Geometrické zobrazenia
| Portál: | Virtuálna Univerzita Mateja Bela |
| Kurz: | Planimetria a stereometria |
| Kniha: | Geometrické zobrazenia |
| Vytlačil(a): | Visiteur anonyme |
| Dátum: | streda, 3 júla 2024, 12:23 |
Zobrazenia
Definícia.
Pod geometrickým zobrazením v rovine rozumieme predpis
rozumieme predpis  , ktorý ľubovoľnému bodu
, ktorý ľubovoľnému bodu  priradí najviac jeden bod
priradí najviac jeden bod ") .
.
Pod geometrickým zobrazením v rovine
rozumieme predpis , ktorý ľubovoľnému bodu priradí najviac jeden bod .
V tejto kapitole sa budeme skúmať
- zhodné a podobné zobrazenia,
- osovú afinitu,
- stredovú kolineáciu,
- kruhovú inverziu.
Definícia.
Zobrazenie nazývame zhodné zobrazenie v (
nazývame zhodné zobrazenie v (  ), ak pre každé dva rôzne
body
), ak pre každé dva rôzne
body  platí
platí
 ,
,
kde, Y' = f(Y )") . Zhodné zobrazenia predstavujú geometrické zobrazenia euklidovskej roviny, ktoré zachovávajú incidenciu útvarov a vzdialenosť bodov (metriku).
. Zhodné zobrazenia predstavujú geometrické zobrazenia euklidovskej roviny, ktoré zachovávajú incidenciu útvarov a vzdialenosť bodov (metriku).
Zobrazenie
nazývame zhodné zobrazenie v ( ), ak pre každé dva rôzne
body platí
,
kde
. Zhodné zobrazenia predstavujú geometrické zobrazenia euklidovskej roviny, ktoré zachovávajú incidenciu útvarov a vzdialenosť bodov (metriku).
Rovinné geometrické útvary  sa nazývajú zhodné , ak existuje zhodné zobrazenie, ktoré jeden z nich zobrazí na druhý. Zhodnosť dvoch útvarov symbolicky označíme takto:
sa nazývajú zhodné , ak existuje zhodné zobrazenie, ktoré jeden z nich zobrazí na druhý. Zhodnosť dvoch útvarov symbolicky označíme takto:  alebo takto
alebo takto  .
.
sa nazývajú zhodné , ak existuje zhodné zobrazenie, ktoré jeden z nich zobrazí na druhý. Zhodnosť dvoch útvarov symbolicky označíme takto: alebo takto .
Definícia.
- Zhodné zobrazenie, ktoré nemení orientáciu trojice nelineárnych bodov nazývame priama zhodnosť . Zobrazenie, ktoré nie je priama zhodnosť sa nazýva nepriama zhodnosť.
- Útvar
 nazývame samodružným zobrazenie , ak sa v zobrazení zobrazí sám do seba, t.j.
nazývame samodružným zobrazenie , ak sa v zobrazení zobrazí sám do seba, t.j.
=U") .
.
V euklidovskej rovine poznáme šesť typov zhodných zobrazení a to
- identitu,
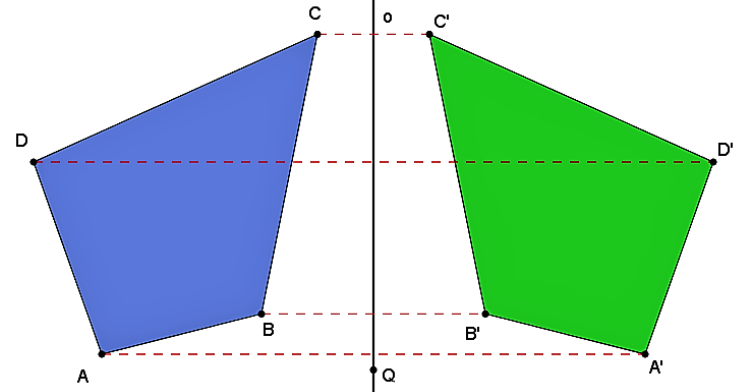
- osovú súmernosť,
- stredovú súmernosť,
- otočenie (rotáciu),
- posunutie (transláciu),
- posunutú súmernosť.
Tvrdenie.
Zložením dvoch zhodných zobrazení je zhodné zobrazenie.
Zložením dvoch zhodných zobrazení je zhodné zobrazenie.
Dôkaz tohto tvrdenia prenechávame na čitateľa.
Definícia.
Nech je daná priamka. Zobrazenie, pre ktoré platí:
je daná priamka. Zobrazenie, pre ktoré platí:
Nech
je daná priamka. Zobrazenie, pre ktoré platí:
- obrazom bodu
 ležiaceho na priamke
ležiaceho na priamke  je bod
je bod  , ktorý je totožný s bodom ,
, ktorý je totožný s bodom , - obrazom bodu neležiaceho na priamke je bod , pre ktorý platí, že priamka
 je kolmá na priamku
a stred úsečky leží na priamke ,
je kolmá na priamku
a stred úsečky leží na priamke ,
nazývame osová súmernosť, - Priamku nazývame os osovej súmernosti. Osovú súmernosť s osou budeme označovať symbolom
") .
.
Cvičenie.
Je daná priamka a body
a body  ležiace v tej istej polrovine s hraničnou priamkou . Určte bod
ležiace v tej istej polrovine s hraničnou priamkou . Určte bod  tak, aby súčet
tak, aby súčet
 bol čo najmenší.
bol čo najmenší.
Riešenie Tu.
Je daná priamka
a body ležiace v tej istej polrovine s hraničnou priamkou . Určte bod tak, aby súčet
bol čo najmenší.
Riešenie Tu.
 \)
\)
Stredová súmernosť a rotácia
Definícia.
Nech je daný bod. Zobrazenie, pre ktoré platí:
je daný bod. Zobrazenie, pre ktoré platí:
Nech
je daný bod. Zobrazenie, pre ktoré platí:
- obrazom bodu je bod
 ,
, - obrazom bodu
 je bod , pre ktorý platí, že bod
je bod , pre ktorý platí, že bod  je stredom úsečky nazývame stredová súmernosť ,
je stredom úsečky nazývame stredová súmernosť , - bod sa nazýva stred otáčania.
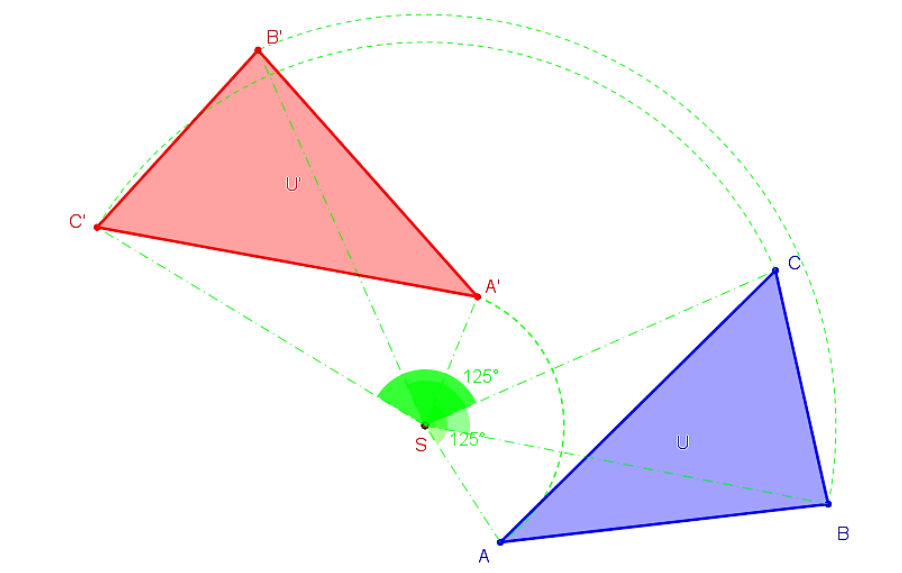
Definícia.
