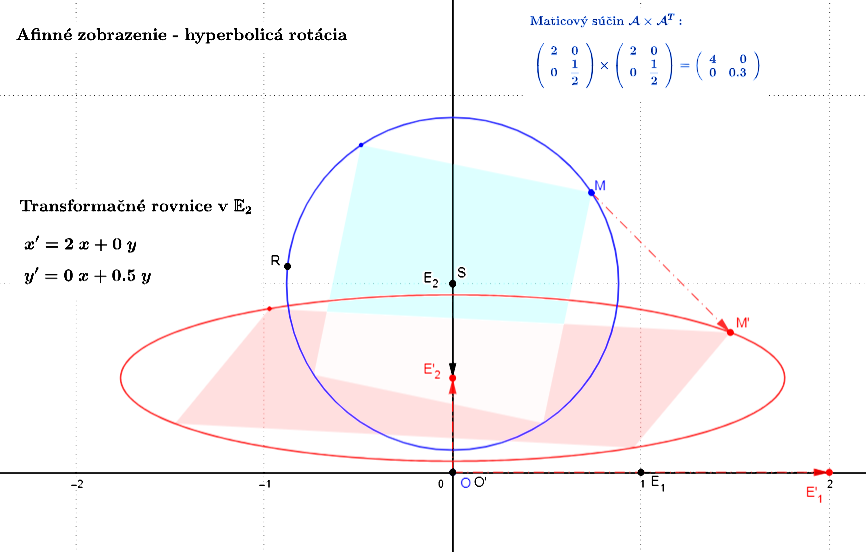
Príklad (Obraz bodu).
Dané je afinné zobrazenie obrazom repéra![\small \mathcal R' = \left \langle O'=[ \frac{-1-\sqrt{3}}{2} , \frac{-1+\sqrt{3}}{2}]; \vec e'_1=( \frac{1}{2},-\frac{\sqrt{3}}{2} ), \vec e'_2=(\frac{\sqrt{3}}{2},\frac{1}{2}) \right\rangle](https://lms.umb.sk/filter/tex/pix.php/e2cdc039ed14408daf8c2b2514abac14.png "\small \mathcal R' = \left \langle O'=[ \frac{-1-\sqrt{3}}{2} , \frac{-1+\sqrt{3}}{2}]; \vec e'_1=( \frac{1}{2},-\frac{\sqrt{3}}{2} ), \vec e'_2=(\frac{\sqrt{3}}{2},\frac{1}{2}) \right\rangle") . Určite obraz bodov
. Určite obraz bodov ![\small [-1,1], [-1,-1]](https://lms.umb.sk/filter/tex/pix.php/53e28ab8a315deb4586b9442a406b896.png "\small [-1,1], [-1,-1]") .
.
Dané je afinné zobrazenie obrazom repéra
. Určite obraz bodov .
![\small [-1,1]](https://lms.umb.sk/filter/tex/pix.php/c0b0c9cea429ed1994542f478aba8817.png "\small [-1,1]")
Príklad (Hľadanie vzoru k obrazu bodu).
Dané je afinné zobrazenie transformačnými rovnicami
.
Ktoré body sa zobrazia do bodov [9, 8] a [−6, 1]?
Dané je afinné zobrazenie transformačnými rovnicami
.
Ktoré body sa zobrazia do bodov [9, 8] a [−6, 1]?
Riešenie
Súradnice bodu [9, 8] dosadíme do transformačných rovníc za premenné. Riešením je dvojica . Otvorte si applet na riešenie rovníc Tu.
Súradnice bodu [9, 8] dosadíme do transformačných rovníc za premenné
. Riešením je dvojica . Otvorte si applet na riešenie rovníc Tu.
Príklad (Obraz priamky).
Dané je afinné zobrazenie obrazom repéra![\small \mathcal R' = \left \langle O'=[ -2 , 2]; \vec e'_1=(2,1), \vec e'_2=(-1,1) \right\rangle](https://lms.umb.sk/filter/tex/pix.php/31f70cf40d8c1a8eebff87571542c457.png "\small \mathcal R' = \left \langle O'=[ -2 , 2]; \vec e'_1=(2,1), \vec e'_2=(-1,1) \right\rangle") . Určite obraz priamky
. Určite obraz priamky  a priamky
a priamky  .
.
