Afinná geometria - zobrazenia, vizualizácie, aplikácie
Požiadavky na absolvovanie
Afinné zobrazenie
V ďalších kapitolách sa budeme zaoberať len euklidovským priestorom  so zameraním
so zameraním ") . Zameriame sa prevažne len na dvojrozmerný a trojrozmerný euklidovský priestor - rovinu
. Zameriame sa prevažne len na dvojrozmerný a trojrozmerný euklidovský priestor - rovinu  a priestor
a priestor  . Pripomíname, že v euklidovskom priestore je definovaný skalárny súčin.
. Pripomíname, že v euklidovskom priestore je definovaný skalárny súčin.
Táto kapitola sa venuje definícii, vlastnostiam a analytickému opisu afinných zobrazení medzi doma euklidovskými priestormi. Podávame výklad v súlade s moderným prístupom: kombinácia syntetickej a analytickej geometrie. Zameriame sa aj na prepojenie s barycentrickým vyjadrením a vlastnosťami lineárneho zobrazenia. Príklady zahŕňajú výpočty s transformačnými maticami a konkrétne aplikácie.
so zameraním . Zameriame sa prevažne len na dvojrozmerný a trojrozmerný euklidovský priestor - rovinu a priestor . Pripomíname, že v euklidovskom priestore je definovaný skalárny súčin.
Táto kapitola sa venuje definícii, vlastnostiam a analytickému opisu afinných zobrazení medzi doma euklidovskými priestormi. Podávame výklad v súlade s moderným prístupom: kombinácia syntetickej a analytickej geometrie. Zameriame sa aj na prepojenie s barycentrickým vyjadrením a vlastnosťami lineárneho zobrazenia. Príklady zahŕňajú výpočty s transformačnými maticami a konkrétne aplikácie.
Definícia (Afinné zobrazenie).
Nech sú euklidovské podpriestory priestoru . Zobrazenie
sú euklidovské podpriestory priestoru . Zobrazenie

sa nazýva afinné zobrazenie (AZ), ak obrazom ľubovoľných troch kolineárnych bodov sú buď totožné body, alebo kolineárne body, pričom ich deliaci pomer sa zachováva.
Nech
sú euklidovské podpriestory priestoru . Zobrazenie
sa nazýva afinné zobrazenie (AZ), ak obrazom ľubovoľných troch kolineárnych bodov sú buď totožné body, alebo kolineárne body, pričom ich deliaci pomer sa zachováva.
Z definície vyplýva, že afinné zobrazenie má vlastnosť lineárneho zobrazenia. Afinné zobrazenie je také, ktoré zachováva afinné kombinácie bodov.
Vo všeobecnosti platí nasledujúca veta "Maticové vyjadrenie AZ". Pozrite si tiež vetu "Obraz bodu v afinnom zobrazení" v kapitole Analytické vyjadrenie.
Vo všeobecnosti platí nasledujúca veta "Maticové vyjadrenie AZ". Pozrite si tiež vetu "Obraz bodu v afinnom zobrazení" v kapitole Analytické vyjadrenie.
Veta (Maticové vyjadrenie AZ).
Afinné zobrazenie medzi euklidovskými podpriestormi priestoru
medzi euklidovskými podpriestormi priestoru  možno vyjadriť ako
možno vyjadriť ako
 =\small \mathbb{A} \small X + \normalsize b") ,
,
ktoré bodu priradí bod
priradí bod ") , kde
, kde  je lineárna matica (zobrazenie medzi vektorovými podpriestormi
je lineárna matica (zobrazenie medzi vektorovými podpriestormi ") a
a ") ); a
); a  je pevný vektor (posunutie), ktorý je určený obrazom počiatku repéru v zobrazení .
je pevný vektor (posunutie), ktorý je určený obrazom počiatku repéru v zobrazení .
Afinné zobrazenie
medzi euklidovskými podpriestormi priestoru možno vyjadriť ako
,
ktoré bodu
priradí bod , kde je lineárna matica (zobrazenie medzi vektorovými podpriestormi
a ); a je pevný vektor (posunutie), ktorý je určený obrazom počiatku repéru v zobrazení .
Dôkaz .
Uvedieme len hlavné myšlienky dôkazu.
Uvedieme len hlavné myšlienky dôkazu.
-
Zrejme afinné zobrazenie zachováva afinné kombinácie, teda musí plaitť
Y= \lambda f(X)+(1-\lambda )Y")
pre ľubovoľné body euklidovského priestoru .
euklidovského priestoru . - Uvažujme o asociovanom zobrazení
 medzi vektorovými priestormi
medzi vektorovými priestormi , V_s(\mathbb R)") (zamerania afinných podpriestorov ). Potom pre bod
(zamerania afinných podpriestorov ). Potom pre bod  a zobrazenie bude platiť (načrtnite si obrázok)
a zobrazenie bude platiť (načrtnite si obrázok)
=f(O+\vec x)-f(O)") .
