Afinný priestor a afinné zobrazenia interaktívne
Completion requirements
Zhodnostné zobrazenia
Otáčanie
Definícia (Otáčanie).
Nech je daný bod , uhol
, uhol  (veľkosť uhla je nanajvýš 360°) a orientácia kladná (proti smeru hodinových ručičiek) resp. záporná (v smeru hodinových ručičiek). Zobrazenie, pre ktoré platí:
(veľkosť uhla je nanajvýš 360°) a orientácia kladná (proti smeru hodinových ručičiek) resp. záporná (v smeru hodinových ručičiek). Zobrazenie, pre ktoré platí:
Nech je daný bod
, uhol (veľkosť uhla je nanajvýš 360°) a orientácia kladná (proti smeru hodinových ručičiek) resp. záporná (v smeru hodinových ručičiek). Zobrazenie, pre ktoré platí:
- obrazom bodu je bod ,
- obrazom bodu
 je bod
je bod  , ktorý leží na kružnici
, ktorý leží na kružnici ") a zároveň uhol
a zároveň uhol  je zhodný s uhlom
je zhodný s uhlom  , pričom orientácia je kladná, resp. záporná, sa nazýva otočenie ,
, pričom orientácia je kladná, resp. záporná, sa nazýva otočenie , - Bod sa nazýva stred otočenia. Otočenie so stredom a uhlom a kladnou resp. zápornou orientáciou budeme označovať
 .
.
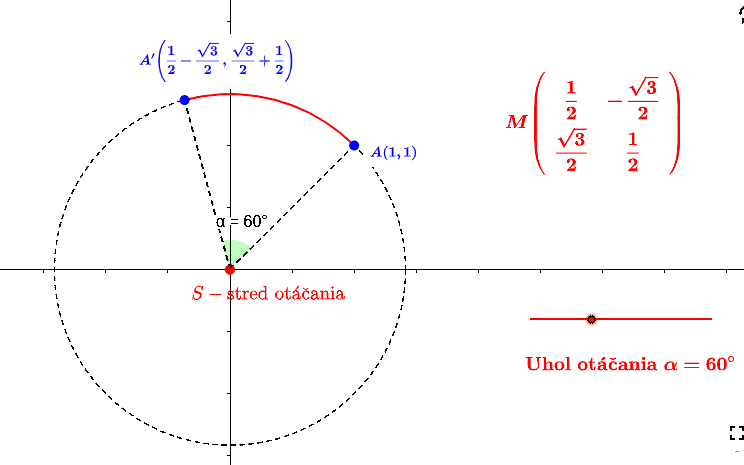
Z planimetrie vieme, že otáčanie je zhodnostné zobrazenie, preto zachováva dĺžku úsečky. Otáčanie je afinné zobrazenie určené stredom otáčania a uhlom otáčania. Otáčanie  so stredom
so stredom ![\small S\left[0,0 \right]](https://lms.umb.sk/filter/tex/pix.php/5dd9bf145cf35a7f935af843f5331bec.png "\small S\left[0,0 \right]") zobrazuje
zobrazuje
so stredom zobrazuje
bod ![\small A\left[x,y \right]](https://lms.umb.sk/filter/tex/pix.php/24549499f0818bd56df20f744e0f4807.png "\small A\left[x,y \right]") do bodu
do bodu ![\small A' \left[\left(x .\cos \; \alpha-y.\sin \; \alpha \right) , \left( x.\cos \; \alpha+y.\sin \; \alpha \right) \right]](https://lms.umb.sk/filter/tex/pix.php/c41e8be4f2562b50106dd1ca129ccaf1.png "\small A' \left[\left(x .\cos \; \alpha-y.\sin \; \alpha \right) , \left( x.\cos \; \alpha+y.\sin \; \alpha \right) \right]")
Otvorte si applet Tu.
do bodu Otvorte si applet Tu.
Tvrdenie (Transformačné rovnice otáčania okolo počiatku).
Analytické vyjadrenie otáčania so stredom a uhlom má maticový tvar
(RO)=\left( \begin{array}{} \cos \alpha & -\sin α \\ \sin α & \cos α \\ \end{array} \right)\times \left(\begin{array}{ccc}x \\ y \end{array}\right),")
kde je uhol otočenia a
je uhol otočenia a  je celé číslo.
je celé číslo.
Analytické vyjadrenie otáčania so stredom
a uhlom má maticový tvar (RO)
kde
je uhol otočenia a je celé číslo. Dôkaz.
Využitím polárnych súradníc a aplikáciou súčtových vzorcov pre funkcie sínus a kosínus, ľahko dokážeme toto tvrdenie. Otvorte si prezentáciu Tu, ktorá prezentuje takýto dôkaz.
Využitím polárnych súradníc a aplikáciou súčtových vzorcov pre funkcie sínus a kosínus, ľahko dokážeme toto tvrdenie. Otvorte si prezentáciu Tu, ktorá prezentuje takýto dôkaz.
