Zhodnostné a podobnostné zobrazenia
Zhodnostné zobrazenia
Analytické vyjadrenia zhodnostných zobrazení
Geometrické resp. konštrukčné vlastnosti zhodnostných zobrazení nájdete
Tu.
Definícia
Zobrazenie v rovine budeme nazývať zhodnostné zobrazenie, ak pre každé dva body
v rovine budeme nazývať zhodnostné zobrazenie, ak pre každé dva body  a ich obrazy
a ich obrazy , f(Y )") platí
platí
f(Y)|") .
.
Inými slovami zhodné zobrazenia zachovávajú vzdialenosti bodov.
Zobrazenie
v rovine budeme nazývať zhodnostné zobrazenie, ak pre každé dva body
a ich obrazy platí
.
Inými slovami zhodné zobrazenia zachovávajú vzdialenosti bodov.
Tvrdenie (Afinnosť zhodnostného zobrazenia).
Každé zhodnostné zobrazenie je afinné.
je afinné.
Každé zhodnostné zobrazenie
je afinné.
Dôkaz
Treba dokázať, že zhodnostné zobrazenie spĺňa podmienku zachovania kolineárnosti a deliaceho pomeru.
Nech  sú kolineárne body
sú kolineárne body  , potom zrejme aj body (\small f(A), f(B),f(C) \) sú navzájom rôzne.
Bez ujmy na obecnosti môžeme predpokladať, že pre usporiadanie bodov
, potom zrejme aj body (\small f(A), f(B),f(C) \) sú navzájom rôzne.
Bez ujmy na obecnosti môžeme predpokladať, že pre usporiadanie bodov  platí
platí ") . Bod
. Bod  leží medzi bodmi
leží medzi bodmi  .
.
Ukážeme, že body, f(B),f(C)") sú kolineárne a zároveň platí
sú kolineárne a zároveň platí  = (f(A)f(B)f(C))") .
. Načrtnite si obrázok.
.
. Načrtnite si obrázok.
Treba dokázať, že zhodnostné zobrazenie
spĺňa podmienku zachovania kolineárnosti a deliaceho pomeru.
Nech sú kolineárne body , potom zrejme aj body (\small f(A), f(B),f(C) \) sú navzájom rôzne.
Bez ujmy na obecnosti môžeme predpokladať, že pre usporiadanie bodov platí . Bod leží medzi bodmi .
Ukážeme, že body
sú kolineárne a zároveň platí .
- Prvú časť tvrdenia dokážeme sporom. Nech body nie sú kolineárne, potom vytvárajú trojuholník a
na základe trojuholníkovej nerovnosti dostaneme spor.
- Teda body ležia na jednej priamke. Pre ich usporiadanie môžu nastať dva prípady, z ktorých iba prípad, keď bod
") leží medzi bodmi
leží medzi bodmi ,f(C)") vyhovuje podmienkam:
vyhovuje podmienkam:
f(C) \right| ,\left| BC \right| =\left| f(B)f(C) \right| ,\left| AB \right| =\left| f(A)f(B) \right|") .
.
. Načrtnite si obrázok.
Osová súmernosť je oproti ostatným zhodným zobrazeniam niečím výnimočná. Má jednu veľmi zaujímavú vlastnosť, skladaním osových súmerností sa dajú získať
všetky zhodné zobrazenia v rovine. Z toho dôvodu začneme analytickým vyjadrením osovej súmernosti.