Dané je afinné zobrazenie obrazom repéra
. Určite obraz priamky a priamky .
Riešenie
Analytické riešenie: Transformačné rovnice sú

Analytické riešenie: Transformačné rovnice sú
- Pre priamku má jej ľubovoľný bod súradnice
![\small P[t,- \frac{2t+1}{3}]](https://lms.umb.sk/filter/tex/pix.php/925952d4a088ed38baaffc731c9eb649.png "\small P[t,- \frac{2t+1}{3}]") Po dosadení do transformačných rovníc
dostaneme sústavu parametrických rovníc
Po dosadení do transformačných rovníc
dostaneme sústavu parametrických rovníc
 -2\\ y' = t + (- \frac{2t+1}{3}) + 2}.")
Výsledok: po úprave na všeobecný tvar dostaneme rovnicu obrazu priamky:
Na syntetické riešenie použite applet Tu. - Keďže každý bod priamky
 má prvú súradnicu rovnú 1, tak stačí hodnotu dosadiť do transformačných rovníc a dostaneme rovnice
má prvú súradnicu rovnú 1, tak stačí hodnotu dosadiť do transformačných rovníc a dostaneme rovnice
 Po dosadení do druhej rovnice
Po dosadení do druhej rovnice  dostaneme rovnicu obrazu priamky
dostaneme rovnicu obrazu priamky  .
.
\)
Cvičenie
Vektory a počítanie s nimi
- Vyriešte sústavu rovníc s parametrom
 v obore a tiež v obore
v obore a tiež v obore 
 .
.
Pozrite si geometrickú interpretáciu Tu. - Vyriešte sústavu rovníc v obore

\times
\left(\begin{matrix}
a \\
b \\
c \\
d \\
e \\
f
\end{matrix}\right)=
\left(\begin{matrix}
\frac{-1}{2} \\
\frac{-3}{2} \\
\frac{5}{2} \\
\frac{-1}{2} \\
1 \\
\frac{-3}{2}
\end{matrix}\right)") .
.
Pozrite si geometrickú interpretáciu Tu. - Zistite, či množina všetkých usporiadaných dvojíc resp. trojíc spolu s dvoma binárnymi operáciami
") je vektorovým priestorom nad poľom reálnych
čísel , ak
je vektorovým priestorom nad poľom reálnych
čísel , ak
;\; r \in \mathbb R }\rbrace") ,
,;\; r \in \mathbb R }\rbrace") ,
,;\; r \in \mathbb R, m \in \mathbb N }\rbrace") ,
,;\; x,y \in \mathbb R }\rbrace") ,
,
- Sú dané body
![\small A=[-1,2], \;B=[5,1] ,\;C=[1,3]](https://lms.umb.sk/filter/tex/pix.php/414c0526ae587c59bf7ca2b03f363dfc.png "\small A=[-1,2], \;B=[5,1] ,\;C=[1,3]") . Nájdite vektory
. Nájdite vektory

a zistite ich dĺžky. Zadanie Tu. - [Mon 1.1.3.] Sú dané body . Určte polohu bodu
 tak, aby
tak, aby
- vektory
 boli umiestnením toho istého vektora.
boli umiestnením toho istého vektora. - vektory
 boli umiestnením toho istého vektora.
boli umiestnením toho istého vektora.
- vektory
- V rovine je daný pravidelný 6-uholník
 .
.
- K vektorom
 nájdite ďalšie orientované úsečky, ktoré reprezentujú dané vektory.
nájdite ďalšie orientované úsečky, ktoré reprezentujú dané vektory.
Otvorte si model šesťuholníka Tu. - Určte koľko viazaných (voľných) vektorov je určených vrcholmi pravidelný 6-uholník
 .
.
- K vektorom
- [Monoszová 1.1.11.] až [Monoszová 1.1.17.] Zbierka úloh z analytickej geometrie. Prvá časť Tu.
- Daný je pravidelný šesťuholník . Vyjadrite vektory

ako lineárne kombinácie vektorov .
. - V rovine je daný šesťuholník, ktorého vrcholy sú určené vzťahmi:
 .
.
Dokážte, že tento šesťuholník je súmerný podľa stredu .
Zadanie Tu.
Riešenie Tu.
.
Zadanie Tu.