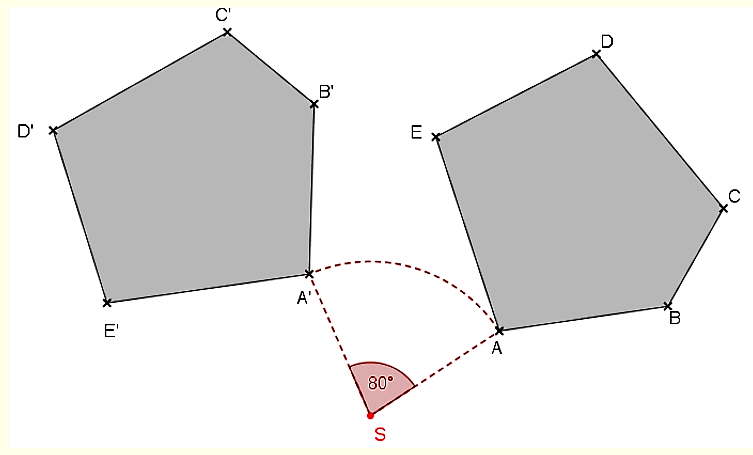
Nech je daný bod, uhol  (veľkosť uhla je nanajvýš 360°) a orientácia kladná (proti smeru hodinových ručičiek)
resp. záporná (v smeru hodinových ručičiek). Zobrazenie, pre ktoré platí:
(veľkosť uhla je nanajvýš 360°) a orientácia kladná (proti smeru hodinových ručičiek)
resp. záporná (v smeru hodinových ručičiek). Zobrazenie, pre ktoré platí:
Nech je daný bod
, uhol (veľkosť uhla je nanajvýš 360°) a orientácia kladná (proti smeru hodinových ručičiek)
resp. záporná (v smeru hodinových ručičiek). Zobrazenie, pre ktoré platí:
- obrazom bodu je bod ,
- obrazom bodu je bod
 , ktorý leží na kružnici
, ktorý leží na kružnici  a zároveň uhol
a zároveň uhol  je zhodný s uhlom
je zhodný s uhlom  , pričom orientácia je kladná, resp. záporná, sa nazýva otáčanie ,
, pričom orientácia je kladná, resp. záporná, sa nazýva otáčanie , - Bod sa nazýva stred otáčania. Otočenie so stredom a uhlom a kladnou resp. zápornou orientáciou
budeme označovať
 .
.
Tvrdenia (Rozklad zhodností na osové súmernosti).
- Identitu možno rozložiť na dve osové súmernosti, ktorých osi sú totožné. (Dôkaz prenechávame na čitateľa).
- Každú stredovú súmernosť možno rozložiť na dve osové súmernosti, ktorých osi sú na seba kolmé a prechádzajú stredom stredovej súmernosti.
- Každú rotáciu možno rozložiť na dve osové súmernosti, ktorých osi prechádzajú stredom rotácie, zvierajú uhol, ktorého veľkosť sa rovná jednej polovici veľkosti uhla rotácie, pričom orientácia uhla rotácie je súhlasná s orientáciou uhla od osi prvej osovej súmernosti ku osi druhej osovej súmernosti podľa poradia v zložení.
Cvičenie (Stredová súmernosť).
Sú dané dve sústredné kružnice; k_2(O,r_2); r_1> r_2") a bod vo vnútri
a bod vo vnútri  . Zostrojte obdĺžnik
. Zostrojte obdĺžnik
 tak, že
tak, že  a bod je jeho stredom.
Riešenie Tu.
a bod je jeho stredom.
Riešenie Tu.
Sú dané dve sústredné kružnice
a bod vo vnútri . Zostrojte obdĺžnik
tak, že a bod je jeho stredom.
Riešenie Tu.
\)
Posunutie
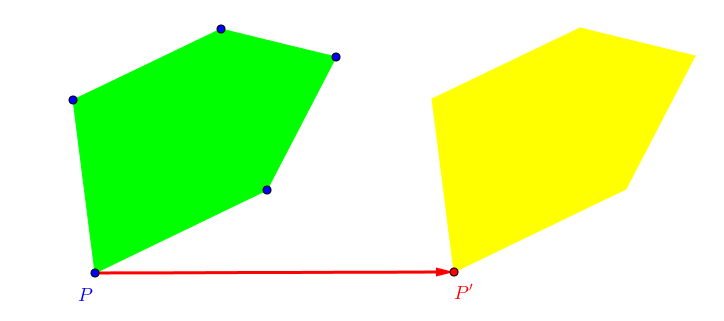
Definícia.
Daný je vektor . Zobrazenie, pre ktoré platí, že obrazom bodu je bod , pričom platí rovnosť vektorov
. Zobrazenie, pre ktoré platí, že obrazom bodu je bod , pričom platí rovnosť vektorov
 , sa nazýva posunutie alebo translácia.
, sa nazýva posunutie alebo translácia.
Vektor nazývame vektor posunutia. Posunutie o vektor budeme označovať
nazývame vektor posunutia. Posunutie o vektor budeme označovať  .
.
Daný je vektor
. Zobrazenie, pre ktoré platí, že obrazom bodu je bod , pričom platí rovnosť vektorov
, sa nazýva posunutie alebo translácia.
Vektor
nazývame vektor posunutia. Posunutie o vektor budeme označovať .
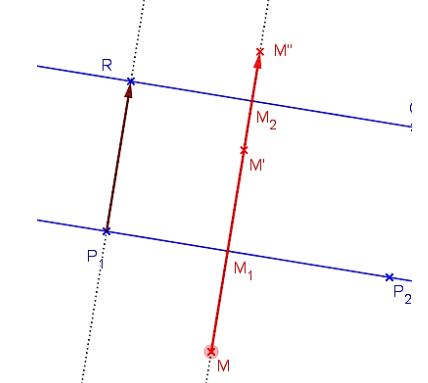
Tvrdenie.
Každé posunutie možno rozložiť na dve osové súmernosti, ktorých osi sú rovnobežné (rôzne), zároveň sú kolmé na vektor posunutia, ich vzdialenosť je rovná jednej polovici veľkosti vektora posunutia, pričom orientácia vektora posunutia je súhlasná s orientáciou od osi prvej osovej súmernosti ku osi druhej osovej súmernosti podľa poradia v zložení.
Každé posunutie možno rozložiť na dve osové súmernosti, ktorých osi sú rovnobežné (rôzne), zároveň sú kolmé na vektor posunutia, ich vzdialenosť je rovná jednej polovici veľkosti vektora posunutia, pričom orientácia vektora posunutia je súhlasná s orientáciou od osi prvej osovej súmernosti ku osi druhej osovej súmernosti podľa poradia v zložení.
Určenie vektora posunutia, ak posunutie je dané dvomi osovými súmernosťami je prezentované appletom "Posunutie".
Definícia.
Zostrojte rovnobežník ak sú dané veľkosti jeho strán a veľkosť
a veľkosť  uhla, ktorý zvierajú jeho uhlopriečky.
uhla, ktorý zvierajú jeho uhlopriečky.
Zostrojte rovnobežník ak sú dané veľkosti jeho strán
a veľkosť uhla, ktorý zvierajú jeho uhlopriečky.

Definícia.
Zobrazenie, ktoré je zložením osovej súmernosti a posunutia (v ľubovoľnom poradí), pričom os osovej súmernosti a vektor posunutia sú rovnobežné, nazývame posunutá súmernosť ; (posunutú súmernosť danú osou a vektorom budeme označovať  ).
).
Zobrazenie, ktoré je zložením osovej súmernosti a posunutia (v ľubovoľnom poradí), pričom os osovej súmernosti a vektor posunutia sú rovnobežné, nazývame posunutá súmernosť ; (posunutú súmernosť danú osou
a vektorom budeme označovať ).
Poznámka.
V niektorej literatúre sa pre posunutú súmernosť používa názov posunuté zrkadlenie.
V niektorej literatúre sa pre posunutú súmernosť používa názov posunuté zrkadlenie.
Tvrdenie
Zložením troch osových súmerností s navzájom rôznymi osami je buď osová súmernosť’ alebo posunutá súmernosť.
Zložením troch osových súmerností s navzájom rôznymi osami je buď osová súmernosť’ alebo posunutá súmernosť.
Dôkaz
Nech sú dané osové súmernosti, \sigma (o_2), \sigma (o_3)") a nech
a nech  sú navzájom rôzne priamky.
Pre vzájomnú polohu týchto troch priamok môžu nastať 3 prípady:
sú navzájom rôzne priamky.
Pre vzájomnú polohu týchto troch priamok môžu nastať 3 prípady:
Nech sú dané osové súmernosti
a nech sú navzájom rôzne priamky.
Pre vzájomnú polohu týchto troch priamok môžu nastať 3 prípady:
- Všetky priamky sú navzájom rovnobežné → výsledné zložené zobrazenie je osová súmernosť.
