Afinná geometria
Afinné zobrazenie
Jednoznačnosť AZ
Afinné zobrazenie  determinuje ďalšie zobrazenie
determinuje ďalšie zobrazenie  medzi vektorovými zložkami príslušných euklidovských vektorových priestorov.
medzi vektorovými zložkami príslušných euklidovských vektorových priestorov.
determinuje ďalšie zobrazenie medzi vektorovými zložkami príslušných euklidovských vektorových priestorov.
Definícia - asociované zobrazenie.
Nech je afinné zobrazenie. Zobrazenie nazývame asociovaným zobrazením k afinnému zobrazeniu ,
ak spĺňa nasledujúce podmienky:
je afinné zobrazenie. Zobrazenie nazývame asociovaným zobrazením k afinnému zobrazeniu ,
ak spĺňa nasledujúce podmienky:
Nech
je afinné zobrazenie. Zobrazenie nazývame asociovaným zobrazením k afinnému zobrazeniu ,
ak spĺňa nasledujúce podmienky:

 a
a  také,
že
také,
že =1") , platí
, platí
 = \sum_{i=0}^{k}{α_i f(A_i)}") .
.
Predchádzajúca definícia vlastne hovorí, že asociované zobrazenie „zachováva” lineárne kombinácie bodov.
Veta - korektnosť definície asociovaného zobrazenia.
Zobrazenie je jednoznačné určené a je dobre definované. Ekvivalentný matematický zápis: nech