Riešenie Tu. - Nech
 sú nekolineárne vektory. Určte číslo tak, aby vektory
sú nekolineárne vektory. Určte číslo tak, aby vektory
 boli kolineárne.
boli kolineárne. - Ukážte, že vektor
") je lineárnou kombináciou vektorov
je lineárnou kombináciou vektorov ,(2,1)") ale nie je LK vektorov
ale nie je LK vektorov ,(2,-4)") .
. - Vyjadrite vektor
") ako LK vektorov
ako LK vektorov ,(1,0,-1),(1,1,-1)") .
. - Ukážte, že vektory
,(0,1,0),(1,-1,1)") sú lineárne (ne)závislé.
sú lineárne (ne)závislé. - Vyjadríte vektor
") ako lineárnu kombináciu vektorov
ako lineárnu kombináciu vektorov ;(-2,1,0);(0,-3,1).")
- Nech vektory
 sú lineárne nezávislé. Zistite, či vektory
sú lineárne nezávislé. Zistite, či vektory
 sú závislé alebo nezávislé.
sú závislé alebo nezávislé.
- Množina
,(2,3)\right\rangle") je báza vektorového priestoru
je báza vektorového priestoru  . Určte
súradnice vektora
. Určte
súradnice vektora  vzhľadom k tejto báze, ak poznáte jeho súradnice
vzhľadom k tejto báze, ak poznáte jeho súradnice ") vzhľadom
ku kanonickej báze
vzhľadom
ku kanonickej báze , \vec{e_2}=(0,1)\right\rangle") . [Hašek 4.2.]
. [Hašek 4.2.] - Daný je vektorový priestor
![\small W=[(1,0,2),(2,4,1),(1,2,3)]⊂\mathbb{\pmb Z^3_5}](https://lms.umb.sk/filter/tex/pix.php/bf39545fa9089af780723cfab823fb3c.png "\small W=[(1,0,2),(2,4,1),(1,2,3)]⊂\mathbb{\pmb Z^3_5}") .
.
- Zistite, či vektory
 so súradnicami v kanonickej báze
so súradnicami v kanonickej báze ,\vec{v}=(1,2,1)") patria do obalu
patria do obalu ![\small [(1,0,2),(2,4,1),(1,2,3)]](https://lms.umb.sk/filter/tex/pix.php/4d1541748ff79167ba18023859b5bd6a.png "\small [(1,0,2),(2,4,1),(1,2,3)]") v obore
v obore  .
. - Nájdite nejakú bázu
 priestoru a určite jeho dimenziu. Určte súradnice vektora
priestoru a určite jeho dimenziu. Určte súradnice vektora  ,
ak
,
ak ") . Priestor obsahuje trojice prvkov telesa zvyškových tried modulo 5.
. Priestor obsahuje trojice prvkov telesa zvyškových tried modulo 5.
- Zistite, či vektory
- Nech
,\;\vec b(-2, -1, 3),\;\vec c (0, 2, 1))") je báza priestoru .
Nájdite vektor vo , ktorého súradnice vzhľadom k báze sú
je báza priestoru .
Nájdite vektor vo , ktorého súradnice vzhľadom k báze sú ") .
. - [Hašek 4.6.1] až [Hašek 4.6.8] Linearni algebra a geometrie. Dostupné Tu.
- Vypočítajte veľkosti uhlov a dĺžky strán v trojuholníku
 , ak .
, ak .![\small A = [1,-2],\; B = [-3,3],\; C = [1,3]](https://lms.umb.sk/filter/tex/pix.php/3bef5eb33c3054007f7c722fa39fe506.png "\small A = [1,-2],\; B = [-3,3],\; C = [1,3]") . Riešenie
...
. Riešenie
... - Vypočítate uhol vektorov a
 , ak
, ak  ; \vec{v} = (2,4).")
- Nech
![\small A = [1, 3], B = [-1, 5], \vec u=(2,-5), \vec v= (−3, 1)](https://lms.umb.sk/filter/tex/pix.php/017902b88f3a72c0913426327244e220.png "\small A = [1, 3], B = [-1, 5], \vec u=(2,-5), \vec v= (−3, 1)") . Rozhodnite,
či napísaný objekt je bod alebo vektor a určte jeho súradnice.
. Rozhodnite,
či napísaný objekt je bod alebo vektor a určte jeho súradnice.
a)-\vec v")
b)-(A+\vec u)") [
[
c)
- [Monoszová 2.1.1.] až [Monoszová 2.1.23.] Zbierka úloh z analytickej geometrie. Druhá časť Tu.
