Afinný priestor a afinné zobrazenia interaktívne
Abschlussbedingungen
Afinný n-rozmerný priestor
Pri syntetickom prístupe v geometrii sme vychádzame z euklidovského priestoru podľa Euklidových Základov, v ktorom sa základné geometrické útvary (bod, priamka) nedefinovali. Vedeli sme jednoznačne rozhodnúť o pravdivosti výrokov typu: Bod patrí alebo nepatrí danému útvaru. Tento prístup z matematického hľadiska predstavuje zásadný problém: Nevieme jasne zadefinovať, čo je to (bodová) množina.
V predchádzajúcich kapitolách (podobne tomu bolo aj historicky vo vývoji geometrie) boli zavedené základné pojmy:}") , ktorej vektory sú navzájom kolmé a majú jednotkovú dĺžku. Takejto báze tiež hovoríme ortonormálová báza.
, ktorej vektory sú navzájom kolmé a majú jednotkovú dĺžku. Takejto báze tiež hovoríme ortonormálová báza.
Súradnice pevne zvoleného vektora
pevne zvoleného vektora  v danej báze
v danej báze  zapisujeme pomocou dolného indexu
zapisujeme pomocou dolného indexu
}_{\mathcal{B}}=w_1 \cdot \vec{b_1} \oplus w_2 \cdot\vec{b_2} \oplus ...\oplus w_n \cdot \vec{b_n}") .
.
Tieto pojmy nám umožňujú zaviesť afinný priestor axiomaticky pomocou vektorového priestoru.
V predchádzajúcich kapitolách (podobne tomu bolo aj historicky vo vývoji geometrie) boli zavedené základné pojmy:
- vektor ako prvok vektorového priestoru (štruktúry s predpísanými binárnymi operáciami)
- štandardná báza vektorového priestoru

- súradnice vektora
") v štandardnej báze, pričom zrejme platí
v štandardnej báze, pričom zrejme platí }=v_1 \cdot (1,0,...,0) \oplus v_2 \cdot (0,1,0,...,0) \oplus v_n \cdot (0,0,...,1)") ,
,
, ktorej vektory sú navzájom kolmé a majú jednotkovú dĺžku. Takejto báze tiež hovoríme ortonormálová báza. Súradnice
pevne zvoleného vektora v danej báze zapisujeme pomocou dolného indexu . Tieto pojmy nám umožňujú zaviesť afinný priestor axiomaticky pomocou vektorového priestoru.
Definícia (Afinný priestor).
Afinný priestor nad poľom
nad poľom  je trojica
je trojica ") , kde
, kde
Afinný priestor
nad poľom je trojica , kde
 je množina bodov.
je množina bodov. je vektorový priestor nad poľom .
je vektorový priestor nad poľom . je zobrazenie s vlastnosťami:
je zobrazenie s vlastnosťami:
(AP1)+f(Y,Z)=f(X,Z)")
(AP2)")
je bijektívne zobrazenie.

V definícii afinného priestoru sme použili označnie ") , ktoré sa najčastejšie vyskytuje odbornej literatúre. Toto označenie často nahradíme aj označením, ktoré sme používali v teórii vektorových priestorov
, ktoré sa najčastejšie vyskytuje odbornej literatúre. Toto označenie často nahradíme aj označením, ktoré sme používali v teórii vektorových priestorov  . Teda
. Teda  := \small \overrightarrow{XY}") .
.
, ktoré sa najčastejšie vyskytuje odbornej literatúre. Toto označenie často nahradíme aj označením, ktoré sme používali v teórii vektorových priestorov . Teda .Pozrite si ukážky afinných priestorov Tu.