- Dve sú rovnobežné a tretia ich pretína → výsledné zložené zobrazenie je posunutá súmernosť.
- Priamky ležia na stranách trojuholníka (navzájom sú rôznobežné) → výsledné zložené zobrazenie je posunutá súmernosť. Otvorte si applet Tu.
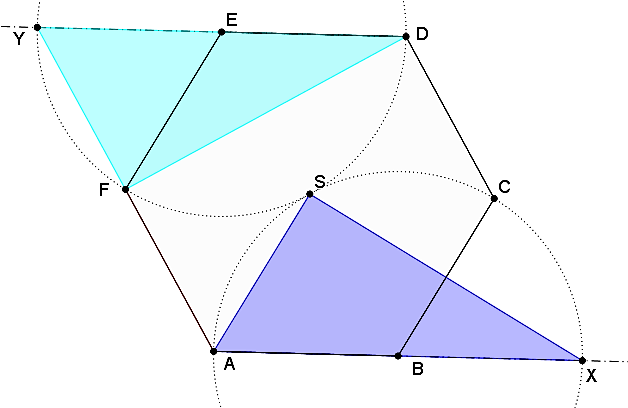
Cvičenie
Daný je pravidelný 6-uholník a body
a body  , pričom
, pričom  = (DEY ) = 2") . Nájdite zhodné zobrazenie,
ktoré zobrazí trojuholník
. Nájdite zhodné zobrazenie,
ktoré zobrazí trojuholník  do trojuholníka
do trojuholníka  . Bude to priama alebo nepriama zhodnosť?
. Bude to priama alebo nepriama zhodnosť?
Daný je pravidelný 6-uholník
a body , pričom . Nájdite zhodné zobrazenie,
ktoré zobrazí trojuholník do trojuholníka . Bude to priama alebo nepriama zhodnosť?
Grupa zhodných zobrazenií
Tvrdenie.
- Zloženie ľubovoľného konečného počtu osových súmerností možno vždy redukovať na zloženie maximálne troch osových súmerností.
Pozrite si konštrukčný dôkazu Tu.
- Zložením ľubovoľného konečného počtu zhodných zobrazení je identita, alebo osová súmernosť, alebo stredová súmernosť, alebo rotácia, alebo translácia, alebo posunutá súmernosť.
- Všetky zhodnosti v rovine tvoria vzhľadom na skladanie zobrazení grupu (tzv. grupu zhodností). Generátorom grupy zhodností je osová súmernosť.
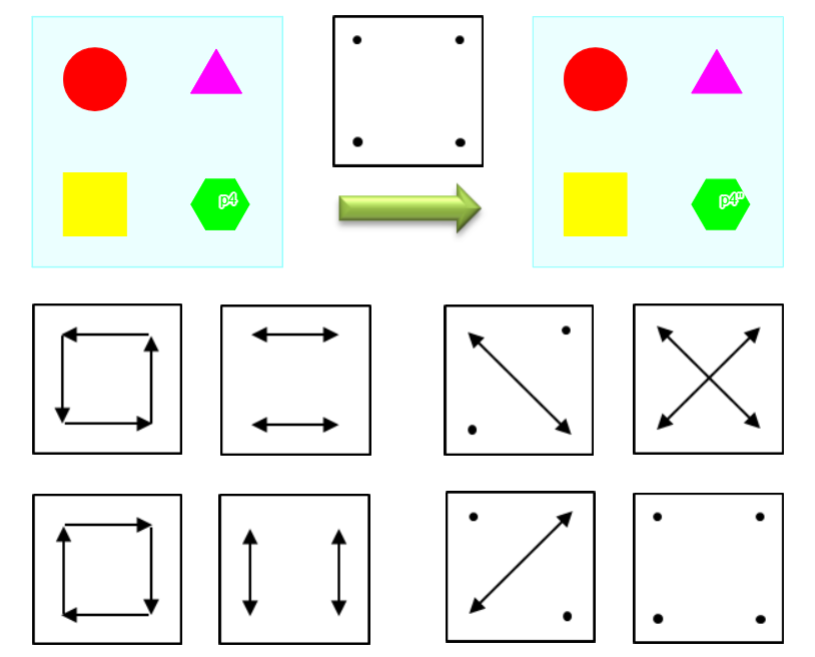
Zhodnosti reprodukujúce štvorec tvoria podgrupu. Pozrite si dynamický model.
 \)
\)
Rovnoľahlosť
Definícia.
Podobné zobrazenie (podobnosť) je zobrazenie, v ktorom obrazom každej úsečky je úsečka
je úsečka  , ktorej veľkosť je
, ktorej veľkosť je  -násobkom veľkosti úsečky
-násobkom veľkosti úsečky  (
(  ).
).
Podobné zobrazenie (podobnosť) je zobrazenie, v ktorom obrazom každej úsečky
je úsečka , ktorej veľkosť je -násobkom veľkosti úsečky ( ).
V každom podobnom zobrazení platí:
- obrazom priamky je priamka
 , obrazom rovnobežných priamok sú rovnobežné priamky,
, obrazom rovnobežných priamok sú rovnobežné priamky, - obrazom polpriamky
 je polpriamka
je polpriamka  ,
, - obrazom opačných polpriamok sú opačné polpriamky,
- obrazom uhla
 je uhol \\small \angle A'VB' \) zhodný s uhlom .
je uhol \\small \angle A'VB' \) zhodný s uhlom .
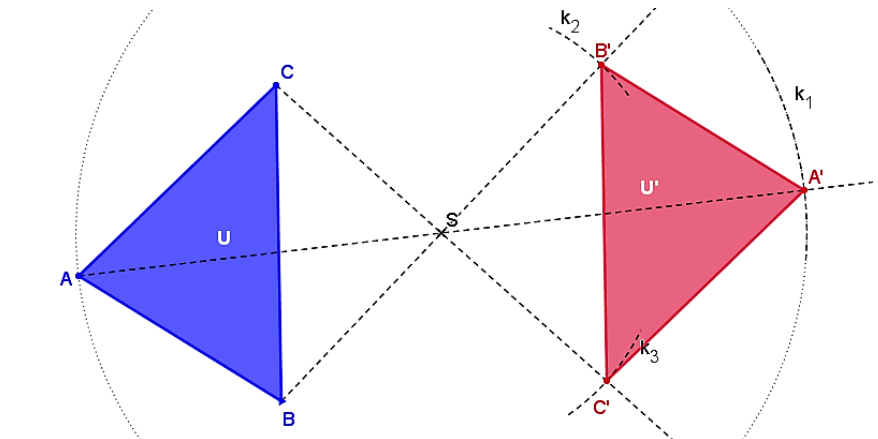
Definícia (Rovnoľahlosť).
Je daný bod a reálne číslo
a reálne číslo  . Rovnoľahlosť (homotétia) je zobrazenie
. Rovnoľahlosť (homotétia) je zobrazenie ") , ktoré priraďuje:
, ktoré priraďuje:
Je daný bod
a reálne číslo . Rovnoľahlosť (homotétia) je zobrazenie , ktoré priraďuje:
- každému bodu
 bod
bod  tak, že
tak, že  , pre
, pre  leží
na polpriamke
leží
na polpriamke  , pre
, pre  na polpriamke k nej opačnej,
na polpriamke k nej opačnej, - bodu bod
 .
.
Poznámka.
Rovnoľahlosť") je podobnosť s koeficientom
je podobnosť s koeficientom  . Pre
. Pre  je identitou, pre
je identitou, pre  rotáciou okolo
o 180° (aj stredovou súmernosťou so stredom v bode ).
rotáciou okolo
o 180° (aj stredovou súmernosťou so stredom v bode ).
Pre je jediným samodružným bodom stred . Samodružnou priamkou je každá priamka, ktorá prechádza stredom rovnoľahlosti. Pozrite si súbor appletov od
Martina Vinklera Tu.
je jediným samodružným bodom stred . Samodružnou priamkou je každá priamka, ktorá prechádza stredom rovnoľahlosti. Pozrite si súbor appletov od
Martina Vinklera Tu.
Rovnoľahlosť
je podobnosť s koeficientom . Pre je identitou, pre rotáciou okolo
o 180° (aj stredovou súmernosťou so stredom v bode ).
Pre
je jediným samodružným bodom stred . Samodružnou priamkou je každá priamka, ktorá prechádza stredom rovnoľahlosti. Pozrite si súbor appletov od
Martina Vinklera Tu.