- [Monoszová 2.2.1.] až [Monoszová 2.3.7.] Zbierka úloh z analytickej geometrie. Druhá časť Tu.
- [Monoszová 1.2.1.a] Riešenie alg. Tu; geom. Tu.
- [Monoszová 1.2.1.b] Riešenie Tu.
- [Monoszová 1.2.2.a] Riešenie Tu.
- [Monoszová 1.2.4 ] Riešenie Tu.
- [Monoszová 1.2.5.b] Riešenie Tu.
- [Monoszová 1.2.5.c] Riešenie alg. Tu; geom. Tu.
- Riešte úlohy [Monoszová 1.3.1.] až [Monoszová 1.3.5.].
- Vypočítajte súradnice bodu
 ∈ A^4") v afinnej súradnicovej sústave
v afinnej súradnicovej sústave
 ,
ak
,
ak ; \vec u = e_3 - \sqrt2 e_4;\vec v = -3e_1 + e_2 - e_3- 2e_ 4") .
. - V rovine danej bodmi
![\small A = [2, 1, 3], B = [2, 4, 0], C = [−3, 0, 4]](https://lms.umb.sk/filter/tex/pix.php/9677c54bd1d6db96f81dc0bb8cea97d5.png "\small A = [2, 1, 3], B = [2, 4, 0], C = [−3, 0, 4]") zvoľte afinnú súradnicovú sústavu
zvoľte afinnú súradnicovú sústavu
 . Zistite, aké súradnice má bod M v
. Zistite, aké súradnice má bod M v  , ak jeho
súradnice v sú
, ak jeho
súradnice v sú ![\small [5, 3])](https://lms.umb.sk/filter/tex/pix.php/0e8d92d16f33e2ae254b91b3e18618ac.png "\small [5, 3])") .
. - V rovine je daný trojuholník
 a body
a body  v tomto poradí ako stredy strán
v tomto poradí ako stredy strán  . Nájdite súradnice vrcholov trojuholníka
v afinnej sústave súradníc
. Nájdite súradnice vrcholov trojuholníka
v afinnej sústave súradníc  .
. - V rovine je daný pravidelný šesťuholník . Nájdite súradnice vrcholov tohto 6-uholníka v afinnej súradnicovej
sústave
 .
.
- Riešte úlohy [Monoszová 1.4.1.] až [Monoszová 1.4.18.].
- Zistite, či body
![\small M = [9,-2,5], N = [4, 1, 6]](https://lms.umb.sk/filter/tex/pix.php/974bd421bfa210dda41cb67d18699651.png "\small M = [9,-2,5], N = [4, 1, 6]") incidujú s podpriestorom
incidujú s podpriestorom  pre
pre ![\small A = [1, 3, 2], \vec u = (2, -1, 1), \vec v = (1, -1, 0)](https://lms.umb.sk/filter/tex/pix.php/7859ecad3fa4ae689582f603a2d07df6.png "\small A = [1, 3, 2], \vec u = (2, -1, 1), \vec v = (1, -1, 0)") .
.
Návod: Bod leží v podpriestore práve vtedy, keď jeho súradnice vyhovujú parametrickému vyjadreniu, t. j.:
 . Napíšte najskôr parametrické rovnice podpriestoru a dosaďte súradnice bodu . [Vranková, 3L1].
. Napíšte najskôr parametrické rovnice podpriestoru a dosaďte súradnice bodu . [Vranková, 3L1]. - Dokážte, že pre každé
 množina bodov
množina bodov ![\small {[1, 0, 1], [3, 3, 5], [4, 1, 6], [1 + 2t + 3u, 3t + u, 1 + 4t + 5u]}](https://lms.umb.sk/filter/tex/pix.php/47428d8eb79f10991d01b3c4d0d55664.png "\small {[1, 0, 1], [3, 3, 5], [4, 1, 6], [1 + 2t + 3u, 3t + u, 1 + 4t + 5u]}") priestoru
priestoru  je afinne závislá.
Akú dimenziu má jej afinný obal?
je afinne závislá.
