Afinná geometria - zobrazenia, vizualizácie, aplikácie
Abschlussbedingungen
Analytické vyjadrenie
Obraz troch bodov
V tejto podkapitole rozvíjame praktický aspekt afinného zobrazenia, konkrétne jeho určenie pomocou obrazov troch lineárne nezávislých bodov. Ide o aplikáciu vety o jednoznačnosti afinného zobrazenia.
Nech je daná ") - tica bodov
- tica bodov  v euklidovskom priestore
v euklidovskom priestore  taká, že
taká, že ") - tica vektorov
- tica vektorov  so zamerania
so zamerania ") je nezávislá. V tomto prípade sústava
je nezávislá. V tomto prípade sústava  tvorí repér tohto priestoru. Takejto - tici bodov budeme hovoriť, že je lineárne nezávislá.
tvorí repér tohto priestoru. Takejto - tici bodov budeme hovoriť, že je lineárne nezávislá.
- tica bodov v euklidovskom priestore taká, že - tica vektorov so zamerania je nezávislá. V tomto prípade sústava tvorí repér tohto priestoru. Takejto - tici bodov budeme hovoriť, že je lineárne nezávislá.
Vo vete "Jednoznačnosť afinného zobrazenia" sme dokázali, že afinné zobrazenie  je jednoznačne určené obrazmi
je jednoznačne určené obrazmi  lineárne nezávislých bodov euklidovského priestoru .Dôkaz tohto tvrdenia nájdete aj v práci [Chalmoviansky, 2022].
lineárne nezávislých bodov euklidovského priestoru .Dôkaz tohto tvrdenia nájdete aj v práci [Chalmoviansky, 2022].
V ďalšej časti sa zameriame na určenie transformačných rovníc afinného zobrazenia v euklidovskej rovine , v ktorom sú dané dve trojice odpovedajúcich nekolineárnych bodov. Začneme trojicami, ktoré vyhovujú rovnoľahlosti, čo nám uľahčí kontrolu správnosti určenia transformačných rovníc.
, v ktorom sú dané dve trojice odpovedajúcich nekolineárnych bodov. Začneme trojicami, ktoré vyhovujú rovnoľahlosti, čo nám uľahčí kontrolu správnosti určenia transformačných rovníc.
je jednoznačne určené obrazmi lineárne nezávislých bodov euklidovského priestoru .Dôkaz tohto tvrdenia nájdete aj v práci [Chalmoviansky, 2022].
V ďalšej časti sa zameriame na určenie transformačných rovníc afinného zobrazenia v euklidovskej rovine
, v ktorom sú dané dve trojice odpovedajúcich nekolineárnych bodov. Začneme trojicami, ktoré vyhovujú rovnoľahlosti, čo nám uľahčí kontrolu správnosti určenia transformačných rovníc.
Cvičenie.
Určte transformačné rovnice afinného zobrazenia , v ktorom
, v ktorom
 \rightarrow A'(4,2);\; \;B(\frac{3}{2},-\frac{3}{2}) \rightarrow B'(\frac{11}{4},-\frac{1}{2}),\; \;C(-3,0) \rightarrow C'(2,4)") .
.
Určte transformačné rovnice afinného zobrazenia
, v ktorom
.
Riešenie.
Riešenie pomocou rozšírených matíc sme popísali v predchádzajúcich kapitolách. Teraz pre úplnosť ukážeme aj riešenie, v ktorom sa budeme opierať o sústavu 6 rovníc o 6 neznámych. Takéto riešenie je však technicky náročnejšie a dosť nepraktické.
Pre bod v rovine platí, že je lineárnou kombináciou bodov
v rovine platí, že je lineárnou kombináciou bodov  ;B(\frac{3}{2},-\frac{3}{2});C(-3,0)") ,
preto platí
,
preto platí
+b(\frac{3}{2},-\frac{3}{2})+c(-3,0)") , pričom
, pričom 
V kapitole "Afinné zobrazenie" sme ukázali, že transformačné rovnice afinného zobrazenia v euklidovskom priestore majú tvar
majú tvar

kde sú súradnice obrazov vektorov bázy
sú súradnice obrazov vektorov bázy  a súradnice obrazu začiatku repéra
a súradnice obrazu začiatku repéra  . Dosaďme súradnice
bodov
. Dosaďme súradnice
bodov  do týchto transformačných rovníc. Po úprave dostaneme dve rovnice o 6 neznámych . Konkrétne to budú rovnice
do týchto transformačných rovníc. Po úprave dostaneme dve rovnice o 6 neznámych . Konkrétne to budú rovnice

Postupne ak dosadíme súradnice ďalších bodov dostaneme ďalšie 4 rovnice.
dostaneme ďalšie 4 rovnice.