Rovnoľahlosť je špeciálne podobné zobrazenie. To znamená, že má všetky vlastnosti podobného zobrazenia.
Naviac má vlastnosť, že v rovnoľahlosti odpovedajúce priamky (vzor a obraz) sú rovnobežné.
Naviac má vlastnosť, že v rovnoľahlosti odpovedajúce priamky (vzor a obraz) sú rovnobežné.
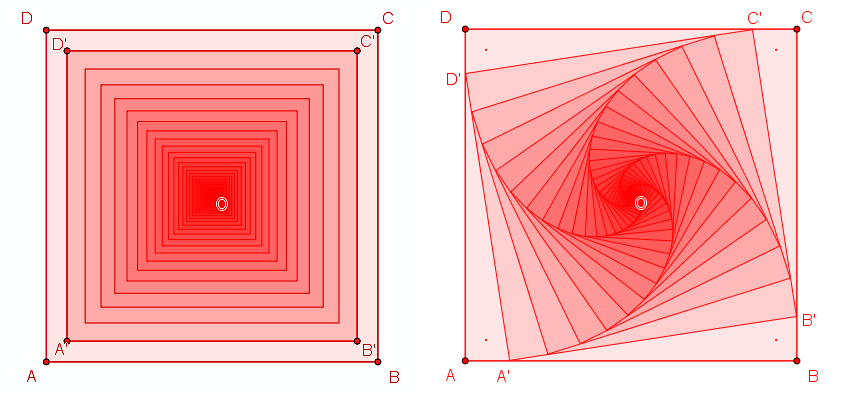
Vľavo. V rovnoľahlosti platí:
 . Vpravo. Podobné zobrazenie zložené z rovnoľahlosti a otáčania.
. Vpravo. Podobné zobrazenie zložené z rovnoľahlosti a otáčania.
Otvorte si applet Tu.
Veta 1.
V rovnoľahlosti") :
: 
V rovnoľahlosti
:
- každé dve rovnoľahlé priamky sú rovnobežné,
- každé dve rovnobežné a nezhodné úsečky sú rovnoľahlé dvomi spôsobmi,
- každé dve nezhodné kružnice
,(O_2,r_2)") sú rovnoľahlé, pričom stredy rovnoľahlosti ležia na strednej kružníc,
sú rovnoľahlé, pričom stredy rovnoľahlosti ležia na strednej kružníc, - spoločné dotyčnice dvoch kružníc prechádzajú odpovedajúcimi stredmi rovnoľahlostí (vnútorným
 a vonkajším
a vonkajším  stredom rovnoľahlosti).
stredom rovnoľahlosti).
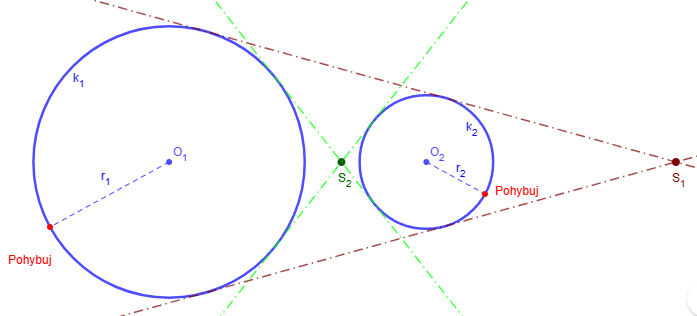
Veta 2.
Nech sú dve kružnice,k_2=(O_2,r_2)") rovnoľahlé, ich vonkajší stred rovnoľahlosti je bod
rovnoľahlé, ich vonkajší stred rovnoľahlosti je bod  , vnútorný stred rovnoľahlosti
, vnútorný stred rovnoľahlosti  . Potom platí
. Potom platí
:k_2 \rightarrow k_1") ,
,:k_1 \rightarrow k_2") .
.
Nech sú dve kružnice
rovnoľahlé, ich vonkajší stred rovnoľahlosti je bod , vnútorný stred rovnoľahlosti . Potom platí
, .
Veta 3.
Zložením rovnoľahlosti a zhodného zobrazenia dostaneme podobné zobrazenie.
Každé podobné zobrazenie možno získať zložením vhodného zhodného zobrazenia a rovnoľahlosti >.
Zložením rovnoľahlosti a zhodného zobrazenia dostaneme podobné zobrazenie.
Každé podobné zobrazenie možno získať zložením vhodného zhodného zobrazenia a rovnoľahlosti >.
Cvičenie 1.
Do daného trojuholníka vpíšte štvorec
vpíšte štvorec  tak , aby strana
tak , aby strana  ležala na strane ,
bod
ležala na strane ,
bod  ležal na strane
ležal na strane  a bod
a bod  na strane
na strane  .
.
Riešenie v práci [RUM], str. 98.
Do daného trojuholníka
vpíšte štvorec tak , aby strana ležala na strane ,
bod ležal na strane a bod na strane .
Riešenie v práci [RUM], str. 98.
Cvičenie 2.
Sú dané dva rôzne body , ktorých vzdialenosť je
, ktorých vzdialenosť je  . Ďalej je dané kladné číslo
. Ďalej je dané kladné číslo  . Zostrojte
kosoštvorec
. Zostrojte
kosoštvorec  s výškou tak ,aby bod bol stredom jeho strany .
s výškou tak ,aby bod bol stredom jeho strany .
Sú dané dva rôzne body
, ktorých vzdialenosť je . Ďalej je dané kladné číslo . Zostrojte
kosoštvorec s výškou tak ,aby bod bol stredom jeho strany .
 \)
\)
Afinita
Geometrické zobrazenia  v euklidovskej rovine môžeme skúmať aj podľa počtu a druhu samodružných prvkov.
v euklidovskej rovine môžeme skúmať aj podľa počtu a druhu samodružných prvkov.
v euklidovskej rovine môžeme skúmať aj podľa počtu a druhu samodružných prvkov.
Definícia (Samodružné prvky).
- Samodružný bod
 je bod, ktorý sa pri zobrazení
je bod, ktorý sa pri zobrazení  zobrazí sám na seba. Platí: .
zobrazí sám na seba. Platí: . - Samodružná priamka
 je priamka, ktorá sa pri zobrazení zobrazí sama na seba
je priamka, ktorá sa pri zobrazení zobrazí sama na seba ") . Zároveň existuje bod
. Zároveň existuje bod  , ktorý sa zobrazí do bodu
, ktorý sa zobrazí do bodu  .
. - Priamka samodružných bodov je priamka, kde každý jej bod je samodružný. Pre každý bod na priamke platí X = X'. Hovoríme o bodovo samodružnej priamke.
Zvoľme si v euklidovskej rovine dve rôznobežné priamky  . Pozrite si obrázok Afinita. Budeme skúmať geometrické zobrazenie
. Pozrite si obrázok Afinita. Budeme skúmať geometrické zobrazenie  s vlastnosťami
s vlastnosťami
Obr. Afinita
dve rôznobežné priamky . Pozrite si obrázok Afinita. Budeme skúmať geometrické zobrazenie s vlastnosťami
- Obrazom ľubovoľného bodu
 je ten istý bod , priamka
je ten istý bod , priamka  je bodovo samodružná..
je bodovo samodružná.. - Obrazom ľubovoľného bodu
 je bod
je bod  , ktorý leží na priamke
, ktorý leží na priamke  .
. - Obrazom priamky
 je priamka
je priamka  , pričom bod
, pričom bod  je samodružný. V prípade
rovnobežnosti
je samodružný. V prípade
rovnobežnosti  je tiež
je tiež  (bod 1 je nevlastný).
(bod 1 je nevlastný). - Obrazom priamky rovnobežnej s priamkou
 je tá istá priamka, priamka je samodružná.
je tá istá priamka, priamka je samodružná. - Takéto zobrazenie je zrejme bijektívne zobrazenie euklidovskej roviny. Budeme ho nazývať osová afinita v rovine.
Obr. Afinita
Vlastnosti.
- osová afinita je jednoznačne určená priakou
 a dvojicou odpovedajúcich si bodov
a dvojicou odpovedajúcich si bodov  ,
, - priamku nazývame os afinity a priamku
 nazývame smer afinity,
nazývame smer afinity, - osová afinita zachováva incidenciu, rovnobežnosť a deliaci pomer troch kolineárnych bodov. Dôkaz je založený na vlastnosti podobných trojuholníkov. Pozrite si prácu [PLICH].
