Afinná geometria - zobrazenia, vizualizácie, aplikácie
Požiadavky na absolvovanie
Zhodnostné zobrazenia
Osová súmernosť
Osová súmernosť ako afinné zhodnostné zobrazenie.
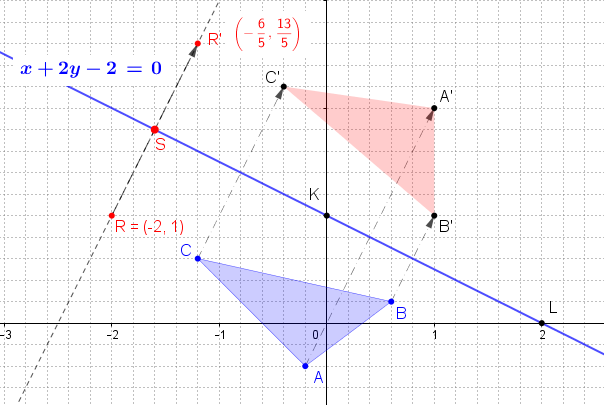
Z kurzu Planimetria vieme, že osová súmernosť je jednoznačne určená osou súmernosti a dvojicou odpovedajúcich bodov. Ak si zvolíme dva rôzne body na osi súmernosti, tak osovú súmernosť
môžeme jednoznačne určiť dvomi Samodružnými bodmi a jednou dvojicou odpovedajúcich si bodov. Túto vlastnosť neskôr výhodne využijeme pri hľadaní transformačných rovníc osovej súmernosti.
Osová súmernosť - ukážka.
- Na určenie transformačných rovníc osovej súmernosti určenej osou súmernosti
 budeme potrebovať obrazy
troch rôznych bodov a ich obrazy v danej osovej súmernosti.
budeme potrebovať obrazy
troch rôznych bodov a ich obrazy v danej osovej súmernosti.
Najvýhodnejšie bude ak si zvolíme dva rôzne samodružné body a nejaký tretí bod tak, aby všetky tri boli nekolineárne. Takými bodmi pri takto danej osi súmernosti sú napríklad- Dva body na osi súmernosti
 , pre ktoré platí
, pre ktoré platí ![\small A=[0,\frac{-c}{b}]](https://lms.umb.sk/filter/tex/pix.php/dd67a08dcc145362b583cb2c84e94ce1.png "\small A=[0,\frac{-c}{b}]") a
a ![\small B=[\frac{-c}{a},0]](https://lms.umb.sk/filter/tex/pix.php/b35dafcb91a2f8e7f3b1e89aeb667a55.png "\small B=[\frac{-c}{a},0]") ,
prípad ak jeden z koeficientov
,
prípad ak jeden z koeficientov  je rovný nule sa rieši zvlášť. bodu
je rovný nule sa rieši zvlášť. bodu
- Tretí bod nech je počiatok súradnej sústavy
![\small O=[0,0]](https://lms.umb.sk/filter/tex/pix.php/e207eadb01df7727b1ae1c147893e113.png "\small O=[0,0]") . Súradnice
. Súradnice  jeho obrazu
jeho obrazu ![\small O'=[p,q]](https://lms.umb.sk/filter/tex/pix.php/7843bc3154f974357ba963a4d076a5bc.png "\small O'=[p,q]") určíme napríklad pomocou bodu
určíme napríklad pomocou bodu ![\small X_0[x_0,y_0]](https://lms.umb.sk/filter/tex/pix.php/1ce455917dd1618d7f5c9cad022a096b.png "\small X_0[x_0,y_0]") .
Tento bod je spoločným bodom danej priamky
.
Tento bod je spoločným bodom danej priamky  a kolmice
a kolmice  . Pre jeho súradnice platí:
. Pre jeho súradnice platí:
 .
Vektor
.