Akú dimenziu má jej afinný obal? - Určte aspoň jedno parametrické vyjadrenie roviny, ktorá prechádza bodom
![\small N = [-2, 3, 0]](https://lms.umb.sk/filter/tex/pix.php/025567a1d3ab183d7657bf4c2715170b.png "\small N = [-2, 3, 0]") a obsahuje priamku
a obsahuje priamku
 .
. - Riešte úlohy z práce (Tisoň, 2011) k téme: Lineárne podpriestory, parametrické a všeobecné vyjadrenia.
- Vyšetrite vzájomnú polohu danej priamky a roviny v
 , ak:
, ak:  ,
,  . [Vranková, 4L1].
. [Vranková, 4L1]. - Zistite vzájomnú polohu priamky a roviny v
 , ak
, ak  ,
,  .
. - Zistite vzájomnú polohu priamok


- Určte afinné zobrazenie
 zobrazujúce
repér
zobrazujúce
repér  :
:
![\small O=[0, 0],\overrightarrow{e_1}= [1, 0], \overrightarrow{e_2}=[0, 1]](https://lms.umb.sk/filter/tex/pix.php/3bc082c1ca429d3d532b6d2ac1885e88.png "\small O=[0, 0],\overrightarrow{e_1}= [1, 0], \overrightarrow{e_2}=[0, 1]") do
do ![\small O'=[1, 1], \overrightarrow{e'_1}=[0, 1], \overrightarrow{e'_2}=[ 1 , 0]](https://lms.umb.sk/filter/tex/pix.php/a901128b615bb55454fdd7633d9cce87.png "\small O'=[1, 1], \overrightarrow{e'_1}=[0, 1], \overrightarrow{e'_2}=[ 1 , 0]") .
. -
do
![\small O'=[0, 0], \overrightarrow{e'_1}=[-1, 0], \overrightarrow{e'_2}=[ 0 , -1](https://lms.umb.sk/filter/tex/pix.php/5a58875d8d23211cfcb29a9f67520846.png "\small O'=[0, 0], \overrightarrow{e'_1}=[-1, 0], \overrightarrow{e'_2}=[ 0 , -1") .
.
- Afinné zobrazenie je dané transformačnými rovnicami
 . Určte
. Určte
- do akých bodov sa zobrazia body [0, 0], [5, 2], [−1, 4]
- ako sa zobrazia priamky

- grafickú interpretáciu v GeoGebre a zistite, čo je obrazom súradných osí v rovine, použite model "Repér" Tu
- Dané je afinné zobrazenie
 . Určite
. Určite
- obrazy bodov [0, 3], [1,4], [−1, -1]
- ktoré body sa zobrazia do bodov [-11, 0], [-7, 2] a [1, 6]
- ako sa zobrazia priamky

- Určte afinné zobrazenie, pre ktoré sú body priamky
 samodružné a bod [0, 0] sa zobrazí do [−1, −2].
samodružné a bod [0, 0] sa zobrazí do [−1, −2]. - Dané je afinné zobrazenie
 . Na priamke
. Na priamke  nájdite bod ,
ktorého obraz leží na tej istej priamke. Pomoc: najskôr určte obraz
nájdite bod ,
ktorého obraz leží na tej istej priamke. Pomoc: najskôr určte obraz  a potom priesečník (\small P= p\cap p' \). Priamku
a potom priesečník (\small P= p\cap p' \). Priamku  určte aj konštrukčne ako GMB.
určte aj konštrukčne ako GMB.
Riešené príklady
- Nájdite maticu afinnej transformácie , pričom platí
![\small O=[0, 0] \rightarrow O'=[1, 1]](https://lms.umb.sk/filter/tex/pix.php/0765f044b47d3ef64bf5d8ac93a2a27b.png "\small O=[0, 0] \rightarrow O'=[1, 1]")
![\small \overrightarrow{e_1} =[1, 0] \rightarrow \overrightarrow{e'_1} =(0, -1)](https://lms.umb.sk/filter/tex/pix.php/b99eb702a27fe10d9abc98f574ba3cda.png "\small \overrightarrow{e_1} =[1, 0] \rightarrow \overrightarrow{e'_1} =(0, -1)")
![\small \overrightarrow{e_2}=[0, 1] \rightarrow \overrightarrow{e'_2}=(-1, 0)](https://lms.umb.sk/filter/tex/pix.php/9fb07fc8c4a703075755f8eaf43dce94.png "\small \overrightarrow{e_2}=[0, 1] \rightarrow \overrightarrow{e'_2}=(-1, 0)") .