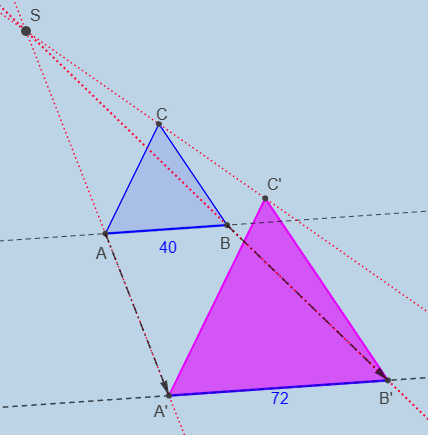
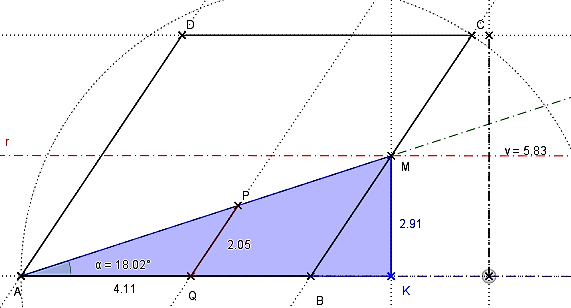
Osovú afinitu môžeme využiť aj pri dôkazoch niektorých vlastností všeobecných trojuholníkov. Stačí ak dokážeme určiť osovú afinitu, v ktorej sa daný všeobecný trojuholník zobrazí na rovnostraný trojuholník. Keďže osová afinita zachováva incidenciu a deliaci pomer (špeciálne stred úsečky sa zobrazí do stredu úsečky), tak napríklad vlastnosť ťažníc stačí dokázať len pre rovnostranný trojuholník.
Uvedieme konštrukciu ako takúto osová afinitu určuíť.
Uvedieme konštrukciu ako takúto osová afinitu určuíť.
Cvičenie.
Určte OA tak, aby sa všeobecný trojuholník zobrazil do rovnostranného trojuholníka
zobrazil do rovnostranného trojuholníka  . Riešenie nájdete Tu.
. Riešenie nájdete Tu.
Určte OA tak, aby sa všeobecný trojuholník
zobrazil do rovnostranného trojuholníka . Riešenie nájdete Tu.
Riešené príklady.
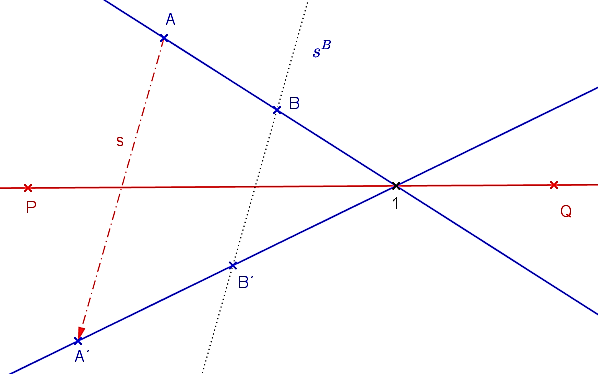
Osová afinita je daná osou a dvojicou odpovedajúcich bodov 
") .
Zostrojte bod
.
Zostrojte bod  , ktorý je obrazom daného bodu
, ktorý je obrazom daného bodu  . Nech
. Nech  je priamka určená bodmi . Uvažujme dva prípady:
je priamka určená bodmi . Uvažujme dva prípady:
Osová afinita je daná osou
a dvojicou odpovedajúcich bodov .
Zostrojte bod , ktorý je obrazom daného bodu . Nech je priamka určená bodmi . Uvažujme dva prípady:
- Priamka
 je rôznobežná s osou , riešenie Tu.
je rôznobežná s osou , riešenie Tu. - Ak priamka je rovnobežná s osou tak použijeme konštrukciu:
- zvoľme si vhodnú priamku
 prechádzajúcu bodom
prechádzajúcu bodom  , ktorá nie je rovnobežná s osou
, ktorá nie je rovnobežná s osou - na priamke
 si zvoľme bod
si zvoľme bod  tak, aby priamka
tak, aby priamka  nebola rovnobežná s osou
nebola rovnobežná s osou - obrazom priamky
 je priamka
je priamka  , obraz
, obraz  bodu musí ležať na priamke
bodu musí ležať na priamke 
- bodmi
 je určená priamka
je určená priamka  , obrazom priamky
, obrazom priamky  je priamka
je priamka 
- obraz
 bodu musí ležať na priamke
bodu musí ležať na priamke  , riešenie
Tu.
, riešenie
Tu.
- zvoľme si vhodnú priamku
Veta.
Obraz kružnice v osovej afinite je elipsa (dôkaz je jednoduchý ak využijeme metódy analytickej geometrie).
Obraz kružnice v osovej afinite je elipsa (dôkaz je jednoduchý ak využijeme metódy analytickej geometrie).
Na zostrojenie takejto elipsu môžeme využiť dva spôsoby.
- Priama konštrukcia hlavnej a vedľajšej poloosi.
Nájdením združených priemerov elipsy. Využijeme skutočnosť, že v kružnici združené priemery sú také priemery, ktoré sú vzájomne kolmé. (Priemery elipsy resp. kružnice sa nazývajú združené, ak sú dotyčnice v krajných bodoch jedného priemeru rovnobežné s druhým priemerom a naopak.) - Nepriamo pomocou Rytzovej konštrukcie.
V kružnici zvolíme dva ľubovoľné na seba kolmé priemery KL, MN a nájdeme ich obrazy K'L', M'N'. Osová afinita zachováva rovnobežnosť a deliaci pomer. Preto tvoria úsečky K'L', M'N' združené priemery elipsy. Ak poznáme dva združené priemery elipsy, využijeme na nájdenie hlavnej a vedľajšej osi Rytzovu konštrukciu. Stiahnite si Rytzovu konštrukciu Tu a pozrite si prácu [PLI].
Poznámka.
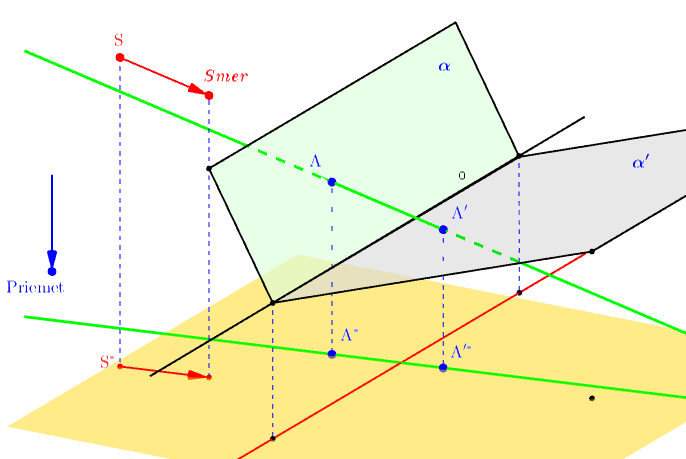
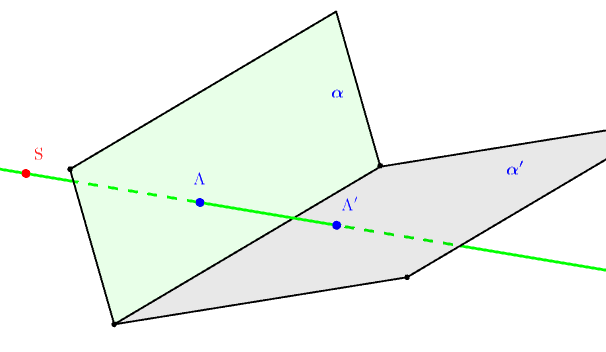
Vzťah osovej afinity v euklidovskej rovine si môžeme predstaviť aj ako kolmý priemet priestorovej afinity. Uvedieme definíciu osovej afinity medzi dvoma rôznobežnými rovinami v euklidovskom priestore z práce [DRA]. Pozrite si dynamický obrázok "Priestorová afinita".
Vzťah osovej afinity v euklidovskej rovine si môžeme predstaviť aj ako kolmý priemet priestorovej afinity. Uvedieme definíciu osovej afinity medzi dvoma rôznobežnými rovinami v euklidovskom priestore z práce [DRA]. Pozrite si dynamický obrázok "Priestorová afinita".