Vektor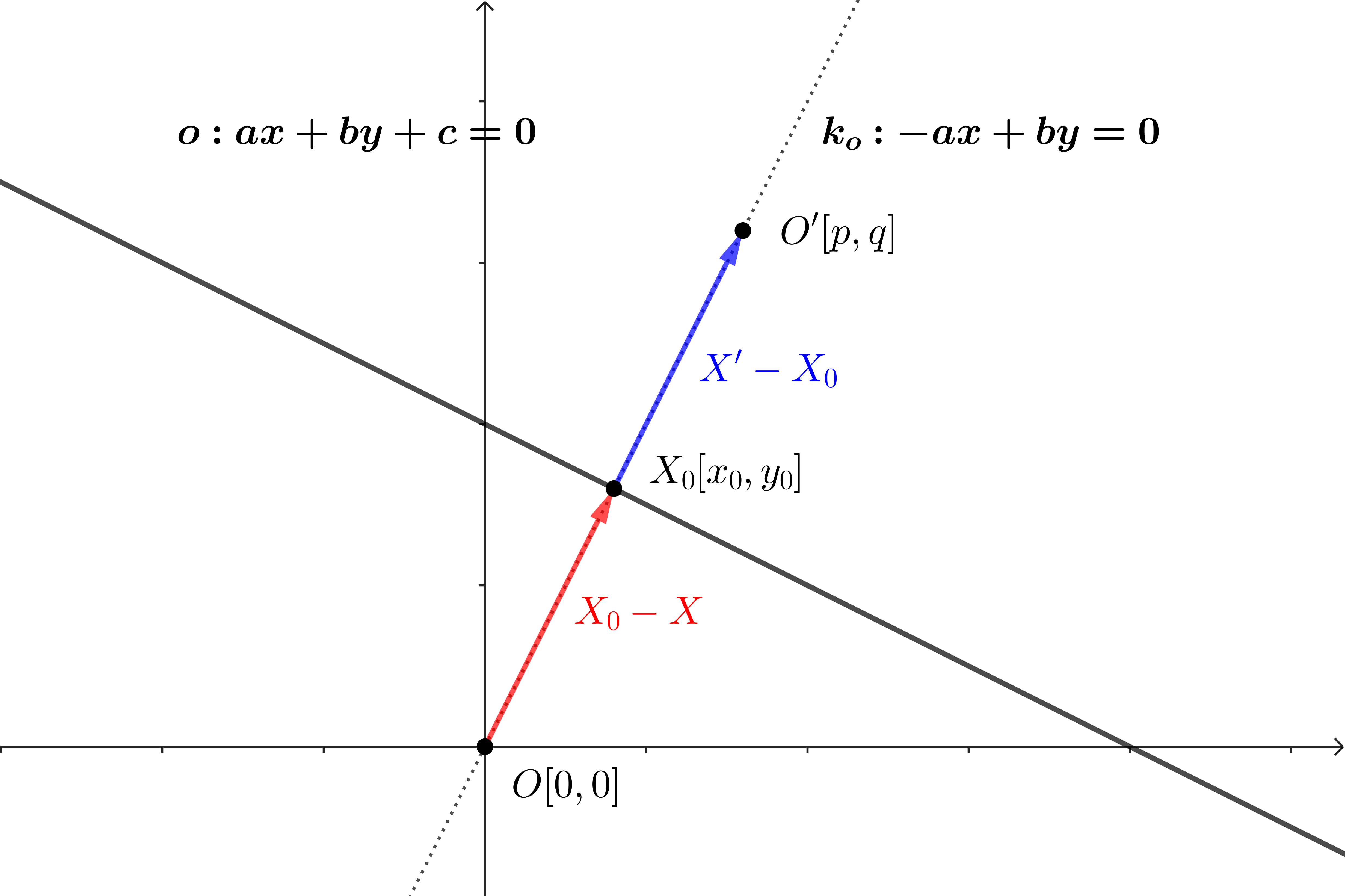
Obraz počiatku súradnej sústavy v osovej súmernosti. je
je  násobkom vektora
násobkom vektora  . Odkiaľ dostávame súradnice obrazu počiatku v osovej súmernosti:
. Odkiaľ dostávame súradnice obrazu počiatku v osovej súmernosti:
 .