.
Riešenie.
Keďže máme obraz repéra, tak môžeme použiť geometrický model "Obraz repéru" Tu, v ktorom nastavíme odpovedajúce hodnoty pre obraz repéra.
Repér pre dané afinné zobrazenie je![\small O'=[1, 1], \overrightarrow{e'_1}=(0, -1 , \overrightarrow{e'_2}=(-1, 0) \rbrace](https://lms.umb.sk/filter/tex/pix.php/04f483745713111a02c837bbd052ec8a.png "\small O'=[1, 1], \overrightarrow{e'_1}=(0, -1 , \overrightarrow{e'_2}=(-1, 0) \rbrace") .
Transformačné rovnice budú mať analytické vyjadrenie
.
Transformačné rovnice budú mať analytické vyjadrenie

Skúmajme, či táto transformácia má samodružné body. Ak bod![\small M=[x, y]](https://lms.umb.sk/filter/tex/pix.php/afca5e5a17438cf3e0eb295dfb5c122d.png "\small M=[x, y]") je samodružný, tak musí pre jeho obraz
je samodružný, tak musí pre jeho obraz ![\small f(M)=M'[x', y']](https://lms.umb.sk/filter/tex/pix.php/5d3cc6ed6b8ac44ffd056d25fdb2687d.png "\small f(M)=M'[x', y']") platiť:
platiť:
 .
.
Po dosadení do transformačných rovníc dostaneme ,
,
čo je množina bodov = priamka. Neskôr ukážeme, že transformácia je zhodné zobrazenie.
Preto priamka samodružných bodov  je osou súmernosti.
je osou súmernosti.
Geometrická interpretácia - riešenie Tu - V rovine je posunutie určené vektorom
") . V posunutí sa trojuholník
. V posunutí sa trojuholník  so súradnicami
so súradnicami ![\small K = [1; 1], L = [4; 3], M = [2; 5]](https://lms.umb.sk/filter/tex/pix.php/e3495d469cb175a5fccd8317021b70f7.png "\small K = [1; 1], L = [4; 3], M = [2; 5]") zobrazí sa na
trojuholník
zobrazí sa na
trojuholník  so súradnicami
so súradnicami ![\small K'= [2; -1], L' = [5; 1], M' = [3; 3]](https://lms.umb.sk/filter/tex/pix.php/fcd9c282160c70ca989a499b862178aa.png "\small K'= [2; -1], L' = [5; 1], M' = [3; 3]") .
.
a) Narysujte obraz v GeoGebre pomocou nástroja Posunutie.
b) Nájdite analytické vyjadrenie tejto zhodnosti.
Návod: Poznáme obrazy![\small O'= [1; -2], K' = [2; -1], M' = [3; 3]](https://lms.umb.sk/filter/tex/pix.php/9e85f67c85cfe23fd070431a6d8fa740.png "\small O'= [1; -2], K' = [2; -1], M' = [3; 3]") a ich dosadením spolu so súradnicami
a ich dosadením spolu so súradnicami ![\small K = [1; 1], M = [2; 5]](https://lms.umb.sk/filter/tex/pix.php/de2eabc53d5450b1d9bdb6a8e232f2be.png "\small K = [1; 1], M = [2; 5]") do rovnice
do rovnice
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} a & c \\ b & d \\ \end{array} \right)+\left( \begin{array}{} 1 & -2\end{array} \right)")
dostaneme 4 rovnice o 4 neznámych


Riešenie.
Riešenie sústavy v GeoGebre Tu . Pomoc - otvorte si applet Tu.
Cvičenie.
- Riešte úlohy zo zbierky Monoszová - čast 4.3, 4.4. a 4.5.
- Zistite, či posunutie roviny
=X' = X+\vec{u}") pre pevne zvolený
vektor posunutia
pre pevne zvolený
vektor posunutia  je afinné zobrazenie.
je afinné zobrazenie. - Určite obraz trojuholníka , kde
![\small K = [−3; 5], L = [−5; 2], M = [1; 3]](https://lms.umb.sk/filter/tex/pix.php/49ef7f12dbd3bf345b8b2efcf2e6701b.png "\small K = [−3; 5], L = [−5; 2], M = [1; 3]") v stredovej súmernosti určené analytickým vyjadrením
v stredovej súmernosti určené analytickým vyjadrením
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} -1 & 0 \\ -1 & 0 \\ \end{array} \right)+\left( \begin{array}{} -4 & 8\end{array} \right)") . Návod pozri v práci (Ptáčková, 2016, str.64), dostupné Tu.