pre nejaké . Potom existuje práve jedno asociované zobrazenie také, že
. Potom existuje práve jedno asociované zobrazenie také, že
 = f∗(β_0B_0 + \cdot \cdot \cdot + β_kB_k)") .
.
Zobrazenie
je jednoznačné určené a je dobre definované. Ekvivalentný matematický zápis: nech
pre nejaké
. Potom existuje práve jedno asociované zobrazenie také, že
.
Dôkaz korektnosť definície asociovaného zobrazenia.
Existencia a jednoznačnosť asociovaného zobrazenia je daná obrazmi vektorov Vn.
Čo sa týka dobrej definovanosti zápisu v definicii asociovaného zobrazenia, z predpokladu vety vyplýva, že pre nejaké
pre nejaké  . Teda
. Teda
 .
.
Keďže zobrazenie je afinné, a teda zachováva lineárne kombinácie bodov, tak
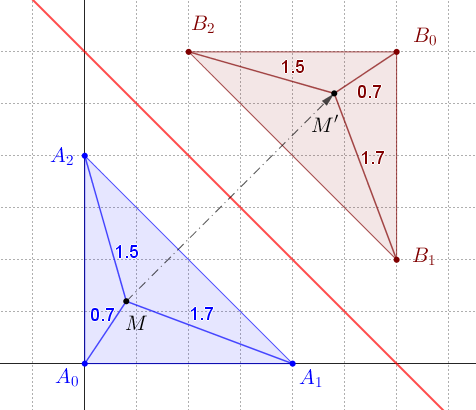
 = f(O) + α_0f(A_0) + · · · + α_kf(A_k) = M' + α_0B_0 + · · · + α_kB_k") . Prezrite si applet z definície
. Prezrite si applet z definície
Existencia a jednoznačnosť asociovaného zobrazenia je daná obrazmi vektorov Vn.
Čo sa týka dobrej definovanosti zápisu v definicii asociovaného zobrazenia, z predpokladu vety vyplýva, že
pre nejaké . Teda
.
Keďže zobrazenie
je afinné, a teda zachováva lineárne kombinácie bodov, tak
. Prezrite si applet z definície
Lineárne nezávislá množina bodov.
Nech je množina bodov euklidovského priestoru. Je celkom prirodzené zaviesť pojem lineárne nezávislých bodov,
ako množinu lineárne nezávislých vektorov
je množina bodov euklidovského priestoru. Je celkom prirodzené zaviesť pojem lineárne nezávislých bodov,
ako množinu lineárne nezávislých vektorov  .
.
Nech
je množina bodov euklidovského priestoru. Je celkom prirodzené zaviesť pojem lineárne nezávislých bodov,
ako množinu lineárne nezávislých vektorov .
Poznámka.
Z predchádzajúcej definície je zrejmé, že v euklidovskom rozmernom priestore existuje najviac
rozmernom priestore existuje najviac  lineárne nezávislých bodov. Naviac tento počet sa dá dosiahnuť.
lineárne nezávislých bodov. Naviac tento počet sa dá dosiahnuť.
Z predchádzajúcej definície je zrejmé, že v euklidovskom
rozmernom priestore existuje najviac lineárne nezávislých bodov. Naviac tento počet sa dá dosiahnuť.
V kapitole "Lineárna kombinácia bodov" sme dokázali vetu
Ľubovoľný bod  sa dá jednoznačne vyjadriť v tvare
sa dá jednoznačne vyjadriť v tvare
 ,
,
kde .
.
sa dá jednoznačne vyjadriť v tvare
,
kde
.
Na základe tohto tvrdenia a definície nezávislých bodov, môžeme povedať, že ľubovoľný bod euklidovského priestoru  sa dá
jednoznačne vyjadriť ako ich lineárna kombinácia.
sa dá
jednoznačne vyjadriť ako ich lineárna kombinácia.
Poznámka o lineárnych zobrazeniach.
Z lineárnej algebry poznáme tvrdenie, že každé lineárne zobrazenie je jednoznačne dané obrazmi prvkov nejakej bázy
priestoru
je jednoznačne dané obrazmi prvkov nejakej bázy
priestoru  .
.
sa dá
jednoznačne vyjadriť ako ich lineárna kombinácia.
Poznámka o lineárnych zobrazeniach.
Z lineárnej algebry poznáme tvrdenie, že každé lineárne zobrazenie
je jednoznačne dané obrazmi prvkov nejakej bázy
priestoru .
Dôsledok obraz repéra.
Nech je repér priestoru
je repér priestoru  a ľubovoľný bod
a ľubovoľný bod  . Ďalej
nech
. Ďalej
nech  sú vektory vektorového priestoru
sú vektory vektorového priestoru  . Potom existuje jediné afinné
zobrazenie také, že
. Potom existuje jediné afinné
zobrazenie také, že
=B") a
a =\pmb {b_i}") pre
pre  .
.
Nech
je repér priestoru a ľubovoľný bod . Ďalej
nech sú vektory vektorového priestoru . Potom existuje jediné afinné
zobrazenie také, že
a pre .
Dôkaz nájdete v učebniciach z lineárnej algebry.
Veta (Jednoznačnosť afinného zobrazenia).
Nech je afinné zobrazenie. Potom je jednoznačne určené obrazmi  lineárne nezávislých bodov z
lineárne nezávislých bodov z  .
.
Nech
je afinné zobrazenie. Potom je jednoznačne určené obrazmi lineárne nezávislých bodov z .
Dôkaz.
Nech=B_0, . . . , f(A_n)=B_n") . V súlade s definíciou nezávislých bodov, vektory
. V súlade s definíciou nezávislých bodov, vektory

sú lineárne nezávislé. Keďže afinné zobrazenie je zároveň aj lineárne, tak pre obrazy vektorov v asociovanom afinnom zobrazení platí
v asociovanom afinnom zobrazení platí
= f^*(A_i-A_0)=f(A_i)-f(A_0)=B_i-B_0") pre
pre  .
.
Podľa dôsledku "obraz repéra" je takto jednoznačne definované afinné zobrazenie. Treba len overiť, či takto definované zobrazenia spĺňa podmienku, že=\pmb {b_i}") .
.
(Urobte to ako cvičenie!)
Nech
. V súlade s definíciou nezávislých bodov, vektory
sú lineárne nezávislé. Keďže afinné zobrazenie je zároveň aj lineárne, tak pre obrazy vektorov
v asociovanom afinnom zobrazení platí
pre .
Podľa dôsledku "obraz repéra" je takto jednoznačne definované afinné zobrazenie. Treba len overiť, či takto definované zobrazenia spĺňa podmienku, že
.
(Urobte to ako cvičenie!)
Príklad.
Dané sú body afinného priestoru![\small \mathcal{A}_4: A[2, 4, 5, 6]; B[−7, 4, 5, 6]; C[6, 11, 3, 7]; D[−3, −10, 9, 4]; E[−3, 11, 3, 7]](https://lms.umb.sk/filter/tex/pix.php/9b09fbccf9c7067f710d5ec3a4f09993.png "\small \mathcal{A}_4: A[2, 4, 5, 6]; B[−7, 4, 5, 6]; C[6, 11, 3, 7]; D[−3, −10, 9, 4]; E[−3, 11, 3, 7]") . Zistite, či sústava
bodov
. Zistite, či sústava
bodov  je afinne (ne)závislá a vypočítajte dimenziu afinného podpriestoru generovaného sústavou
je afinne (ne)závislá a vypočítajte dimenziu afinného podpriestoru generovaného sústavou  (dimenziu obalu ).
(dimenziu obalu ).
Dané sú body afinného priestoru
. Zistite, či sústava
bodov je afinne (ne)závislá a vypočítajte dimenziu afinného podpriestoru generovaného sústavou (dimenziu obalu ).
Riešenie.
Množina bodov je afinne nezávislá, ak sústava vektorov