Podrobne preskúmajte afinný priestor, v ktorom
Podrobne preskúmajte afinný priestor, v ktorom
- množina bodov je množina všetkých usporiadaných dvojíc
![\small [x,y] \in R^2](https://lms.umb.sk/filter/tex/pix.php/da935f2aebd54782ab94814808ef712f.png "\small [x,y] \in R^2") ,
, - vektorový priestor je grupa
") všetkých usporiadaných dvojíc reálnych čísel s operáciou sčítania dvojíc "po zložkách",
všetkých usporiadaných dvojíc reálnych čísel s operáciou sčítania dvojíc "po zložkách", - zobrazenie z množiny je dané vzťahom
![\small f: f([x_1,y_1],[x_2,y_2]) = (x_2 − x_1,y_2 − y_1)](https://lms.umb.sk/filter/tex/pix.php/c248e10743e9963904b1ad162725e653.png "\small f: f([x_1,y_1],[x_2,y_2]) = (x_2 − x_1,y_2 − y_1)") .
.
Príklad.
Dané sú množiny (červená)
 \in \mathbb R^3 ; x_1 + x_2 -2x_3 = -5}\rbrace") ,
,
množina (modrá)
 \in {\small\mathbb R^3} ; x_1 + x_2 -2x_3 = 0}\rbrace")
a zobrazenie}") je odčitovanie trojíc reálnych čísel po zložkách.
je odčitovanie trojíc reálnych čísel po zložkách.
Dokážte, že") je afinný priestor nad poľom . Dynamický obrázok Tu.
je afinný priestor nad poľom . Dynamický obrázok Tu.
Dané sú množiny (červená)
, množina (modrá)
a zobrazenie
je odčitovanie trojíc reálnych čísel po zložkách. Dokážte, že
je afinný priestor nad poľom . Dynamický obrázok Tu.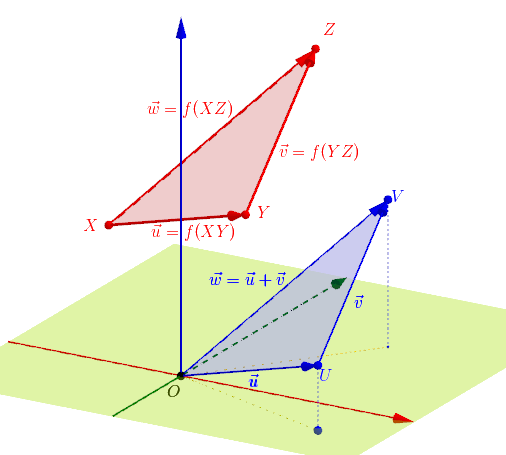
Riešenie.
Pre ľubovoľný bod![\small X[x_1,x_2,x_3] \in \mathcal{A}](https://lms.umb.sk/filter/tex/pix.php/1e32b09cf88a45e990cb4c781e1264a3.png "\small X[x_1,x_2,x_3] \in \mathcal{A}") platí, že
platí, že ") .
.
Pozrite si riešené príklady afinných priestorov zo zbierky Monoszová : Úloha 1.2.1. b, Úloha 1.2.5. b.
Pre ľubovoľný bod
platí, že .
