Afinná geometria - zobrazenia, vizualizácie, aplikácie
Abschlussbedingungen
Analytické vyjadrenie
Rovnoľahlosť
V tejto kapitole sa budeme zaoberať transformáciami euklidovskej roviny - posunutím a rovnoľahlosťou. Tieto zobrazenia v syntetickom poňatí geometrie definujeme
jednoducho pomocou
- pevne zvoleného vektora -posunutie,
- pevne zvoleného bodu a skalára - homotétia alebo tiež rovnoľahlosť. Ukážeme, že tieto zobrazenia sú afinné a určíme ich transformačné matice.
Rovnoľahlosť  pre pevne zvolený stred rovnoľahlosti
pre pevne zvolený stred rovnoľahlosti  a koeficient
rovnoľahlosti
a koeficient
rovnoľahlosti  je afinné zobrazenie.
je afinné zobrazenie.
pre pevne zvolený stred rovnoľahlosti a koeficient
rovnoľahlosti je afinné zobrazenie.
Dôkaz.
Rovnoľahlosť") v euklidovskej rovine bodu
v euklidovskej rovine bodu  priraďuje bod
priraďuje bod  taký, že pre deliaci pomer bodov
taký, že pre deliaci pomer bodov  platí
platí =k") . Z definície deliaceho pomeru dostaneme vzťah
. Z definície deliaceho pomeru dostaneme vzťah
(h)") ,
,
kde![\small S[s_1,s_2] \in \mathbb E_2](https://lms.umb.sk/filter/tex/pix.php/a1c26e689f4a4cb3e1f0d602a9905e22.png "\small S[s_1,s_2] \in \mathbb E_2") je zvolený stred rovnoľahlosti a
je zvolený stred rovnoľahlosti a  je reálny koeficient.
je reálny koeficient.
V prvom kroku musíme ukázať (dokázať), že obrazom troch kolineárnych bodov v rovnoľahlosti sú opäť tri kolineárne body. Najskôr dokážeme toto tvrdenie analyticky.
Nech![\small A[a_1,a_2],B[b_1,b_2],C[c_1,c_2]](https://lms.umb.sk/filter/tex/pix.php/69afe175d7ed037d38d7f0b09adfa934.png "\small A[a_1,a_2],B[b_1,b_2],C[c_1,c_2]") sú ľubovoľné tri navzájom rôzne kolineárne body. Dvomi bodmi
sú ľubovoľné tri navzájom rôzne kolineárne body. Dvomi bodmi  je určená práve jediná priamka
je určená práve jediná priamka  . Podľa predpokladu bod
. Podľa predpokladu bod  je bodom priamky
je bodom priamky  . V takom prípade existuje parameter
. V takom prípade existuje parameter  taký, že platia rovnosti
taký, že platia rovnosti
") ,
,
") .
.
Označme![\small A'[a'_1,a'_2],B'[b'_1,b'_2],C'[c'_1,c'_2]](https://lms.umb.sk/filter/tex/pix.php/6b451b3f2a1bcbe476b54b08ff273ea9.png "\small A'[a'_1,a'_2],B'[b'_1,b'_2],C'[c'_1,c'_2]") obrazy bodov
obrazy bodov  v rovnoľahlosti . Potom súradnice týchto bodov musia spĺňať vzťah (h), čo vedie k rovnostiam