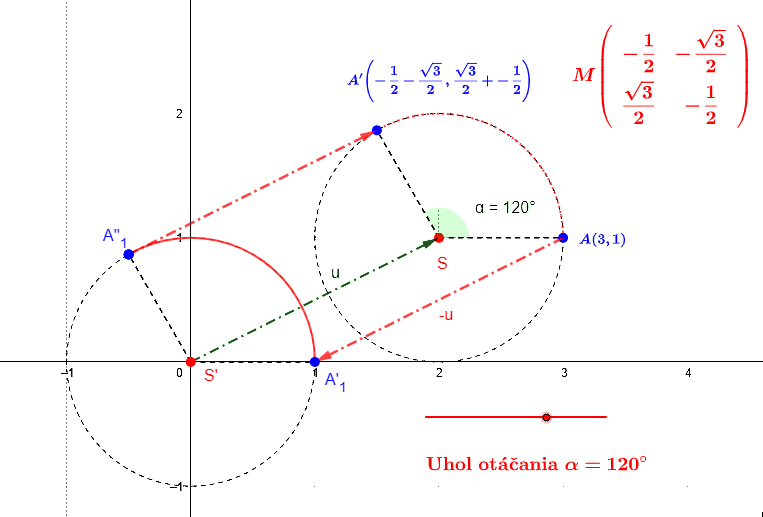
V predchádzajúcej kapitole sme stredovú súmernosť vyjadrili ako zložené zobrazenie z troch zobrazení, ktorých transformačné rovnice poznáme resp. ktoré sa ľahko odvodia. Boli to zobrazenia:
![\small S\left[s_1,s_2 \right]](https://lms.umb.sk/filter/tex/pix.php/e39c1956f3b144ca2eea43e4daf04619.png "\small S\left[s_1,s_2 \right]") . Potom dostaneme
. Potom dostaneme
 1. posunutie
1. posunutie  o vektor
o vektor ") určené maticou
určené maticou
") .
.
2. otáčanie so stredom dané maticou
 & -\sin\left(\alpha\right) & 0 \\ \sin\left(\alpha\right) & \cos\left(\alpha\right) & 0 \\ 0 & 0 & 1 \end{matrix}\right)") .
.
3. a posunutie o vektor
o vektor ") určené maticou
určené maticou
") .
.
Otáčanie ako zložené zobrazenie je dané súčinom matíc v danom poradí. Ich postupným vynásobením dostaneme transformačnú maticu otáčania so stredom:
 & -\sin\left(\alpha\right) & s_1-s_1\cos\left(\alpha\right)+s_2\sin\left(\alpha\right) \\ \sin\left(\alpha\right) & \cos\left(\alpha\right) & s_2-s_2\cos\left(\alpha\right)-s_1\sin\left(\alpha\right) \\ 0 & 0 & 1 \end{matrix}\right)") .
.
Na základe vyššie popísaných vlastností zložených zobrazení môžeme vysloviť tvrdenie, ktoré popisuje transformačné rovnice otáčania so stredom a uhlom
so stredom a uhlom  .
.
- posunutia
 o vektor
o vektor ") ,
, - stredovej súmernosti
![\small \varrho_{S[0,0]}](https://lms.umb.sk/filter/tex/pix.php/533648fbd418b352f6ae06bfc6c62e76.png "\small \varrho_{S[0,0]}") ,
, - posunutia
 o vektor
o vektor ") .
.
. Potom dostaneme
o vektor určené maticou . 2. otáčanie
so stredom dané maticou . 3. a posunutie
o vektor určené maticou . Otáčanie ako zložené zobrazenie je dané súčinom matíc v danom poradí. Ich postupným vynásobením dostaneme transformačnú maticu otáčania so stredom
:. Na základe vyššie popísaných vlastností zložených zobrazení môžeme vysloviť tvrdenie, ktoré popisuje transformačné rovnice otáčania
so stredom a uhlom .Tvrdenie (Transformačné rovnice otáčania okolo stredu ).
Analytické vyjadrenie otáčania so stredom a uhlom má maticový tvar
(ROT)= \left(\begin{matrix} \cos\left(\alpha\right) & -\sin\left(\alpha\right) & s_1-s_1\cos\left(\alpha\right)+s_2\sin\left(\alpha\right) \\ \sin\left(\alpha\right) & \cos\left(\alpha\right) & s_2-s_2\cos\left(\alpha\right)-s_1\sin\left(\alpha\right) \\ 0 & 0 & 1 \end{matrix}\right) \times \left(\begin{matrix} x \\ y \\ 1 \end{matrix}\right),")
kde je uhol otočenia a je celé číslo.
). Analytické vyjadrenie otáčania so stredom
a uhlom má maticový tvar (ROT)
kde
je uhol otočenia a je celé číslo. Poznámka.
Niekedy sa všeobecné transformačné rovnice otočenia uvádzajú v upravenej podobe:\cos\alpha - (y - s_2)\sin\alpha +s_1")
\sin\alpha + (y - s_2)\cos\alpha+s_2")
Niekedy sa všeobecné transformačné rovnice otočenia uvádzajú v upravenej podobe:
Príklad.