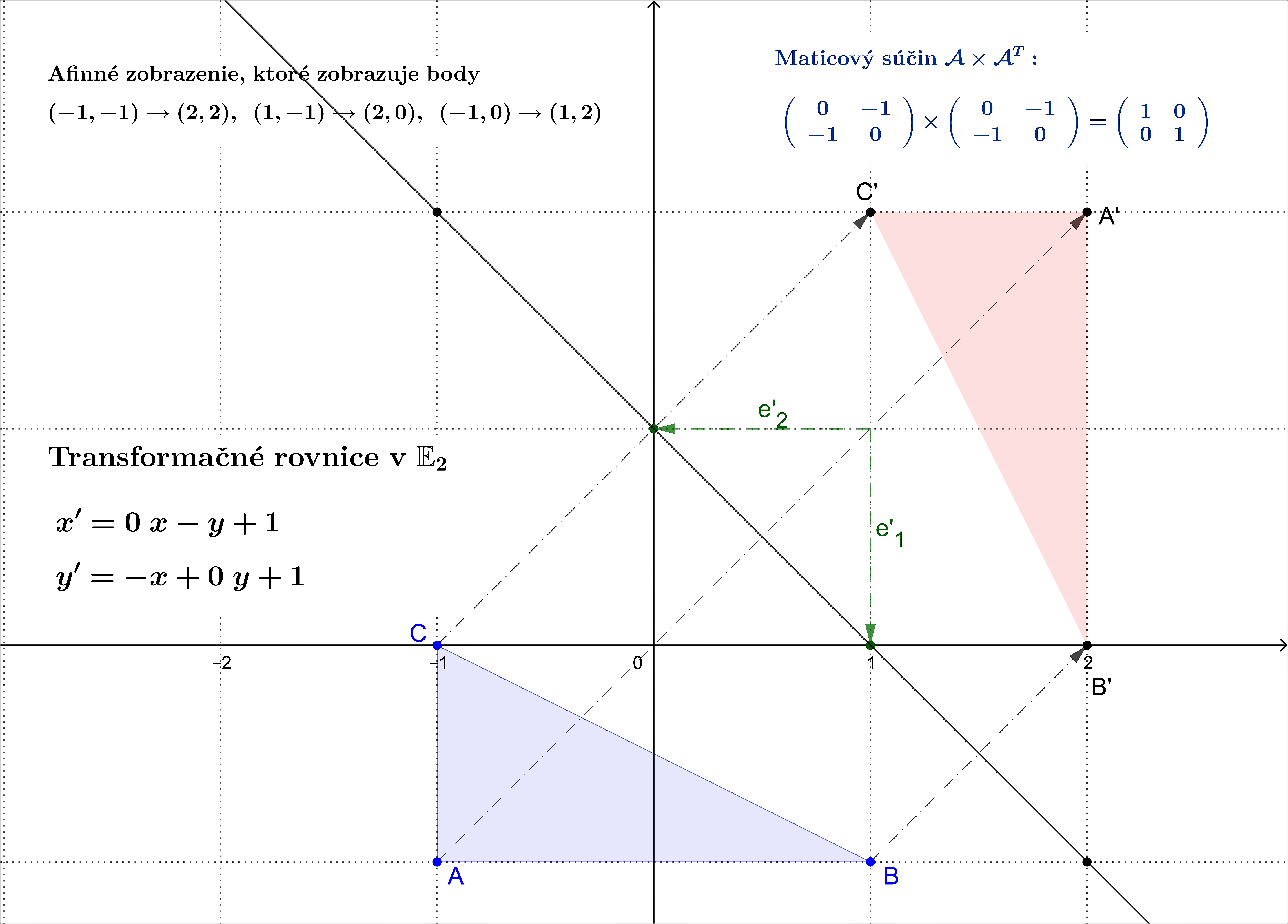
Geometrická interpretácia osovej súmernosti ako afinnej transformácie: Odvodenie rovníc Tu, Verzia "Repér" Tu
Geometrická interpretácia osovej súmernosti ako afinnej transformácie: Odvodenie rovníc Tu, Verzia "Repér" Tu
Nech  je euklidovská rovina so súradnicovou sústavou
je euklidovská rovina so súradnicovou sústavou
 . Zhodnostné zobrazenie
. Zhodnostné zobrazenie
 má analytické vyjadrenie
má analytické vyjadrenie
=\left( \begin{array}{} x & y \end{array} \right) ·\left( \begin{array}{} a_{11} & a_{21} \\ a_{12} & a_{22} \\ \end{array} \right)+\left( \begin{array}{} b_1 & b_2\end{array} \right)")
kde,(a_{i1},a_{i2})") sú obrazy počiatku súradnej sústavy a obrazy jednotkových vektorov repéra.
sú obrazy počiatku súradnej sústavy a obrazy jednotkových vektorov repéra.
je euklidovská rovina so súradnicovou sústavou
. Zhodnostné zobrazenie
má analytické vyjadrenie
kde
sú obrazy počiatku súradnej sústavy a obrazy jednotkových vektorov repéra.
Podmienka pre maticu
")

kde je transponovaná matica k matici
je transponovaná matica k matici  a matica
a matica  je jednotková.
je jednotková.
kde
je transponovaná matica k matici a matica je jednotková.
 \)
\)