.
- Dva body na osi súmernosti
- Potom dosadíme súradnice obrazov
![\small O'=[p,q],A=A'=[0,\frac{-c}{b}],B=B'=[\frac{-c}{a},0]](https://lms.umb.sk/filter/tex/pix.php/688ea304ba4f8441ab50a3012a5b3f1b.png "\small O'=[p,q],A=A'=[0,\frac{-c}{b}],B=B'=[\frac{-c}{a},0]") do vzťahov
do vzťahov
 pričom musí platiť
pričom musí platiť
 .
.
Dostaneme maticovú rovnicu v tvare . (pozrite tiež príklad "
Tri body"
v kapitole Afinné zobrazenie) a využitím
Matrix calculator dostaneme
. (pozrite tiež príklad "
Tri body"
v kapitole Afinné zobrazenie) a využitím
Matrix calculator dostaneme
") .
.") =
=,")
odkiaľ už ľahko určíme hľadané transformačné rovnice.
Tvrdenie (Obraz bodu v osovej súmernosti ") ).
).
Transformačné rovnice pre osovú súmernosť určenú osou súmernosti:
(OS) x\;-\;\;\left( \frac{2ab}{a^2+b^2} \right) y-\frac{2ac}{a^2+b^2} , \\
y'=\left(-\frac{2ab}{a^2+b^2} \right) x\;\;\;+\left( \frac{a^2-b^2}{a^2+b^2} \right)y-\frac{2bc}{a^2+b^2}
\end{array}.")
).Transformačné rovnice pre osovú súmernosť určenú osou súmernosti
:
(OS)
Cvičenie.
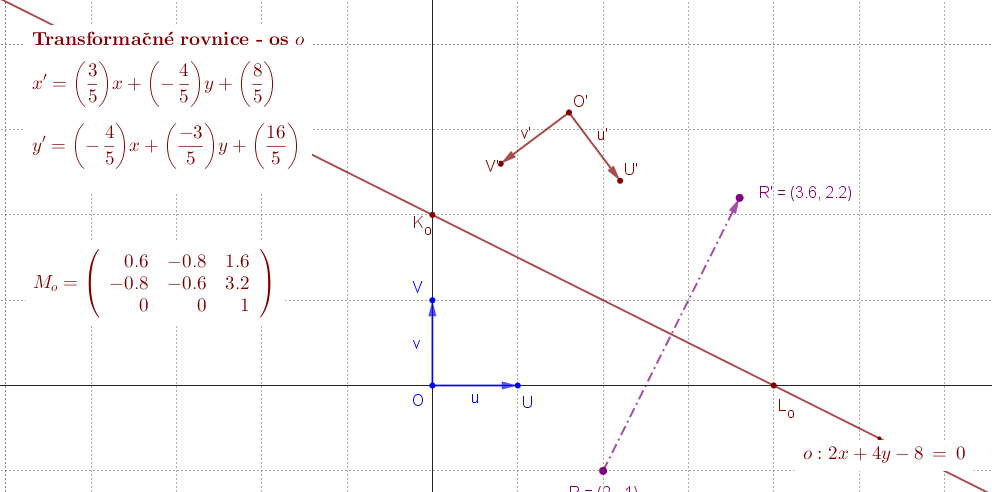
Určte analytické vyjadrenie osovej súmernosti určenej osou , ktorá je určená rovnicou
, ktorá je určená rovnicou  .
.
Určte analytické vyjadrenie osovej súmernosti určenej osou
, ktorá je určená rovnicou .
Riešenie.