Definícia.
Uvažujme dve rôznobežné roviny a ich priesečnicu označme . Zvoľme ďalej smer
a ich priesečnicu označme . Zvoľme ďalej smer  , ktorý je rôznobežný s oboma rovinami
, ktorý je rôznobežný s oboma rovinami
 . Potom priradíme navzájom body a priamky roviny
. Potom priradíme navzájom body a priamky roviny  bodom a priamkam roviny
bodom a priamkam roviny  tak, že platí:
tak, že platí:
Uvažujme dve rôznobežné roviny
a ich priesečnicu označme . Zvoľme ďalej smer , ktorý je rôznobežný s oboma rovinami
. Potom priradíme navzájom body a priamky roviny bodom a priamkam roviny tak, že platí:
- spojnice zodpovedajúcich si bodov sú rovnobežné s priamkou ,
- priesečníky zodpovedajúcich si priamok ležia na priamke .
- Osovú afinitu medzi dvoma rôznobežnými rovinami s výhodou využívame pri rezoch rovnobežnostena.
- Porovnajme vlastnosti osovej afinity s rezom hranola, obrázok "Rez hranola (obrázok je prevzatý s práce [PLI]).
- Rovina
 zodpovedá rovine rezu, rovina
zodpovedá rovine rezu, rovina  zodpovedá rovine dolnej podstavy. Smer afinity s zodpovedá smeru hrán, napríklad
zodpovedá rovine dolnej podstavy. Smer afinity s zodpovedá smeru hrán, napríklad  . Zodpovedajúce si body sú napríklad body . Os je priesečnica rovín
. Zodpovedajúce si body sú napríklad body . Os je priesečnica rovín  a zodpovedá priesečnici roviny podstavy a roviny rezu.
a zodpovedá priesečnici roviny podstavy a roviny rezu.
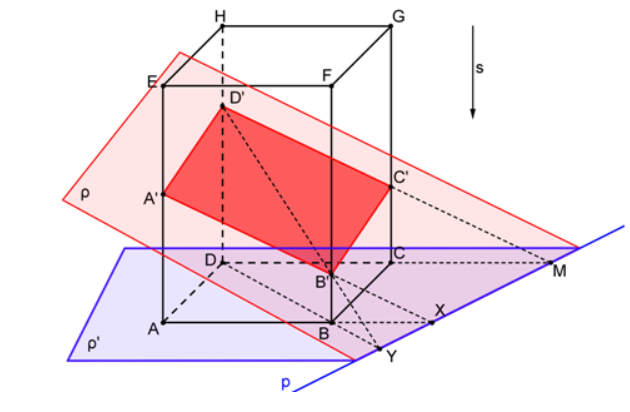
Obr. Rez hranola
\)
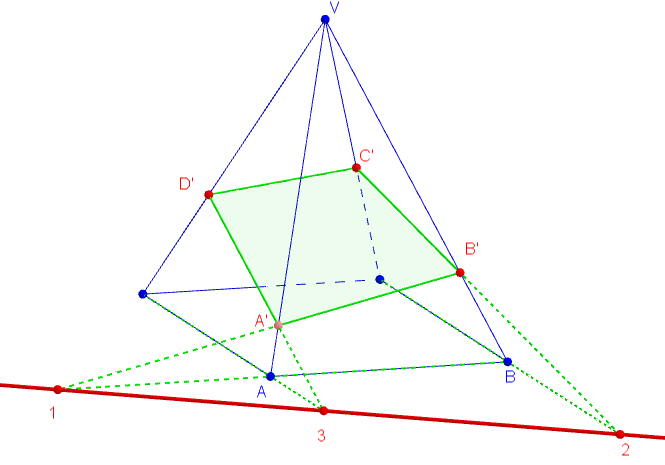
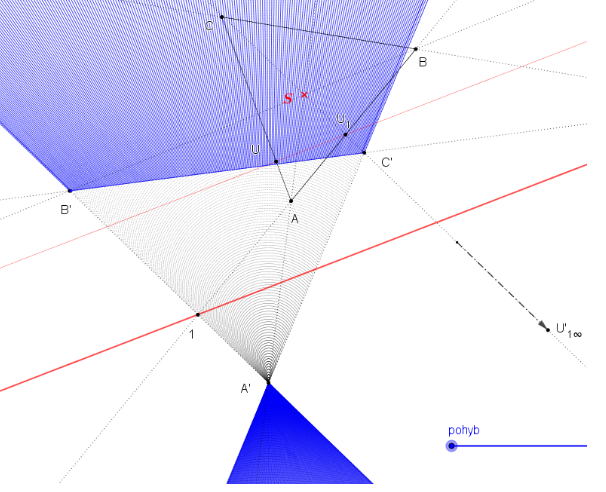
Stredová kolineácia
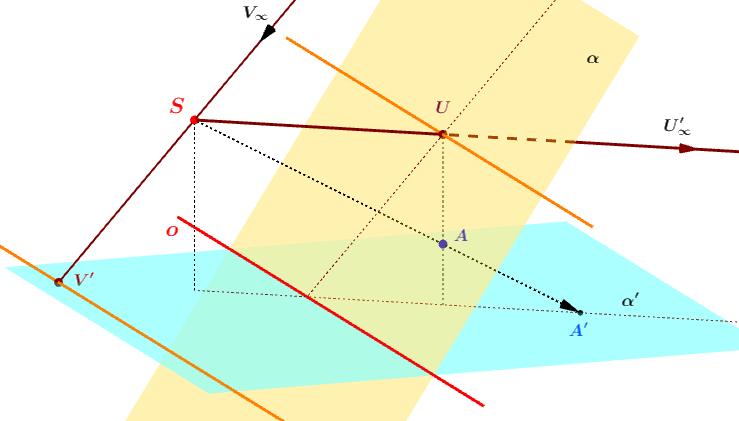
Definícia (Stredová kolineácia medzi dvoma rovinami).
Nech sú dané dve rôzne roviny a bod , ktorý neleží ani v jednej z nich.
Nech sú dané dve rôzne roviny
a bod , ktorý neleží ani v jednej z nich.
- Stredová kolineácia je bijektívne zobrazenie dvoch rovín, pri ktorom každému bodu prvej roviny odpovedá jeho priemet zo stredu do roviny druhej. Používa sa aj termín perspektívna kolineácia.
- Stred premietania sa nazýva stred kolineácie. Priamku , priesečnicu rovín , nazývame osou stredovej kolineácie.
Obr. Stredová kolineácia medzi dvoma rovinami
Vlastnosti.
- Vlastnému bodu môže odpovedať nevlastný bod a naopak. Ak bod
 leží v rovine rovnobežnej s rovinou , tak
priamka
leží v rovine rovnobežnej s rovinou , tak
priamka  sa s rovinou pretína v nevlastnom bode. Analogicky pre bod
sa s rovinou pretína v nevlastnom bode. Analogicky pre bod  .
. - Priamky, ktoré si odpovedajú v perspektívnej kolineácii, sa pretínajú na osi kolineácie alebo sú s ňou rovnobežné (majú spoločný nevlastný bod).
- Body osi kolineácie sú samodružné body. Perspektívna kolineácia zachováva incidenciu.
- Perspektívna kolineácia nezachováva deliaci pomer ale zachováva dvojpomer. Stred úsečky sa vo všeobecnosti nezobrazuje do stredu úsečky.
Pre situáciu, keď obrazom vlastného bodu ja nevlastný bod a naopak, používame terminológiu:
- Vlastný bod
 , ktorý sa v kolineácii zobrazí do nevlastného
, ktorý sa v kolineácii zobrazí do nevlastného  nazývame úbežník
(niekedy úbežník 1. druhu).
nazývame úbežník
(niekedy úbežník 1. druhu). - Vlastný bod
 , ktorý je v kolineácii obrazom nevlastného bodu
, ktorý je v kolineácii obrazom nevlastného bodu  nazývame úbežník
(niekedy úbežník 2. druhu).
nazývame úbežník
(niekedy úbežník 2. druhu). - Priamky, ktoré sú obrazom alebo vzorom nevlastnej priamky sa nazývajú úbežnice . Úbežnice(priamky) obsahujú všetky úbežníky daného druhu a sú rovnobežné s osou afinity.
Špeciálny typ perspektívnej kolineácie ak stred
je nevlastný bod,
tak perspektívna kolineácia je osová afinita.