v rovnoľahlosti . Potom súradnice týchto bodov musia spĺňať vzťah (h), čo vedie k rovnostiam
")
")
")
pre . Upravujme posledný výraz
. Upravujme posledný výraz
=s_i-ks_i+k(a_i-t(b_i-a_i))=")
![\small =s_i-ks_i+ka_i-kt(b_i-a_i))= [𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖)]−𝑘𝑡(𝑏_𝑖−𝑠_𝑖−𝑎_𝑖+𝑠_𝑖)=](https://lms.umb.sk/filter/tex/pix.php/c681a01115932036b0e5d058fc3e367d.png "\small =s_i-ks_i+ka_i-kt(b_i-a_i))= [𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖)]−𝑘𝑡(𝑏_𝑖−𝑠_𝑖−𝑎_𝑖+𝑠_𝑖)=")
![\small=𝑎′_𝑖−𝑘𝑡[(𝑏_𝑖−𝑠_𝑖)−(𝑎_𝑖−𝑠_𝑖)]=](https://lms.umb.sk/filter/tex/pix.php/52d68a8f94debc432367bf18d957ad68.png "\small=𝑎′_𝑖−𝑘𝑡[(𝑏_𝑖−𝑠_𝑖)−(𝑎_𝑖−𝑠_𝑖)]=")
![\small=𝑎′_𝑖−𝑡[(𝑠_𝑖+𝑘(𝑏_𝑖−𝑠_𝑖))−(𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖))]=](https://lms.umb.sk/filter/tex/pix.php/6b742adedf4d1e34816b71e1be573abd.png "\small=𝑎′_𝑖−𝑡[(𝑠_𝑖+𝑘(𝑏_𝑖−𝑠_𝑖))−(𝑠_𝑖+𝑘(𝑎_𝑖−𝑠_𝑖))]=")
![\small=𝑎′_𝑖+𝑡[𝑏′_𝑖−𝑎′_𝑖]](https://lms.umb.sk/filter/tex/pix.php/a95d131333c85242a71483af33b7ce7f.png "\small=𝑎′_𝑖+𝑡[𝑏′_𝑖−𝑎′_𝑖]") .
.
Dostali sme výraz, ktorý nám hovorí, že obraz bodu v zobrazení
bodu v zobrazení ") leží na priamke určenej
bodmi
leží na priamke určenej
bodmi  . Odkiaľ vyplýva, že zobrazenie zachováva kolineárnosť a preto je afinným zobrazením.
. Odkiaľ vyplýva, že zobrazenie zachováva kolineárnosť a preto je afinným zobrazením.
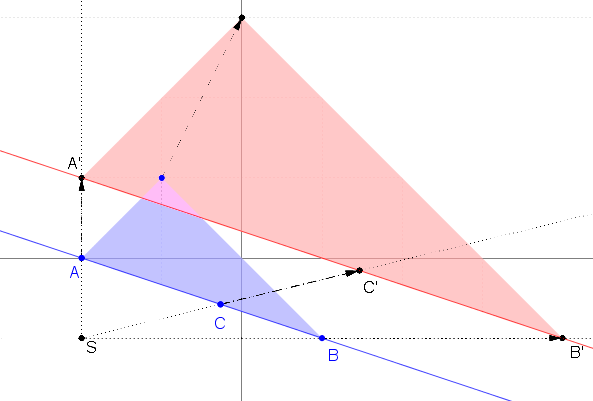
Syntetický (konštrukčný) dôkaz tvrdenia, že rovnoľahlosť zachováva kolineárnosť je pomerne jednoduchý. Stačí využiť vlastnosť, že v rovnoľahlosti sa rovnobežnosť zachováva. Pozrite si nasledujúci obrázok. Vlastnosť zachovania kolineárnosti vyplýva z podobnosti trojuholníkov a
a  .
.
Rovnoľahlosť
v euklidovskej rovine bodu priraďuje bod taký, že pre deliaci pomer bodov platí . Z definície deliaceho pomeru dostaneme vzťah(h)
,
kde
je zvolený stred rovnoľahlosti a je reálny koeficient.
V prvom kroku musíme ukázať (dokázať), že obrazom troch kolineárnych bodov v rovnoľahlosti sú opäť tri kolineárne body. Najskôr dokážeme toto tvrdenie analyticky.
Nech
sú ľubovoľné tri navzájom rôzne kolineárne body. Dvomi bodmi je určená práve jediná priamka . Podľa predpokladu bod je bodom priamky . V takom prípade existuje parameter taký, že platia rovnosti
,.Označme
obrazy bodov v rovnoľahlosti . Potom súradnice týchto bodov musia spĺňať vzťah (h), čo vedie k rovnostiam
pre
. Upravujme posledný výraz
.