Spolu je to sústava 6 lineárnych rovníc, ktorá vzhľadom na zadanie (nekolineárne body) bude mať práve jedno riešenie. Vypíšte všetkých 6 rovníc a potom vyriešte túto sústavu.
Riešenie pomocou rozšírených matíc sme popísali v predchádzajúcich kapitolách. Teraz pre úplnosť ukážeme aj riešenie, v ktorom sa budeme opierať o sústavu 6 rovníc o 6 neznámych. Takéto riešenie je však technicky náročnejšie a dosť nepraktické.
Pre bod
v rovine platí, že je lineárnou kombináciou bodov ,
preto platí
, pričom V kapitole "Afinné zobrazenie" sme ukázali, že transformačné rovnice afinného zobrazenia v euklidovskom priestore
majú tvar
kde
sú súradnice obrazov vektorov bázy a súradnice obrazu začiatku repéra . Dosaďme súradnice
bodov do týchto transformačných rovníc. Po úprave dostaneme dve rovnice o 6 neznámych . Konkrétne to budú rovnice
Postupne ak dosadíme súradnice ďalších bodov
dostaneme ďalšie 4 rovnice.
Spolu je to sústava 6 lineárnych rovníc, ktorá vzhľadom na zadanie (nekolineárne body) bude mať práve jedno riešenie. Vypíšte všetkých 6 rovníc a potom vyriešte túto sústavu.
Vzhľadom na to, že poznáme obrazy troch lineárne nezávislých bodov, môžeme ľubovoľný bod roviny vyjadriť ako afinnú kombináciu týchto bodov. Následne aplikujeme rovnakú kombináciu na ich obrazy, čím získame obraz daného bodu v afinnom zobrazení. Tento prístup je didakticky výhodný, pretože umožňuje jasne sledovať závislosť výpočtu od barycentrických súradníc a zároveň vedie k elegantnému vyjadreniu výsledku prostredníctvom maticového počtu – ten je navyše podporený aj v prostredí GeoGebry.
Riešenie danej sústavy 6 rovníc so 6 neznámymi s pravou stranou pomocou GeoGebry:
 & 0 & \left(-1,5\right) & 0 & 1 & 0 \\
0 & \left(1,5\right) & 0 & \left(-1,5\right) & 0 & 1 \\
-3 & 0 & 0 & 0 & 1 & 0 \\
0 & -3 & 0 & 0 & 0 & 1
\end{matrix}\right)
\times
\left(\begin{matrix}
a \\
b \\
c \\
d \\
p \\
q
\end{matrix}\right)=
\left(\begin{matrix}
4 \\
2 \\
2,75 \\
-0,5\\
2 \\
4
\end{matrix}\right)")
Výsledok.=
\left(\begin{matrix}
-0,25 \\
-1 \\
-1,25\\
0 \\
1,25\\
1
\end{matrix}\right)")
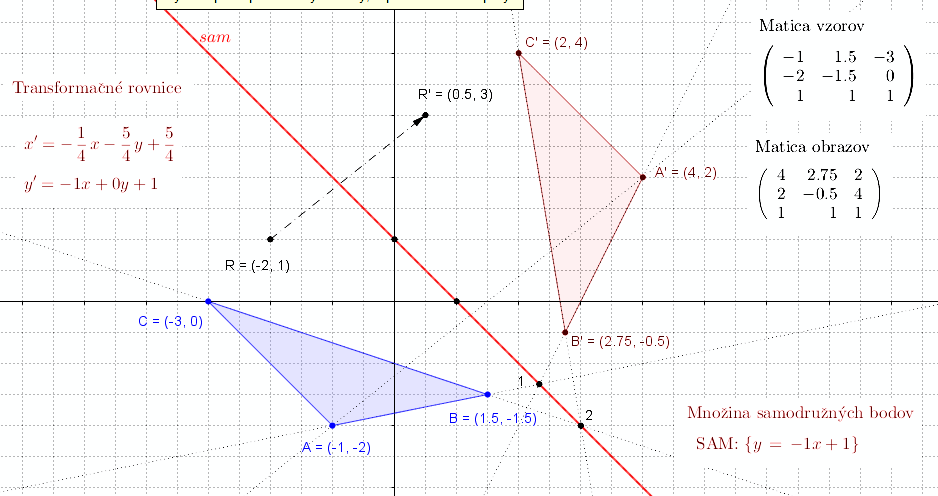
Transformačné rovnice skúmaného afinného zobrazenia sú prezentované na ďalšom obrázku v ľavej časti obrázka.
Matica zobrazenia v tomto príklade má tvar
v tomto príklade má tvar ") ,
čo predstavuje osovú afinitu.
,
čo predstavuje osovú afinitu.
Riešenie danej sústavy 6 rovníc so 6 neznámymi s pravou stranou pomocou GeoGebry:
Výsledok.
Transformačné rovnice skúmaného afinného zobrazenia sú prezentované na ďalšom obrázku v ľavej časti obrázka.
Matica zobrazenia
 v tomto príklade má tvar ,
čo predstavuje osovú afinitu.
v tomto príklade má tvar ,
čo predstavuje osovú afinitu.
Cvičenie - nájdite chybu.
Pozrite si geometrický spôsob riešenia podobnej úlohy, v ktorom sa využíva program GeoGebra. Otvorte si interaktívnu konštrukciu Tu.
V tejto konštrukcii je nesprávne zadaná hodnota v matici vzorov. Nájdite túto zle zadanú hodnotu a opravte ju.
Pozrite si geometrický spôsob riešenia podobnej úlohy, v ktorom sa využíva program GeoGebra. Otvorte si interaktívnu konštrukciu Tu.
V tejto konštrukcii je nesprávne zadaná hodnota v matici vzorov. Nájdite túto zle zadanú hodnotu a opravte ju.
 \)
\)