- Podmienka (AP1): zo vzťahov
![\small f(X,Y)=\left [x_1-y_1,x_2-y_2,x_3-y_3 \right ] =\left [ x_1-y_1,x_2-y_2, \frac{1}{2} \left\{(x_1-y_1 )+(x_2-y_2 ) \right\} \right ]](https://lms.umb.sk/filter/tex/pix.php/212ddeb0870fc8fd963a34c97efd0b5e.png "\small f(X,Y)=\left [x_1-y_1,x_2-y_2,x_3-y_3 \right ] =\left [ x_1-y_1,x_2-y_2, \frac{1}{2} \left\{(x_1-y_1 )+(x_2-y_2 ) \right\} \right ]")
![\small f(Y,Z)=\left [y_1-z_1,\;y_2-z_2,y_3-z_3 \right ]=\left [y_1-z_1,\;y_2-z_2, \frac{1}{2} \left\{(y_1-z_1 )+(y_2-z_2 )\right\} \right ]](https://lms.umb.sk/filter/tex/pix.php/b8e2befaa385d58e1495d0dda24dd2d8.png "\small f(Y,Z)=\left [y_1-z_1,\;y_2-z_2,y_3-z_3 \right ]=\left [y_1-z_1,\;y_2-z_2, \frac{1}{2} \left\{(y_1-z_1 )+(y_2-z_2 )\right\} \right ]")
dostávame![\small f(X,Z)=\left [ x_1-z_1,x_2-z_2, \frac{1}{2} ((x_1-z_1 )+(x_2-z_2 )) \right ]](https://lms.umb.sk/filter/tex/pix.php/b2cca5b4b9129c823b0676dc16056680.png "\small f(X,Z)=\left [ x_1-z_1,x_2-z_2, \frac{1}{2} ((x_1-z_1 )+(x_2-z_2 )) \right ]") ,
,
čo bolo treba ukázať. - Podmienka (AP2):
Nech![\small P=[p_1,p_2, \frac{1}{2} (p_1+p_2+5)]](https://lms.umb.sk/filter/tex/pix.php/126cb238179fb33789f0de12490089c7.png "\small P=[p_1,p_2, \frac{1}{2} (p_1+p_2+5)]") je pevne zvolený bod a
je pevne zvolený bod a ![\small X=[x_1,x_2, \frac{1}{2} (x_1+x_2+5)]](https://lms.umb.sk/filter/tex/pix.php/d38c8ae449d1fae5c21ec11dd26cca2a.png "\small X=[x_1,x_2, \frac{1}{2} (x_1+x_2+5)]") ,
, ![\small Y=[y_1,y_2, \frac{1}{2} (x_1+x_2+5)]](https://lms.umb.sk/filter/tex/pix.php/19ede6e8b4bde32d6f735fcf7b401906.png "\small Y=[y_1,y_2, \frac{1}{2} (x_1+x_2+5)]") sú ľubovoľné dva rôzne body. Potom je
sú ľubovoľné dva rôzne body. Potom je ∨(x_2 \neq y_2 )") a zrejme aj pre obrazy
a zrejme aj pre obrazy ![\small f(P,X)=\left [p_1-x_1,p_2-x_2,\frac{1}{2} ((p_1-x_1 )+(p_2-x_2 )) \right ]](https://lms.umb.sk/filter/tex/pix.php/b81647c179eae04ca821555a0c91f131.png "\small f(P,X)=\left [p_1-x_1,p_2-x_2,\frac{1}{2} ((p_1-x_1 )+(p_2-x_2 )) \right ]")
![\small f(P,Y)=\left [ p_1-y_1,p_2-y_2,\frac{1}{2} ((p_1-y_1 )+(p_2-y_2 )) \right ]](https://lms.umb.sk/filter/tex/pix.php/596431e055367812dc5b1a41713657dd.png "\small f(P,Y)=\left [ p_1-y_1,p_2-y_2,\frac{1}{2} ((p_1-y_1 )+(p_2-y_2 )) \right ]")
platí, že sú rôzne. Teda zobrazenie je bijektívne.
Dôkaz, pre podmienku (AP2') nájdete v práci Afinné transformácie na strane 7. Pozrite tiež Príklad 2 na strane 8.
Pozrite si riešené príklady afinných priestorov zo zbierky Monoszová : Úloha 1.2.1. b, Úloha 1.2.5. b.
Poznámky.
Dimenzia (alebo rozmer) afinného priestoru je číslo, ktoré je dimenziou jeho zamerania (dimenziou vektorového priestoru ). Afinný priestor dimenzie 0, 1, 2 budeme v poradí nazývať bod, priamka, rovina.
). Afinný priestor dimenzie 0, 1, 2 budeme v poradí nazývať bod, priamka, rovina.
Dimenzia (alebo rozmer) afinného priestoru je číslo, ktoré je dimenziou jeho zamerania (dimenziou vektorového priestoru
). Afinný priestor dimenzie 0, 1, 2 budeme v poradí nazývať bod, priamka, rovina.Definícia.
(n-1)-rozmerný podpriestor n-rozmerného afinného priestoru nazývame nadrovina priestoru .