. Návod pozri v práci (Ptáčková, 2016, str.64), dostupné Tu. - Riešte ďalšie úlohy z práce (Ptáčková, 2016, od str.65).
- Je daná osová súmernosť osou , ktorá je určená bodmi
![\small Q_1 = [-2; -3], Q_2 = [4; 3]](https://lms.umb.sk/filter/tex/pix.php/356732ad02ffeb1c057449896fc9634d.png "\small Q_1 = [-2; -3], Q_2 = [4; 3]") a štvoruholník
a štvoruholník  . Narysujte obraz
štvoruholníka obraz
. Narysujte obraz
štvoruholníka obraz  v GeoGebre pomocou nástroja Osová súmernosť. Štvoruholník zvoľte tak, aby jeho dve strany pretínali os súmernosti. Určte analytické vyjadrenie tejto osovej súmernosti. Návod analogický ako v predchádzajúcej úlohe alebo zostrojte obrazy
v GeoGebre pomocou nástroja Osová súmernosť. Štvoruholník zvoľte tak, aby jeho dve strany pretínali os súmernosti. Určte analytické vyjadrenie tejto osovej súmernosti. Návod analogický ako v predchádzajúcej úlohe alebo zostrojte obrazy  .
.
\)
Záver
Učebnica „Afinná geometria – zobrazenia“ predstavuje spojenie klasického matematického poznania s modernými edukačnými nástrojmi. Vďaka analytickému prístupu, podporenému vizualizáciou v prostredí GeoGebra, ponúka študentom komplexný pohľad na geometriu nielen ako sústavu pravidiel a výpočtov, ale aj ako spôsob uvažovania o priestore, pohybe a vzťahoch.
Autori veria, že integrácia digitálnych nástrojov do teórie afinných zobrazení prispeje k lepšiemu porozumeniu tejto oblasti, ale aj k rozvoju pedagogických zručností budúcich učiteľov matematiky. Didaktická reflexia každého pojmu i transformácie je súčasťou ich prípravy na vyučovanie v podmienkach 21. storočia.
Autori veria, že integrácia digitálnych nástrojov do teórie afinných zobrazení prispeje k lepšiemu porozumeniu tejto oblasti, ale aj k rozvoju pedagogických zručností budúcich učiteľov matematiky. Didaktická reflexia každého pojmu i transformácie je súčasťou ich prípravy na vyučovanie v podmienkach 21. storočia.
Afinná geometria je disciplínou, ktorá spája teoretické poznatky matematiky so širokými možnosťami ich praktického využitia. V tejto učebnici sme sa zamerali na kľúčové pojmy a princípy, ktoré sú nevyhnutné na pochopenie tejto oblasti, od východiskových konceptov vektorových priestorov a afinných podpriestorov až po aplikácie afinných zobrazení.
Jednou z hlavných predností afinného prístupu je jeho schopnosť univerzálneho použitia. Afinné transformácie nájdu uplatnenie v oblasti geometrie, analýzy, fyziky, informatike a ďalších disciplínach, kde je dôležité popísať a analyzovať geometrické útvary a ich vzájomné vzťahy. Napríklad v informatike tvoria afinné zobrazenia teoretický základ pre spracovanie obrazu, počítačové grafiky a simulácie. Vo fyzike sa týmto zobrazeniam pripisuje dôležitá úloha pri štúdiu mechaniky alebo teórie relativity.
Dôraz, ktorý sme kládli na prepojenie teórie a praktických aplikácií, odráža potreby moderného vzdelávania, ktoré kombinuje matematickú presnosť s kreativitou a schopnosťou riešiť reálne problémy. Prostredníctvom tejto učebnice sme chceli študentom nielen odovzdať vedomosti, ale aj ich motivovať k hlbšiemu štúdiu a experimentovaniu.
Dôraz, ktorý sme kládli na prepojenie teórie a praktických aplikácií, odráža potreby moderného vzdelávania, ktoré kombinuje matematickú presnosť s kreativitou a schopnosťou riešiť reálne problémy. Prostredníctvom tejto učebnice sme chceli študentom nielen odovzdať vedomosti, ale aj ich motivovať k hlbšiemu štúdiu a experimentovaniu.