Dostali sme výraz, ktorý nám hovorí, že obraz
bodu v zobrazení leží na priamke určenej
bodmi . Odkiaľ vyplýva, že zobrazenie zachováva kolineárnosť a preto je afinným zobrazením.
Syntetický (konštrukčný) dôkaz tvrdenia, že rovnoľahlosť zachováva kolineárnosť je pomerne jednoduchý. Stačí využiť vlastnosť, že v rovnoľahlosti sa rovnobežnosť zachováva. Pozrite si nasledujúci obrázok. Vlastnosť zachovania kolineárnosti vyplýva z podobnosti trojuholníkov
a .
Vzťah (h) je vlastne parametrické vyjadrenie a predstavuje transformáciu roviny  , ktorá bodu
, ktorá bodu ![\small X[x,y] \in \mathbb E_2](https://lms.umb.sk/filter/tex/pix.php/e08e134049c7de5555f4ceb42445fae2.png "\small X[x,y] \in \mathbb E_2") v rovnoľahlosti priradí bod
v rovnoľahlosti priradí bod
![\small X'[x',y'] \in \mathbb E_2](https://lms.umb.sk/filter/tex/pix.php/95b6089b0fb9d1a688d01934e8311f0f.png "\small X'[x',y'] \in \mathbb E_2") . Tento vzťah môžeme po jednoduchej úprave upraviť na sústavu dvoch rovníc o dvoch neznámych
. Tento vzťah môžeme po jednoduchej úprave upraviť na sústavu dvoch rovníc o dvoch neznámych 

 ,
,
kde=s_1 (1-k);𝑜′_2=𝑠_2 (1-k)") .
.
Usporiadaná dvojica![\small [s_1(1-k),𝑠_2(1-k)]](https://lms.umb.sk/filter/tex/pix.php/2f077ed49890c27918ec06940cf36776.png "\small [s_1(1-k),𝑠_2(1-k)]") predstavuje súradnice obrazu počiatku
predstavuje súradnice obrazu počiatku ![\small O[0,0]](https://lms.umb.sk/filter/tex/pix.php/ab786f1f1348064c3558f8b3acc41e8c.png "\small O[0,0]") v rovnoľahlosti .
K dôkazu stačí dosadiť súradnice začiatku do vzťahu (h).
v rovnoľahlosti .
K dôkazu stačí dosadiť súradnice začiatku do vzťahu (h).
Preskúmajme aké budú obrazy súradnicových ortonormálnych vektorov![\small \vec e_1=E_1-O=[1,0];\vec e_2=E_2-O=[0,1]](https://lms.umb.sk/filter/tex/pix.php/65697fba787ddf89773c3cd0e64c3e7b.png "\small \vec e_1=E_1-O=[1,0];\vec e_2=E_2-O=[0,1]") v rovnoľahlosti . Dosadením súradníc
bodov
v rovnoľahlosti . Dosadením súradníc
bodov  do vzťahu (h) dostaneme pre obrazy
do vzťahu (h) dostaneme pre obrazy 
![\small E_1'=[k+s_1(1-k),s_2(1-k)],E_2'=[s_1(1-k),k+s_2(1-k)]](https://lms.umb.sk/filter/tex/pix.php/a57bd414561b5998b36d7af96b142cda.png "\small E_1'=[k+s_1(1-k),s_2(1-k)],E_2'=[s_1(1-k),k+s_2(1-k)]") ,
,
po dosadení súradníc![\small O'[s_1(1-k),𝑠_2(1-k)]](https://lms.umb.sk/filter/tex/pix.php/2d7c09fd2b900d768d74871f7bc77ed7.png "\small O'[s_1(1-k),𝑠_2(1-k)]") do rozdielov
do rozdielov  dostaneme súradnice obrazov
dostaneme súradnice obrazov 
![\small \vec e_1'=([k+s_1(1-k)]-[s_1(1-k)],[s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(k,0)};\\ \small \vec e_2'=([s_1(1-k)]-[s_1(1-k)],[k+s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(0,k)}](https://lms.umb.sk/filter/tex/pix.php/e7a44d83fd3a9987dbebea6aff9a1390.png "\small \vec e_1'=([k+s_1(1-k)]-[s_1(1-k)],[s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(k,0)};\\ \small \vec e_2'=([s_1(1-k)]-[s_1(1-k)],[k+s_2(1-k)]-[𝑠_2(1-k)])=\pmb{(0,k)}")
Súradnice obrazov súradnicových ortonormálnych vektorov sú závisé len od koeficienta .