Perspektívnu kolineáciu si môžeme zjednodušene predstaviť ako vzťah medzi rezom ihlana (resp. kužeľa) rovinou a podstavou.
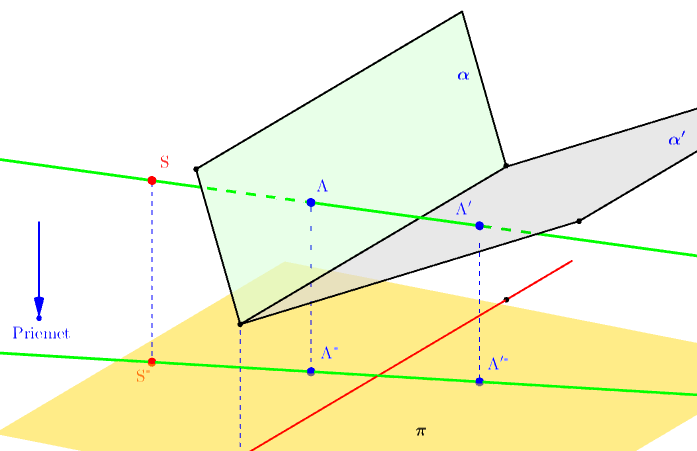
Poznámka.
Stredovú kolineáciu medzi dvoma rovinami v euklidovskom priestore môžeme previesť na stredovú kolineáciu v rovine.
Stredovú kolineáciu medzi dvoma rovinami
v euklidovskom priestore môžeme previesť na stredovú kolineáciu v rovine.
- Zvolíme si rovinu
 , do ktorej budeme premietať a smer premietania určený vektorom "Priemet", pričom smer premietania volíme tak, aby nebol rovnobežný so
žiadnou z rovín .
, do ktorej budeme premietať a smer premietania určený vektorom "Priemet", pričom smer premietania volíme tak, aby nebol rovnobežný so
žiadnou z rovín . - Os kolineácie , stred kolineácie a zodpovedajúce si body premietneme pomocou smeru "Priemet" do roviny
 .
. - Keďže rovnobežné premietanie (smer "Priemet") zachováva rovnobežnosť, tak pre body
 platí opäť vzťah stredovej kolineácie.
platí opäť vzťah stredovej kolineácie. - Stred kolineácie
 je rovnobežným priemetom stredu , podobne body sú priemety bodov .
je rovnobežným priemetom stredu , podobne body sú priemety bodov . - Dvojicu odpovedajúcich si bodov nazývame kolineárne združené body.
- Vo všeobecnosti kolineácia je jednoznačne určená stredom
 , osou a dvojicou odpovedajúcich si bodov
, osou a dvojicou odpovedajúcich si bodov  .
V takom prípade budeme pre kolineáciu používať označenie
.
V takom prípade budeme pre kolineáciu používať označenie ") .
.
Cvičenie.
")
")



Veta.
Obrazom kružnice v stredovej kolineácii je regulárna kužeľosečka (elipsa, parabola alebo hyperbola).
Obrazom kružnice v stredovej kolineácii je regulárna kužeľosečka (elipsa, parabola alebo hyperbola).
Regulárne kužeľosečky môžeme klasifikovať podľa počtu nevlastných bodov. Elipsa má všetky body vlastné. Parabola má jeden nevlastný bod a hyperbola má dva nevlastné body.
Z predchádzajúceho textu vieme, že obrazom úbežníku I. druhu je nevlastný bod. Z toho vyplýva, že ak kružnica s úbežnicou
Z predchádzajúceho textu vieme, že obrazom úbežníku I. druhu je nevlastný bod. Z toho vyplýva, že ak kružnica s úbežnicou
- nemá žiadny spoločný bod, potom je obrazom kružnice elipsa,
- má práve jeden spoločný bod, potom je obrazom kružnice parabola,
- má dva rôzne priesečníky, potom je obrazom kružnice hyperbola.
\)
Kruhová inverzia
Möbiova rovina je euklidovská rovina doplnená o jeden nevlastný bod  , ktorý budeme nazývať Möbiov bod.
, ktorý budeme nazývať Möbiov bod.
V takto doplnenej rovine môžeme definovať zobrazenie, ktoré sa nazýva kruhová inverzia.
, ktorý budeme nazývať Möbiov bod.
V takto doplnenej rovine môžeme definovať zobrazenie, ktoré sa nazýva kruhová inverzia.
Definícia 20
V Möbiovej rovine je daná kružnica") . Kruhová inverzia vzhľadom ku kružnici
. Kruhová inverzia vzhľadom ku kružnici  je zobrazenie, ktorého obrazom
je zobrazenie, ktorého obrazom
V Möbiovej rovine je daná kružnica
. Kruhová inverzia vzhľadom ku kružnici je zobrazenie, ktorého obrazom
- stredu kružnice je bod
- bodu je stred kružnice
- ľubovoľného bodu
 a
a  je bod ležiaci na
polpriamke
je bod ležiaci na
polpriamke  tak, že platí
tak, že platí
 .
.
Poznamenajme, že
 , ležiaci mimo kružnice :
, ležiaci mimo kružnice :
Z bodu zostrojíme dotyčnicu kružnice  , bod dotyku označme
, bod dotyku označme  . Z bodu
. Z bodu  zostrojíme kolmicu na priamku
zostrojíme kolmicu na priamku  , päta tejto kolmice je hľadaný obraz . Konštrukciu je možné použiť aj pre bod ležiaceho vo vnútri kružnice .
, päta tejto kolmice je hľadaný obraz . Konštrukciu je možné použiť aj pre bod ležiaceho vo vnútri kružnice .
Kruhová inverzia je nelineárne zobrazenie, priamka až na špeciálne prípady sa nezobrazuje na priamku (priamky, ktoré neprechádzajú stredom inverzie, sa zobrazujú na kružnice).
- ak bod je obrazom bodu , potom je aj bod obrazom bodu ,
dvojicu odpovedajúcich bodov nazývame aj navzájom inverzné body - kruhová inverzia je involútorné zobrazenie;
- body na kružnici sú samodružné;
- bod ležiaci vo vnútri kružnice sa zobrazí na vonkajší bod a naopak.
Konštrukcia obrazu
ľubovoľného bodu a
a  je založená na Euklidovej vete o odvesne.
je založená na Euklidovej vete o odvesne.
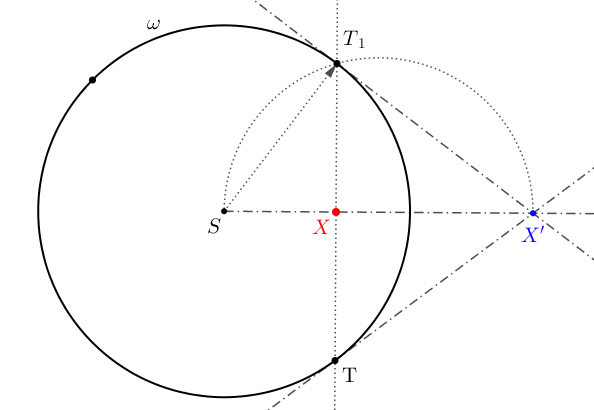 , ležiaci mimo kružnice :
, ležiaci mimo kružnice :
Z bodu
zostrojíme dotyčnicu kružnice , bod dotyku označme . Z bodu
zostrojíme kolmicu na priamku , päta tejto kolmice je hľadaný obraz . Konštrukciu je možné použiť aj pre bod ležiaceho vo vnútri kružnice .
Kruhová inverzia je nelineárne zobrazenie, priamka až na špeciálne prípady sa nezobrazuje na priamku (priamky, ktoré neprechádzajú stredom inverzie, sa zobrazujú na kružnice).
Veta (Konformné zobrazenie).
Kruhová inverzia je konformné zobrazenie, t.j zachováva veľkosť uhla . Pozrite si obrázok "Konformné zobrazenie".
. Pozrite si obrázok "Konformné zobrazenie".
Kruhová inverzia je konformné zobrazenie, t.j zachováva veľkosť uhla
. Pozrite si obrázok "Konformné zobrazenie".