(n-1)-rozmerný podpriestor n-rozmerného afinného priestoru
nazývame nadrovina priestoru .Poznámky.
Ak sú body afinného priestoru , tak ľahko nahliadneme platnosť nasledujúcich tvrdení
sú body afinného priestoru , tak ľahko nahliadneme platnosť nasledujúcich tvrdení
Dôkazy (predchádzajúce tvrdenia).
Ak
sú body afinného priestoru , tak ľahko nahliadneme platnosť nasledujúcich tvrdení




 .
.
Dôkazy (predchádzajúce tvrdenia).
- Podľa (A1) a (A2) platí
 , odkiaľ .
, odkiaľ .  , čiže
, čiže  je inverzný prvok k prvku
je inverzný prvok k prvku  v grupe
v grupe ") . Odkiaľ dostávame:
. Odkiaľ dostávame:  .
.- Vyplýva priamo z (A2) - bijekcia.
- Ak
 , potom
, potom  , teda
, teda  a vzhľadom na (3)
a vzhľadom na (3)  .
. - Nech
 . Pretože aj
. Pretože aj  , tak
, tak  , odkiaľ podľa (3)
, odkiaľ podľa (3)  .
.
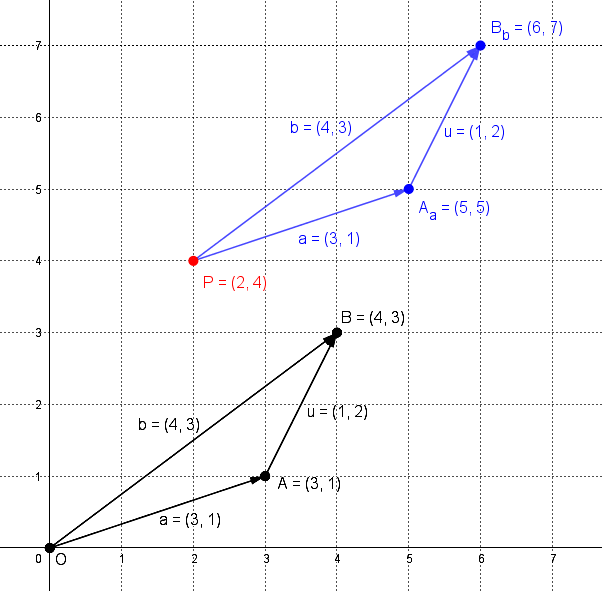
Pripomeňme, že vo vektorovom priestore sme tiež používali termín "bod" v súvislosti s viazaným vektorom  , teda len v súvislosti s vektorovým priestorom
, teda len v súvislosti s vektorovým priestorom ") . V tomto vektorovom priestore voľný vektor
. V tomto vektorovom priestore voľný vektor  predstavoval usporiadanú
predstavoval usporiadanú  -ticu reálnych čísel. Začiatok voľného vektora ("bod") mal súradnice (0,0, ..., 0) a koncový "bod" voľného vektora mal súradnice zhodné so súradnicami daného vektora v štandardnej báze resp. so súradnicami bodu
-ticu reálnych čísel. Začiatok voľného vektora ("bod") mal súradnice (0,0, ..., 0) a koncový "bod" voľného vektora mal súradnice zhodné so súradnicami daného vektora v štandardnej báze resp. so súradnicami bodu  . Vektor sme interpretovali ako posunutie, pohyb. Intuitívne sme používali aj súčet
. Vektor sme interpretovali ako posunutie, pohyb. Intuitívne sme používali aj súčet
 ,
,
ktorý vo vektorovom priestore nie je definovaný (načrtnite si obrázok). Avšak v afinnom priestore to už budeme vedieť definovať. Takýto súčet predstavuje posunutý bod o vektor a v súlade s tvrdením Rozdiel bodov platiť:
o vektor a v súlade s tvrdením Rozdiel bodov platiť: 
, teda len v súvislosti s vektorovým priestorom . V tomto vektorovom priestore voľný vektor predstavoval usporiadanú -ticu reálnych čísel. Začiatok voľného vektora ("bod") mal súradnice (0,0, ..., 0) a koncový "bod" voľného vektora mal súradnice zhodné so súradnicami daného vektora v štandardnej báze resp. so súradnicami bodu . Vektor sme interpretovali ako posunutie, pohyb. Intuitívne sme používali aj súčet , ktorý vo vektorovom priestore nie je definovaný (načrtnite si obrázok). Avšak v afinnom priestore to už budeme vedieť definovať. Takýto súčet predstavuje posunutý bod
o vektor a v súlade s tvrdením Rozdiel bodov platiť: Tvrdenie (Existencia referenčného afinného bodu).