.
V súlade s definíciou analytického vyjadrenia afinného zobrazenia môžeme vyjadriť rovnoľahlosť v rovine pomocou rozšíreného maticového tvaru takto:
v rovine pomocou rozšíreného maticového tvaru takto:
 =
\left(\begin{array}{} k & 0 & o'_1 \\ 0 & k & o'_2 \\ 0 & 0 & 1 \\ \end{array} \right)
\times
\left( \begin{array}{} x \\ y \\ 1 \end{array} \right)") .
.
, ktorá bodu v rovnoľahlosti priradí bod
. Tento vzťah môžeme po jednoduchej úprave upraviť na sústavu dvoch rovníc o dvoch neznámych
,
kde
.
Usporiadaná dvojica
predstavuje súradnice obrazu počiatku v rovnoľahlosti .
K dôkazu stačí dosadiť súradnice začiatku do vzťahu (h).
Preskúmajme aké budú obrazy súradnicových ortonormálnych vektorov
v rovnoľahlosti . Dosadením súradníc
bodov do vzťahu (h) dostaneme pre obrazy
,
po dosadení súradníc
do rozdielov dostaneme súradnice obrazov
Súradnice obrazov súradnicových ortonormálnych vektorov sú závisé len od koeficienta
.
V súlade s definíciou analytického vyjadrenia afinného zobrazenia môžeme vyjadriť rovnoľahlosť
v rovine pomocou rozšíreného maticového tvaru takto:
.
Poznámky.
- Maticu
") nazývame matica afinného zobrazenia (rovnoľahlosti), pričom prvky prvého (resp. druhého) stĺpca tejto matice predstavujú súradnice vektora
nazývame matica afinného zobrazenia (rovnoľahlosti), pričom prvky prvého (resp. druhého) stĺpca tejto matice predstavujú súradnice vektora  (resp. vektora
(resp. vektora  ), ktorý je obrazom vektora
), ktorý je obrazom vektora  (resp. vektora
(resp. vektora  ) v danej rovnoľahlosti. V rovnoľahlosti rovnobežnosť sa zachováva, preto vektory a
) v danej rovnoľahlosti. V rovnoľahlosti rovnobežnosť sa zachováva, preto vektory a  sú lineárne závislé, pričom
sú lineárne závislé, pričom  .
. - V transformačných rovniciach koeficienty pri neznámej
 (resp.
(resp.  ) predstavujú súradnice vektora
(resp. vektora
) predstavujú súradnice vektora
(resp. vektora  ).
).
Cvičenie.
V rovnoľahlosti, ktorá zobrazuje![\small A[-2,0] \rightarrow A'[-2,1],B[1,-1] \rightarrow B'[4,-1],C[-1,1] \rightarrow C'[0,3]](https://lms.umb.sk/filter/tex/pix.php/36c60da4c8ebc2dcdbeffef4aa2df2b6.png "\small A[-2,0] \rightarrow A'[-2,1],B[1,-1] \rightarrow B'[4,-1],C[-1,1] \rightarrow C'[0,3]") nájdite obrazy
začiatku a jednotkových vektorov
nájdite obrazy
začiatku a jednotkových vektorov  ,
kde
,
kde ![\small E_1=[1,0],E_2=[0,1]](https://lms.umb.sk/filter/tex/pix.php/9348bdf47b8863f702b935e218adefe1.png "\small E_1=[1,0],E_2=[0,1]") .
.
V rovnoľahlosti, ktorá zobrazuje
nájdite obrazy
začiatku a jednotkových vektorov ,
kde .
Riešenie. Využite riešenie príkladu "Tri body" v kapitole "Afinné zobrazenie". Pozrite si grafické riešenie
Tu.
 \)
\)