.
- Po dosadení a vhodných úpravách dostaneme
=f(O+\vec x)=f^*(\vec x)+f(O)") ,
,
čo v súradniciach predstavuje
.
Vo všeobecnosti môžeme konštatovať, že afinné zobrazenie zachováva nasledovné vlastnosti:
- Lineárnosť.
Afinné zobrazenie zachováva lineárne kombinácia bodov.
Ak platí
zachováva lineárne kombinácia bodov.
Ak platí
 ,
,
tak musí platiť aj
 ,
,
kde=P', \normalsize f(\small P_i)=P'_i, \normalsize α_1+ . . . + α_k = 1") .
.
- Kolineárnosť .
Afinné zobrazenie zachováva kolineárnosť bodov. Teda ak tri body sú kolineárne pred zobrazením, zostanú kolineárne aj po zobrazení. - Deliaci pomer.
Afinné zobrazenie zachováva pomery medzi bodmi na priamke, ale nemusí zachovať vzdialenosti bodov alebo veľkosti uhlov. Teda platí:
 =\mu (\small A'B'C')") .
.
Príklad (Transformačná matica).
Afinné zobrazenie je dané maticou
je dané maticou
") a vektorom posunutia
a vektorom posunutia
") .
.
Určte súradnice obrazu bodu![\small X=[3, -1]](https://lms.umb.sk/filter/tex/pix.php/82c2685a036000613de9d90bf071295b.png "\small X=[3, -1]") . Ktorý bod sa zobrazia do bodu [9, 8] ? Určte obraz vektora
. Ktorý bod sa zobrazia do bodu [9, 8] ? Určte obraz vektora ") a tiež obrazy vektorov ortonormálnej bázy. Využite dynamický (applet) model tohto afinného zobrazenia.
a tiež obrazy vektorov ortonormálnej bázy. Využite dynamický (applet) model tohto afinného zobrazenia.
Afinné zobrazenie
je dané maticou
a vektorom posunutia
.
Určte súradnice obrazu bodu
. Ktorý bod sa zobrazia do bodu [9, 8] ? Určte obraz vektora a tiež obrazy vektorov ortonormálnej bázy. Využite dynamický (applet) model tohto afinného zobrazenia.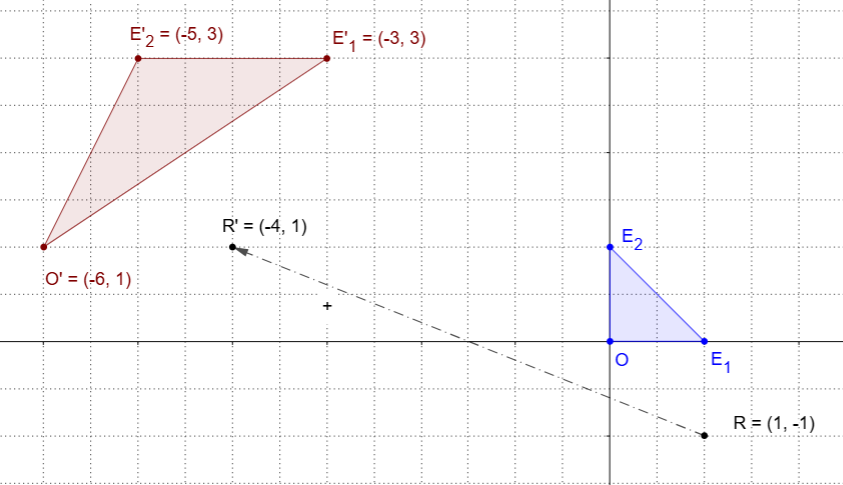
Afinné zobrazenie - transformačná matica+vektor posunutia.
Pozorujte zmeny v Transformačných rovniciach pri zmene polohy bodov
 .
.
Riešenie.
Maticové vyjadrenie tohto afinného zobrazenia bude mať tvar
=
\left(\begin{matrix}
3 & 1 \\
1 & 1
\end{matrix}\right) \times
\left(\begin{matrix}
x \\
y
\end{matrix}\right)+
\left(\begin{matrix}
-6 \\1
\end{matrix}\right)") ,
,
čo je ekvivalentné zápisu ("transformačným rovniciam")
 .
.
Teraz súradnice bodu [3, -1] dosadíme do maticového vyjadrenia (AZ) alebo použijeme transformačné rovnice a dostaneme, že bod sa zobrazí
do bodu ![\small X'=[3, 3]](https://lms.umb.sk/filter/tex/pix.php/34e2b1adda857d33d67ca56c24f2791c.png "\small X'=[3, 3]") .
.