je lineárne nezávislá. Pre súradnice týchto vektorov dostaneme
; \overrightarrow{AC}= (4, 7, −2, 1);\overrightarrow{AD} = (1, −14, 4, −2); \overrightarrow{AE}= (−5, 7, −2, 1)") .
.
Sústava vektorov W je lineárne nezávislá, ak rovnosť

je splnená práve len pre . V našom prípade to nie je splnené lebo hodnosť matice
. V našom prípade to nie je splnené lebo hodnosť matice
∼
\left(\begin{matrix}
-9 & 0 & 0 & 0 \\
0 & 7 & -2 & 1 \\
0 & -14 & 4 & -2 \\
0 & 7 & -2 & 1
\end{matrix}\right)∼
\left(\begin{matrix}
-9 & 0 & 0 & 0 \\
0 & 7 & -2 & 1 \\
0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0
\end{matrix}\right)")
je dva. Teda hodnosť je menšia ako počet vektorov, preto sústava je lineárne závislá a teda body
je lineárne závislá a teda body  sú afinne závisle. Z poslednej matice vyplýva,
že dva vektory
sú afinne závisle. Z poslednej matice vyplýva,
že dva vektory  sú lineárne nezávislé a vektory
sú lineárne nezávislé a vektory  sú ich lineárne kombinácie.
Preto dimenzia podpriestoru
sú ich lineárne kombinácie.
Preto dimenzia podpriestoru  je rovná dvom. Parametrické vyjadrenie tohto podpriestoru môžeme vyjadriť ako
je rovná dvom. Parametrické vyjadrenie tohto podpriestoru môžeme vyjadriť ako
 .
.
To znamená, že body ležia v rovine  = S") .
.
Množina bodov
je afinne nezávislá, ak sústava vektorov
je lineárne nezávislá. Pre súradnice týchto vektorov dostaneme
.
Sústava vektorov W je lineárne nezávislá, ak rovnosť
je splnená práve len pre
. V našom prípade to nie je splnené lebo hodnosť matice
je dva. Teda hodnosť je menšia ako počet vektorov, preto sústava
je lineárne závislá a teda body sú afinne závisle. Z poslednej matice vyplýva,
že dva vektory sú lineárne nezávislé a vektory sú ich lineárne kombinácie.
Preto dimenzia podpriestoru je rovná dvom. Parametrické vyjadrenie tohto podpriestoru môžeme vyjadriť ako
.
To znamená, že body
ležia v rovine .
Poznámky.
- Nech je
 -rozmerný euklidovský priestor so zameraním
-rozmerný euklidovský priestor so zameraním ") a
nech
a
nech  je afinná transformácia. Potom môžeme definovať asociované zobrazenie
je afinná transformácia. Potom môžeme definovať asociované zobrazenie  afinného zobrazenia
afinného zobrazenia  aj nasledovne:
aj nasledovne:
 \rightarrow V_n(\mathbb R)") ,
,  \rightarrow f(X − Y ) := f(X) − f(Y )")
- Asociované zobrazenie je vlastne "reštrikcia" zobrazenia na vektorový priestor. Zobrazuje vektory
so zamerania na vektory toho istého zamerania.
 \)
\)