Dôkaz
Z definície kruhovej inverzie vyplýva
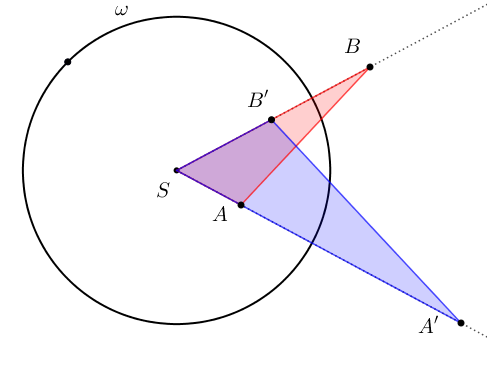
Obr. Konformné zobrazenie

Teda trojuholníky
 majú spoločný uhol pri vrchole, sú podľa vety
majú spoločný uhol pri vrchole, sú podľa vety  podobné.
podobné.
Tvrdenie (Obraz priamky a kružnice).
Body priamky prechádzajúcej stredom inverzie sa zobrazujú opäť na túto priamku.
Body priamky prechádzajúcej stredom inverzie
sa zobrazujú opäť na túto priamku.
Dôkaz.
Ide vlastne o špeciálny prípad vety o konformnom zobrazení, keď bod
 leží na kolmici k polpriamke
leží na kolmici k polpriamke  .
Zrejme platí
.
Zrejme platí
margin-left: 80px;">
 ,
,
lebo trojuholníky
 sú podobné. Uhol pri vrchole
sú podobné. Uhol pri vrchole  je pravý,
preto bod
je pravý,
preto bod  je zrejme bodom Thálesovej kružnice.
je zrejme bodom Thálesovej kružnice.
Dôsledky .
- Obrazom priamky , ktorá neprechádza stredom inverzie je kružnica prechádzajúca stredom .
- Obrazom kružnice prechádzajúcej stredom inverzie je priamka, ktorá neprechádza stredom inverzie.
- Samodružnými bodmi sú body určujúcej kružnice .
- Samodružnými priamkami sú priamky prechádzajúce stredom inverzie.
- Samodružné kružnice sú tie, ktoré ortogonálne pretínajú určujúcu kružnicu. Dôkaz si môžete pozrieť v práci [JAN].
Dôkazy týchto dôsledkov sa opierajú o involútornosť kruhovej inverzie.
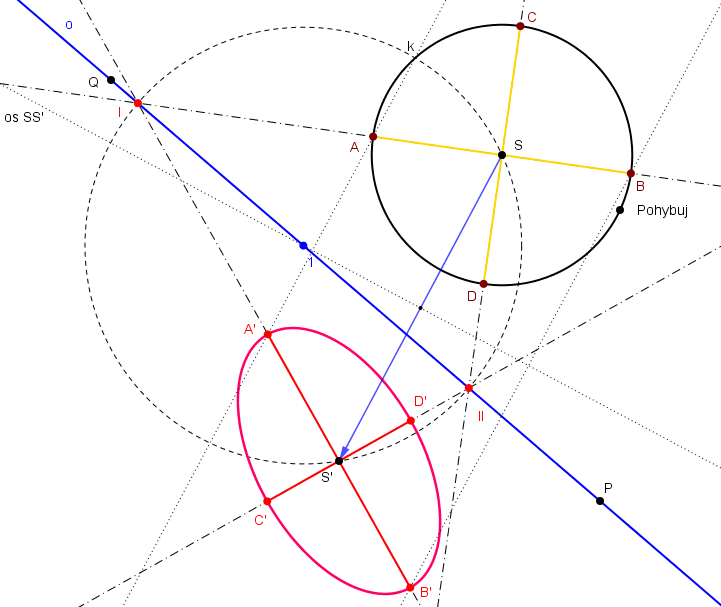
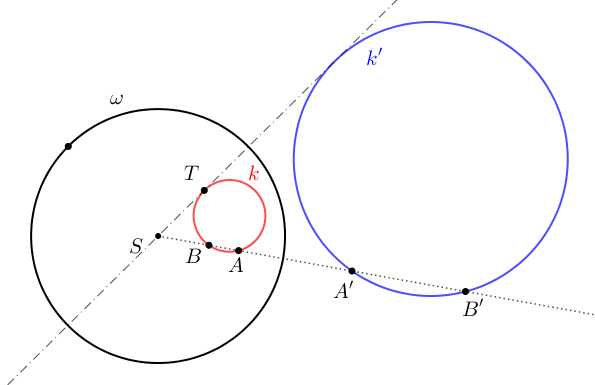
Tvrdenie (Obraz kružnice neprechádzajúcej stredom ).
Obrazom kružnice, ktorá neprechádza stredom inverzie je kružnica.
).
Obrazom kružnice, ktorá neprechádza stredom inverzie
je kružnica.
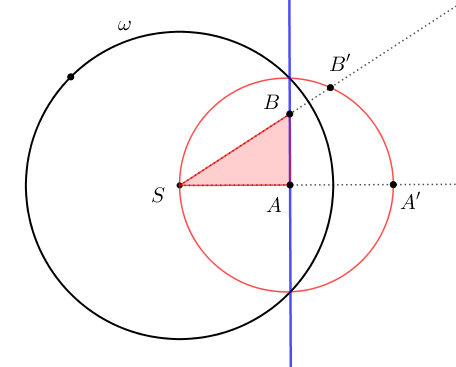
Poznámka.
Z obrázku "Obraz kružnice" je zrejmá jedna typická ale často opomínaná vlastnosť kruhovej inverzie:
Obrazom stredu kružnice nie je stred kružnice  .
.
Z obrázku "Obraz kružnice" je zrejmá jedna typická ale často opomínaná vlastnosť kruhovej inverzie:
Obrazom stredu kružnice
nie je stred kružnice .
Apolloniova úloha.
Zostrojte kružnicu dotýkajúcu sa troch geometrických útvarov: bodu - , priamky - , kružnice - .
, priamky - , kružnice - .
Zostrojte kružnicu dotýkajúcu sa troch geometrických útvarov: bodu -
, priamky - , kružnice - .
- Existuje celkove desať možných kombinácií. Napr.
 znamená zostrojiť kružnicu, ktorá prechádza bodom a dotýka sa dvoch priamok.
Dotyk s bodom znamená incidenciu s ním.
znamená zostrojiť kružnicu, ktorá prechádza bodom a dotýka sa dvoch priamok.
Dotyk s bodom znamená incidenciu s ním. - Najjednoduchšie prípady nastanú, keď sú dané tri body alebo tri priamky; tieto prípady vyriešil Euklides vo svojich Základoch. Apolloniove úlohy patria dodnes k najpríťažlivejším úlohám syntetickej geometrie.
Historické poznámky.
- O dotyku kružníc údajne písal už Archimedes. Jeho spis sa však nezachoval. Taktiež sa nezachoval dvojzväzkový pôvodný spis Apollonia z Pergy (262?-190? pred n. l.) „O dotykoch".
- Zmienil sa o ňom Pappos okolo roku 320, podľa ktorého Apollonios vyriešil všetky úlohy s výnimkou prípadu troch kružníc.
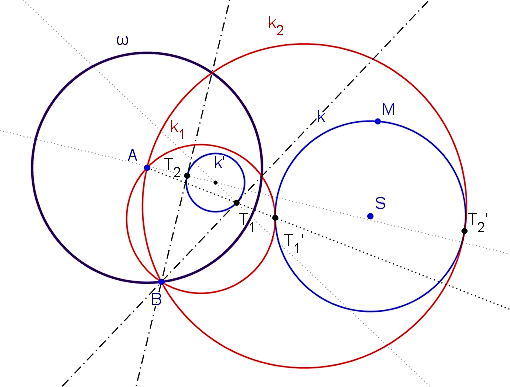
- Úlohu s tromi kružnicami riešil ako prvý F. Viete (1540-1603) v spise „Apollonius Gallus" (Paríž, r. 1600). V riešení použil stredy rovnoľahlosti troch kružníc.
- Vo všeobecnom prípade je osem výsledkov. Ak sa dané tri kružnice navzájom dotýkajú, riešenia sú dve (tzv. Soddyho kružnice).
Metódy riešenia Apolloniovej úlohy
- Množina bodov danej vlastnosti - napr.
 - Euklidove Základy Kniha 4, Tvrdenie V.
- Euklidove Základy Kniha 4, Tvrdenie V. - Rovnoľahlosť - úloha .
- Kruhová inverzia - úloha

- Gergonnovo riešenie (Gergonne, Joseph Diaz (19. 6. 1771-4. 5. 1859), francúzsky matematik a astronóm).
 \)
\)