V afinnom priestore platí vlastnost’ (AP2) pre ľubovoľný pevne zvolený bod  , t.j.
, t.j. ") je bijektívne zobrazenie. Body
je bijektívne zobrazenie. Body  nazývame referenčné afinné body.
nazývame referenčné afinné body.
V afinnom priestore
platí vlastnost’ (AP2) pre ľubovoľný pevne zvolený bod , t.j. je bijektívne zobrazenie. Body nazývame referenčné afinné body.Dôkaz. Stačí si uvedomiť, že  = f(P′, P) + f(P, X))") .
.
.Tvrdenie (Rozdiel bodov).
Každými dvomi bodmi afinného priestoru je určený vektor, ktorý je daný ako rozdiel vektorov . Bod
. Bod  je ľubovoľný referenčný bod. Pozrite so obrázok "Vektory a body roviny".
je ľubovoľný referenčný bod. Pozrite so obrázok "Vektory a body roviny".
Každými dvomi bodmi afinného priestoru je určený vektor, ktorý je daný ako rozdiel vektorov
. Bod je ľubovoľný referenčný bod. Pozrite so obrázok "Vektory a body roviny".Dôkaz (bez súradnicového systému).
Nech je afinný priestor nad poľom . V afinnom priestore je zavedená operácia  , ktorá každým dvomi bodmi
, ktorá každým dvomi bodmi  priraďuje vektor
priraďuje vektor  . Táto operácia má nasledujúce vlastnosti:
. Táto operácia má nasledujúce vlastnosti:
Ukázali sme, že operácia priradenia vektora dvom bodom je jednoznačne daná ich „rozdielom“, ktorý je chápaný v zmysle vektorového priestoru . Definitoricky môžeme písať
. Definitoricky môžeme písať  .
.
Nech
je afinný priestor nad poľom . V afinnom priestore je zavedená operácia , ktorá každým dvomi bodmi priraďuje vektor . Táto operácia má nasledujúce vlastnosti:
- Vektor medzi dvoma bodmi je dobre definovaný (AP2), teda existuje zobrazenie
 \mapsto \overrightarrow{AB} \in V") ,
,
ktoré je také, že pre každý pevný (referenčný) bod je zobrazenie  bijektívne zobrazenie z množiny bodov do vektorového priestoru .
bijektívne zobrazenie z množiny bodov do vektorového priestoru . - Existencia afinného bodu ako referencie.
Nech je ľubovoľný pevný bod v
ľubovoľný pevný bod v  (nepotrebujeme ho interpretovať ako začiatok súradnicového systému, stačí, že existuje). Potom pre každý bod
(nepotrebujeme ho interpretovať ako začiatok súradnicového systému, stačí, že existuje). Potom pre každý bod  existuje jednoznačný vektor
existuje jednoznačný vektor  , ktorý reprezentuje jeho afinnú polohu voči .
, ktorý reprezentuje jeho afinnú polohu voči . - Vyjadrenie vektora medzi bodmi pomocou "rozdielu" bodov.