Po určení![\small O'=[\frac{4}{5},\frac{8}{5}]](https://lms.umb.sk/filter/tex/pix.php/fe03ff2bb6915ea8b5b1fb9e7570b908.png "\small O'=[\frac{4}{5},\frac{8}{5}]") a priesečníkov so súradnými osami
a priesečníkov so súradnými osami ![\small A'=[0,1],B'=[2,0]](https://lms.umb.sk/filter/tex/pix.php/7b5de48e251f867c8cf2cc5ec11ca438.png "\small A'=[0,1],B'=[2,0]") a dostaneme pre maticu vzorov
a maticu obrazov
a dostaneme pre maticu vzorov
a maticu obrazov
") ;
;
") ;
;
")
odkiaľ

\times \left(\begin{matrix}
0 & 1 & 0 \\
\frac{1}{2} & 0 & 0 \\
\frac{-1}{2} & -1 & 1
\end{matrix}\right)=
\left(\begin{matrix}
\frac{3}{5} & \frac{-4}{5} & \frac{4}{5} \\
\frac{-4}{5} & \frac{-3}{5} & \frac{8}{5} \\
0 & 0 & 1
\end{matrix}\right),")
čo predstavuje transformačné rovnice pre skúmanú osovú súmernosť
 .
.
Po určení
a priesečníkov so súradnými osami a dostaneme pre maticu vzorov
a maticu obrazov
;
;
odkiaľ
čo predstavuje transformačné rovnice pre skúmanú osovú súmernosť
.
Osová súmernosť je oproti ostatným zhodným zobrazeniam niečím výnimočná. Má zaujímavú vlastnosť, skladaním osových súmerností sa dajú získať
všetky zhodné zobrazenia v rovine.
V applete "Skladanie osových súmerností" sú osi súmerností navzájom kolmé. Preto ich zložením bude stredová súmernosť so stredom  . Matica
zloženého zobrazenia
. Matica
zloženého zobrazenia  je súčinom transformačnej matice osovej súmernosti
je súčinom transformačnej matice osovej súmernosti  a transformačnej matice osovej súmernosti
a transformačnej matice osovej súmernosti
 .
.
Ak označíme súradnice stredu ako
ako ![\small S=[s_1,s_2]](https://lms.umb.sk/filter/tex/pix.php/5306fb95c5a732b58ea54862d8e783bf.png "\small S=[s_1,s_2]") , tak rozšírená matica stredovej súmernosti bude mať tvar
, tak rozšírená matica stredovej súmernosti bude mať tvar
,") kde
kde  sú súradnice obrazu počiatku v skúmanej stredovej súmernosti. V nasledujúcej kapitole dokážeme túto vlastnosť pomocou skladania posunutia a stredovej súmernosti so stredom v pčiatku súradnej sústavy.
sú súradnice obrazu počiatku v skúmanej stredovej súmernosti. V nasledujúcej kapitole dokážeme túto vlastnosť pomocou skladania posunutia a stredovej súmernosti so stredom v pčiatku súradnej sústavy.
Presvedčte sa že hodnoty sa nemenia pri zmene polohy osí súmerností za predpokladu, že kolmosť je invariantná voči zmene polohy. Nastavte osi súmernosti tak, aby
sa nemenia pri zmene polohy osí súmerností za predpokladu, že kolmosť je invariantná voči zmene polohy. Nastavte osi súmernosti tak, aby  .
.
. Matica
zloženého zobrazenia je súčinom transformačnej matice osovej súmernosti a transformačnej matice osovej súmernosti
.
Ak označíme súradnice stredu
ako , tak rozšírená matica stredovej súmernosti bude mať tvar
sú súradnice obrazu počiatku v skúmanej stredovej súmernosti. V nasledujúcej kapitole dokážeme túto vlastnosť pomocou skladania posunutia a stredovej súmernosti so stredom v pčiatku súradnej sústavy.Presvedčte sa že hodnoty
sa nemenia pri zmene polohy osí súmerností za predpokladu, že kolmosť je invariantná voči zmene polohy. Nastavte osi súmernosti tak, aby .
 \)
\)