Na záver treba zdôrazniť, že afinná geometria je len jednou z kľúčových oblastí geometrie. Jej pochopenie otvára dvere k štúdiu pokročilejších konceptov, ako sú projektívna geometria, diferenciálna geometria alebo algebraická topológia. Okrem toho afinná geometria podporuje rozvoj kritického myslenia a schopnosť pracovať s abstraktnými modelmi, čo je nevyhnutné v mnohých odboroch vedy a techniky.
Veríme, že táto učebnica poskytne študentom pevný teoretický základ a prínosné nástroje pre ich akademický aj profesionálny rast. Rovnako dúfame, že bude slúžiť ako hodnotný zdroj poznatkov, ktoré študenti zužitkujú pri riešení praktických úloh a pri svojom ďalšom napredovaní v štúdiu matematiky a príbuzných disciplín.
Ďakujeme, že ste siahli po tejto učebnici, a prajeme veľa úspechov vo vašom štúdiu.
Ďakujeme, že ste siahli po tejto učebnici, a prajeme veľa úspechov vo vašom štúdiu.
Literatúra
Odporúčaná literatúra
- Descartes, R. (1954). The Geometry of René Descartes (transl. D. E. Smith & M. L. Latham). Dover Publications. (Pôvodné dielo publikované 1637). Online verzia
- Drančáková, M. (2021). SageMath pre leteckých inžinierov. TU Košice, Fakulta aeronautiky, diplomová práca.
- Brajerčík, J., Demko, M. (2018). Matematika pre študentov prírodovedných odborov. Kapitoly 5–6. Prešov: Univerzitná knižnica PU. Online verzia
- Čižmár, J. (2007). O význame základného poľa v geometrii. In: Matematika v proměnách věků V. Praha: Matfyzpress, s. 83–96. ISBN 978-80-7378-017-3.
- Duplák, J. (2004). Afinná a Euklidovská geometria. Prešov: FHPV PU, Katedra matematiky.
- Hašek, R. (2020). Linearni algebra a geometrie. Pedagogická fakulta JU, Č. Budějovice. Dostupné Tu.
- Hašek, R. (2019). Planimetrie - afinné zobrazení. Pedagogická fakulta JU, Č. Budějovice. Dostupné Tu.
- Haviar, M. (2000). Algebra III. Lineárna algebra. Pedagogická fakulta UMB, skriptá. Dostupné Tu.
- Hejný, M., Zaťko, V., Kršňák, P. (1985). Geometria 1. SPN, Bratislava.
- Hlinená, D. (2020). Lineárne transformácie. FEKT VUT Brno. Prenášky 7 až 10. Dostupné Tu.
- Chalmovianska, J. (2015). Afinný priestor. FMFI UK Bratislava. Dostupné Tu.
- Chalmoviansky, P. (2010). Geometria afinných zobrazení euklidovských priestorov. Dostupné Tu.
- Chalmoviansky, P. (2010). Geometria afinných zobrazení euklidovských priestorov. FMFI UK Bratislava.
- Monoszová, G. (2010–2012). Analytická geometria I–II. FPV UMB, Banská Bystrica. [Kapitoly I–III, zbierka úloh]
- Olšák, P. (2007). Lineární algebra. Praha, 2000-2007. Dostupné Tu.
- Ptáčková, T. (2016). Analytická reprezentace shodných zobrazení na středních školách. Diplomová práca MFF UK Praha. Dostupné Tu.
- Tisoň, K. (2011). Geometria 1. Materiály pre študentov na FMFI Bratislava. Dostupné Tu.
- Velichová, D. (2012). Geometria 1. Elektronická učebnica, STU Bratislava. Online verzia
- Vodičková, V. (2010). Aplikácie vektorového súčinu. Dostupné Tu.
- Vranková, E. (20..). Geometria 2 – Analytická geometria lineárnych útvarov. Trnavská univerzita v Trnave. ISBN 978-80-8082-681-9. Dostupné Tu.
- Zlatoš, P. (2011). Lineárna algebra a geometria. Marenčin PT, Bratislava 2011. ISBN 9788081141119. Dostupné Tu.
Zbierky.
Softvér.