Keďže je vektorový priestor, tak ") je Abelova grupa. Z vlastnosti (AP1) a z vlastností grupy bude pre ľubovoľné vektory určené bodmi
je Abelova grupa. Z vlastnosti (AP1) a z vlastností grupy bude pre ľubovoľné vektory určené bodmi  splnená implikácia:
splnená implikácia:

Stačí si uvedomiť, že sú vektory, pre ktoré platia grupové operácie sčítania, inverzného (tj. opačného) prvku, ... Preto uvedený rozdiel vektorov
sú vektory, pre ktoré platia grupové operácie sčítania, inverzného (tj. opačného) prvku, ... Preto uvedený rozdiel vektorov  je dobre definovaný vo . Keďže výber bodu je ľubovoľný, vidíme, že
je dobre definovaný vo . Keďže výber bodu je ľubovoľný, vidíme, že  závisí iba od bodov a
závisí iba od bodov a  , nie od voľby referenčného bodu.
, nie od voľby referenčného bodu.
Ukázali sme, že operácia priradenia vektora dvom bodom je jednoznačne daná ich „rozdielom“, ktorý je chápaný v zmysle vektorového priestoru
. Definitoricky môžeme písať . Poznámky.
Podmienka (AP2) sa niekedy uvádza takto:
(AP2') existuje práve jeden bod
existuje práve jeden bod  taký, že
taký, že  .
.
(AP2'') taký, že
taký, že  .
.
V tejto kapitole budeme pracovať len s reálnym afinným priestorom nad telesom (poľom) reálnych čísel.
Podmienka (AP2) sa niekedy uvádza takto:
(AP2')
existuje práve jeden bod taký, že . (AP2'')
taký, že . V tejto kapitole budeme pracovať len s reálnym afinným priestorom nad telesom (poľom) reálnych čísel
. Cvičenie.
Zistite, či usporiadané trojice sú afinným priestorom.
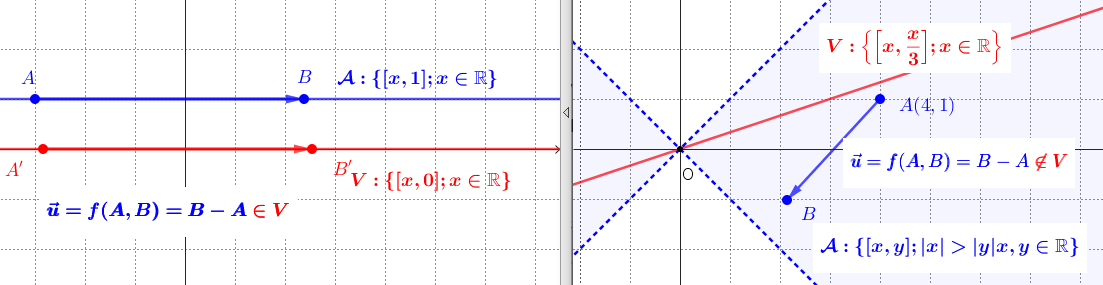
Otvorte si dynamické obrázky: ľavý Tu - príklad afinného priestoru; pravý Tu- nie je afinným priestorom.
 \)
\)
Zistite, či usporiadané trojice
sú afinným priestorom.
Otvorte si dynamické obrázky: ľavý Tu - príklad afinného priestoru; pravý Tu- nie je afinným priestorom.
Poznámky.
- Afinný priestor budeme tiež jednoducho označovať
 alebo ako
alebo ako  . Vektorový priestor prislúchajúci afinnému priestoru
. Vektorový priestor prislúchajúci afinnému priestoru ") budeme označovať ako
budeme označovať ako ") alebo len
alebo len  .
. - Vektorovému priestoru hovoríme tiež zameranie afinného priestoru. Afinný priestor, ktorého zameraním je vektorový priestor nad poľom reálnych čísel nazývame reálny afinný priestor alebo aj aritmetický afinný priestor.
- Affinis znamená latinsky príbuzný. Prvý krát tento pojem použil Leonhard Euler (1707-1783) pre označenie vzťahu vzoru a obrazu v zobrazení, ktoré zachováva deliaci pomer (pozri kapitolu Deliaci pomer Tu). Afinná geometria je geometria bez vzdialenosti/miery.
\)