Hľadajme, ktorý bod sa zobrazí do bodu [9 , 8]. Súradnice tohto obrazu dosadíme do transformačných rovníc za premenné . Riešením je
dvojica
. Riešením je
dvojica  .
.
Obraz vektora") určíme dvoma spôsobmi:
určíme dvoma spôsobmi:
") . Nájdenie súradníc vektorov bázy prenecchávame na čitateľa.
. Nájdenie súradníc vektorov bázy prenecchávame na čitateľa.
Maticové vyjadrenie tohto afinného zobrazenia bude mať tvar
,
čo je ekvivalentné zápisu ("transformačným rovniciam")
.
Teraz súradnice bodu [3, -1] dosadíme do maticového vyjadrenia (AZ) alebo použijeme transformačné rovnice a dostaneme, že bod
sa zobrazí
do bodu .
Hľadajme, ktorý bod sa zobrazí do bodu [9 , 8]. Súradnice tohto obrazu dosadíme do transformačných rovníc za premenné
. Riešením je
dvojica .
Obraz vektora
určíme dvoma spôsobmi:
- Pomocou obrazov jeho počiatku
![\small O=[0,0]](https://lms.umb.sk/filter/tex/pix.php/e207eadb01df7727b1ae1c147893e113.png "\small O=[0,0]") a jeho koncového bodu
a jeho koncového bodu ![\small V=[2,3]](https://lms.umb.sk/filter/tex/pix.php/8c9dc0cd8650ea995499f308e7da52f8.png "\small V=[2,3]") . Počiatok sa zorazí do bodu
. Počiatok sa zorazí do bodu ![\small O'=[-6,1]](https://lms.umb.sk/filter/tex/pix.php/2e9f346bec496d3fe7d86cd4f32bac14.png "\small O'=[-6,1]") a koncový bod
do bodu
a koncový bod
do bodu ![\small V'=[3,6]](https://lms.umb.sk/filter/tex/pix.php/30199a2eca368fd63f3cd972c57b4d88.png "\small V'=[3,6]") . Potom vektor
. Potom vektor ![\vec v'=\small ([3,6]-[-6,1]=[9,5]](https://lms.umb.sk/filter/tex/pix.php/d22e8beeaa21f83219296dca528b9a7b.png "\vec v'=\small ([3,6]-[-6,1]=[9,5]")
- Pomocou lineárnej matice ako súčin
 \times
\left(\begin{matrix}
2 \\
3
\end{matrix}\right)")
. Nájdenie súradníc vektorov bázy prenecchávame na čitateľa.
Cvičenie.
Určte obrazy súradného simplexu v afinnom zobrazení z predchádzajúceho príkladu "Transformačná matica". Pokúste sa to zovšeobecniť na simplex
v afinnom zobrazení z predchádzajúceho príkladu "Transformačná matica". Pokúste sa to zovšeobecniť na simplex  .
.
Určte obrazy súradného simplexu
v afinnom zobrazení z predchádzajúceho príkladu "Transformačná matica". Pokúste sa to zovšeobecniť na simplex .
Pomoc
- Najskôr určte súradnice obrazu počiatku
![\small O=[0,0,...,0]](https://lms.umb.sk/filter/tex/pix.php/1c70342ad1b1fae73f74d14997eac233.png "\small O=[0,0,...,0]") dosadením do vektorovej rovnice
dosadením do vektorovej rovnice
a ukážte, že![\small O'=[b_1,b_2,...,b_n]](https://lms.umb.sk/filter/tex/pix.php/2a6081a6837e7a243790d2fc7de46b17.png "\small O'=[b_1,b_2,...,b_n]") resp.
resp.  .
.
- Potom určte súradnice obrazu bodu
![\small E_1=[1,0,...,0]](https://lms.umb.sk/filter/tex/pix.php/13badf53c74c52df13187e4ef3884b93.png "\small E_1=[1,0,...,0]") , pričom využijete vlastnosť, že
, pričom využijete vlastnosť, že
 .
.
Potom ukážte, že súradnice vektora sú zhodné so prvkami prvého stĺpca matice
sú zhodné so prvkami prvého stĺpca matice  .
.
Poznámky.
- Afinné zobrazenie môže, ale nemusí, zachovávať vzdialenosti bodov a veľkosti uhlov. Ak ich zachováva, tak sa nazýva "izometria".
- V prípade izometrie transformačná matica
 je ortogonálna, pre ktorú platí:
je ortogonálna, pre ktorú platí:
 ,
,
kde je jednotková matica. V práci [PTA, 2016] nájdete dôkaz tvrdenia pre euklidovský priestor .
je jednotková matica. V práci [PTA, 2016] nájdete dôkaz tvrdenia pre euklidovský priestor . - Ak
 , tak afinnému zobrazeniu
, tak afinnému zobrazeniu  hovoríme transformácia euklidovského priestoru .
hovoríme transformácia euklidovského priestoru .
 \)
\)