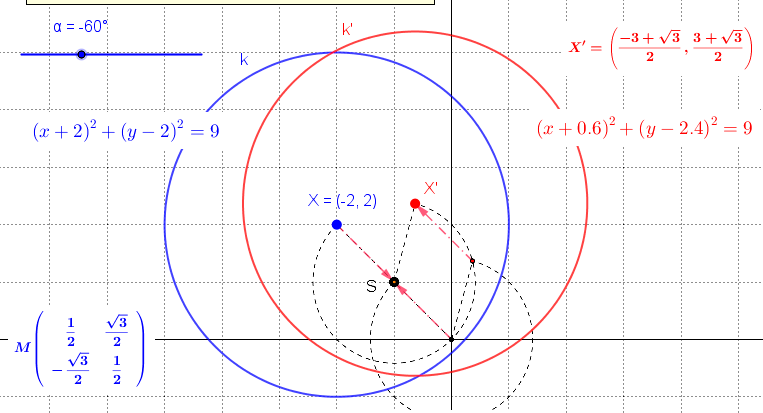
V rovine je otočenie určené stredom![\small S = [−1; 1]](https://lms.umb.sk/filter/tex/pix.php/29133975b65446dd0b21e48795ced112.png "\small S = [−1; 1]") a o orientovaným uhlom
a o orientovaným uhlom  . Určite jeho transformačné rovnice a obraz kružnice
. Určite jeho transformačné rovnice a obraz kružnice ^2 + (y − 2)^2 = 9") .
.
V rovine je otočenie určené stredom
a o orientovaným uhlom . Určite jeho transformačné rovnice a obraz kružnice . Riešenie.
Otočenie v rovine so stredom a uhlom má transformačné rovnice:
\cos(-60°) - (y- 1)\sin(-60°)-1 = \frac{1}{2}(x + 1) + \frac{\sqrt{3}}{2}(y - 1)-1= \frac{1}{2}x + \frac{\sqrt{3}}{2}y - \frac{\sqrt{3}}{2} - \frac{1}{2}")
\sin(−60°) + (y -1)\cos(−60°) +1=-\frac{\sqrt{3}}{2}x + \frac{1}{2}y + \frac{1}{2} - \frac{\sqrt{3}}{2}") .
.
 - 2")
 + 2") ,
,
kde![\small t \in [0, 2\pi]](https://lms.umb.sk/filter/tex/pix.php/7a8558b7e45812ba4cfac008954a8260.png "\small t \in [0, 2\pi]") . Tieto hodnoty dosadíme do transformačných rovníc otáčania. Podrobnejší výpočet, ktorý bol spracovaný v súčinnosti s umelou inteligenciou nájdete Tu.Riešenie pomocou vlastnosti zhodného zobrazenia:
. Tieto hodnoty dosadíme do transformačných rovníc otáčania. Podrobnejší výpočet, ktorý bol spracovaný v súčinnosti s umelou inteligenciou nájdete Tu.Riešenie pomocou vlastnosti zhodného zobrazenia:
"Stred danej kružnice (vzoru) sa zobrazí do stredu hľadanej kružnice (obrazu) a polomer sa nezmení."Súradnice stredu danej kružnice sú![\small [-2,2]](https://lms.umb.sk/filter/tex/pix.php/11906b993b9447d8649b734a3c11da5d.png "\small [-2,2]") , ktoré dosadíme do transformačných rovníc
, ktoré dosadíme do transformačných rovníc
\frac{1}{2} +(2-1) \frac{-\sqrt{3}}{2}-1 = -\frac{3}{2} + \frac{\sqrt{3}}{2},")
\frac{-\sqrt{3}}{2}(-1) + (2-1) \frac{1}{2}(1) = \frac{3}{2} + \frac{\sqrt{3}}{2}.")
Obrazom kružnice je kružnica a jej rovnica má tvar:
^2+\left(y-\frac{3}{2} - \frac{\sqrt{3}}{2} \right )^2=9") .
.
 \)
\)
Otočenie v rovine so stredom
a uhlom má transformačné rovnice: .
- Riešenie pomocou parametrických rovníc kružnice.
- Na určenie obrazu kružnice
^2 + (y - 2)^2 = 9") potrebujeme jej parametrické vyjadrenie v tvare
potrebujeme jej parametrické vyjadrenie v tvare
, kde
. Tieto hodnoty dosadíme do transformačných rovníc otáčania. Podrobnejší výpočet, ktorý bol spracovaný v súčinnosti s umelou inteligenciou nájdete Tu.Riešenie pomocou vlastnosti zhodného zobrazenia: "Stred danej kružnice (vzoru) sa zobrazí do stredu hľadanej kružnice (obrazu) a polomer sa nezmení."Súradnice stredu danej kružnice sú
, ktoré dosadíme do transformačných rovníc Obrazom kružnice je kružnica a jej rovnica má tvar:
.  \)
\)